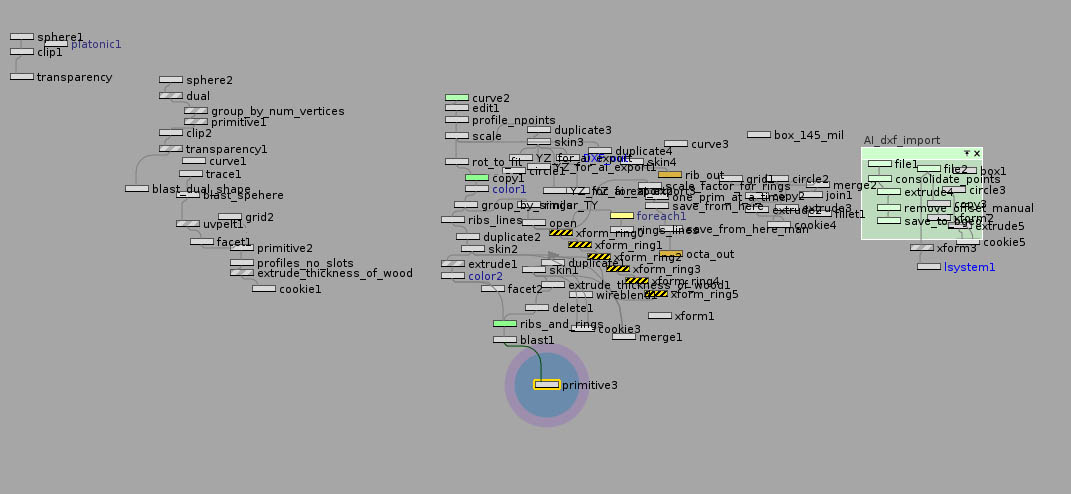
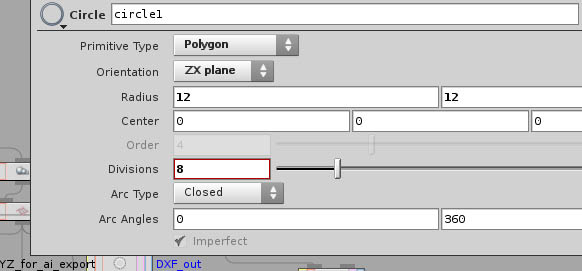
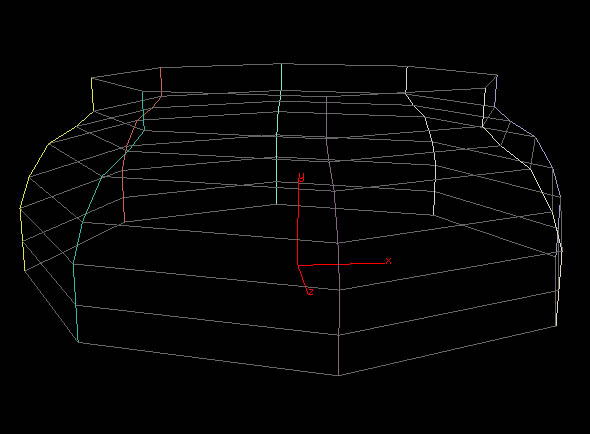
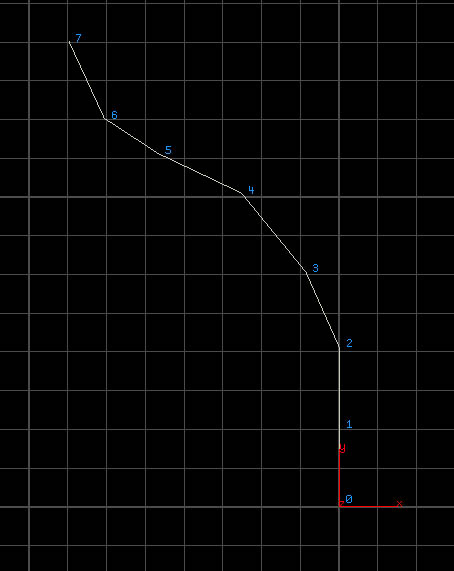
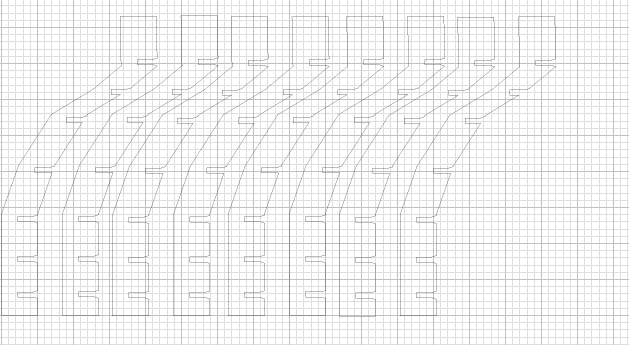
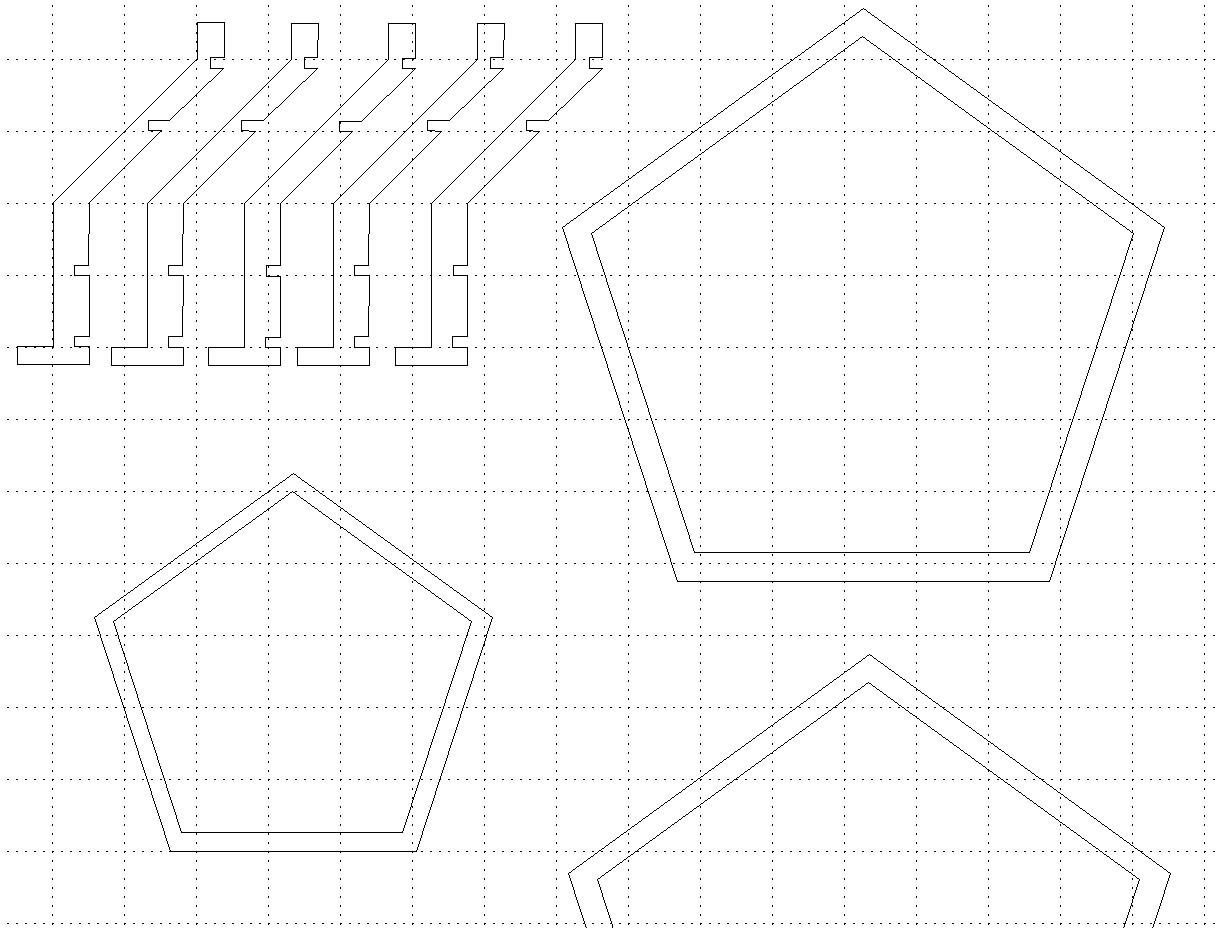
