Project:
For this week, I used my motor controller board and wrote a general serial interface for connecting to the board. To test the serial interface, I made a little python program to talk serial to the device. The serial protocol consists of simple read and write commands for accessing a virtual memory block inside the micro.
Serial Protocol:
The serial protocol consists of read and write commands and uses a simple packet frame:
Write: [start char] [Address (00-FF)] [data (0000-FFFF)] [truncated checksum (00-FF)]
Read: [start char] [Address (00-FF)] [truncated checksum (00-FF)]
Return: [start char] [Address (00-FF)] [data (0000-FFFF)] [truncated checksum (00-FF)]
Learned:
- Stk500 is pretty much the only programming option for Ubuntu under VM (spent 4 hours almost but not getting mkII to work...)
To do:
- Finish the motor part of the motor controller board
- Put in way to save memory to EEPROM
- Write small ui for tweaking and saving settings through the serial interface
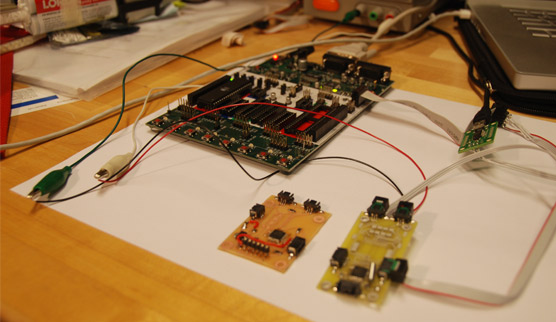
Board shown being programmed by Atmel SDK500 and interfaced through an FTDI USB to serial converter.
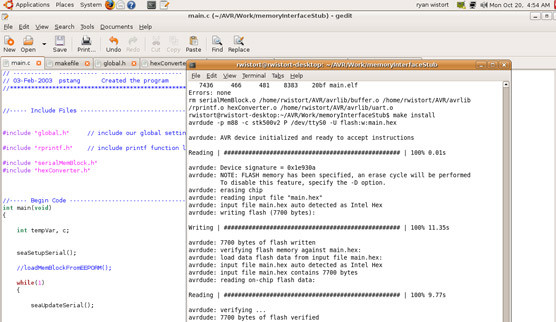
Programming the board using a toolchain of: text editor > avr-gcc > avrdude - make clean > make > make install %E2%80%93 so simple and powerful%E2%80%A6.
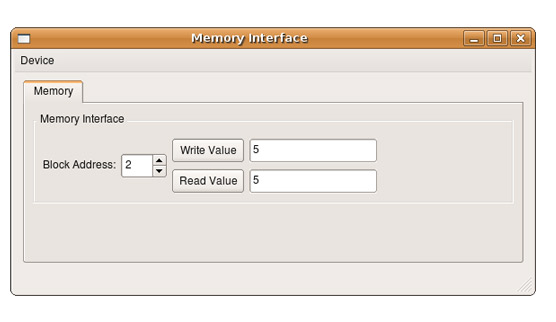
Screenshot of little pyqt program for testing the serial interface. It works!