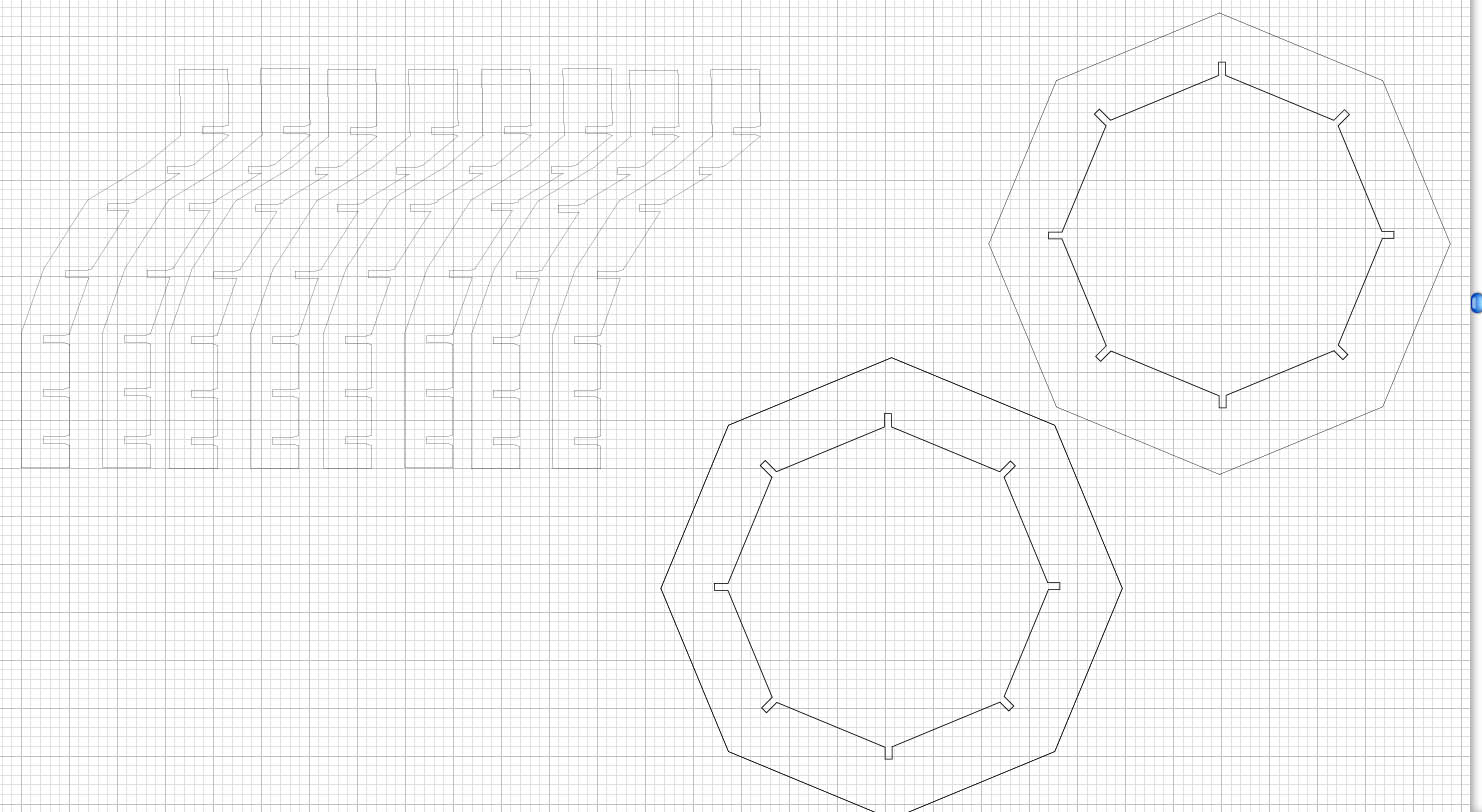
Prototyped a parametric robotic housing system "robo-hutch" that scales parametrically and creates profile curves (ribs and rings) to serve as laser cut paths. The system is controlled by a user-defined curve for the profile. The code was created in Houdini education edition.
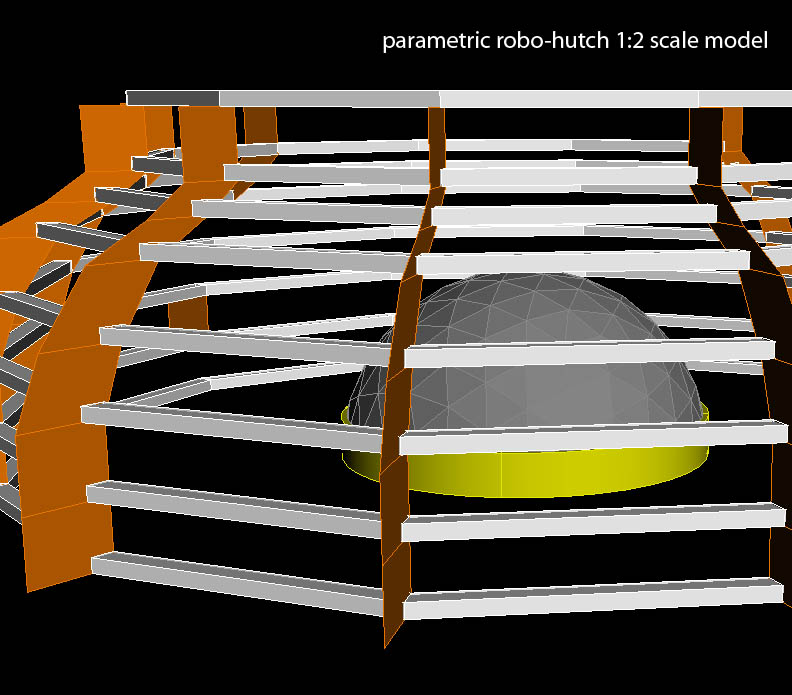


Penta-hutch output from code set to 5 didn't assemble well due to tolerance errors.



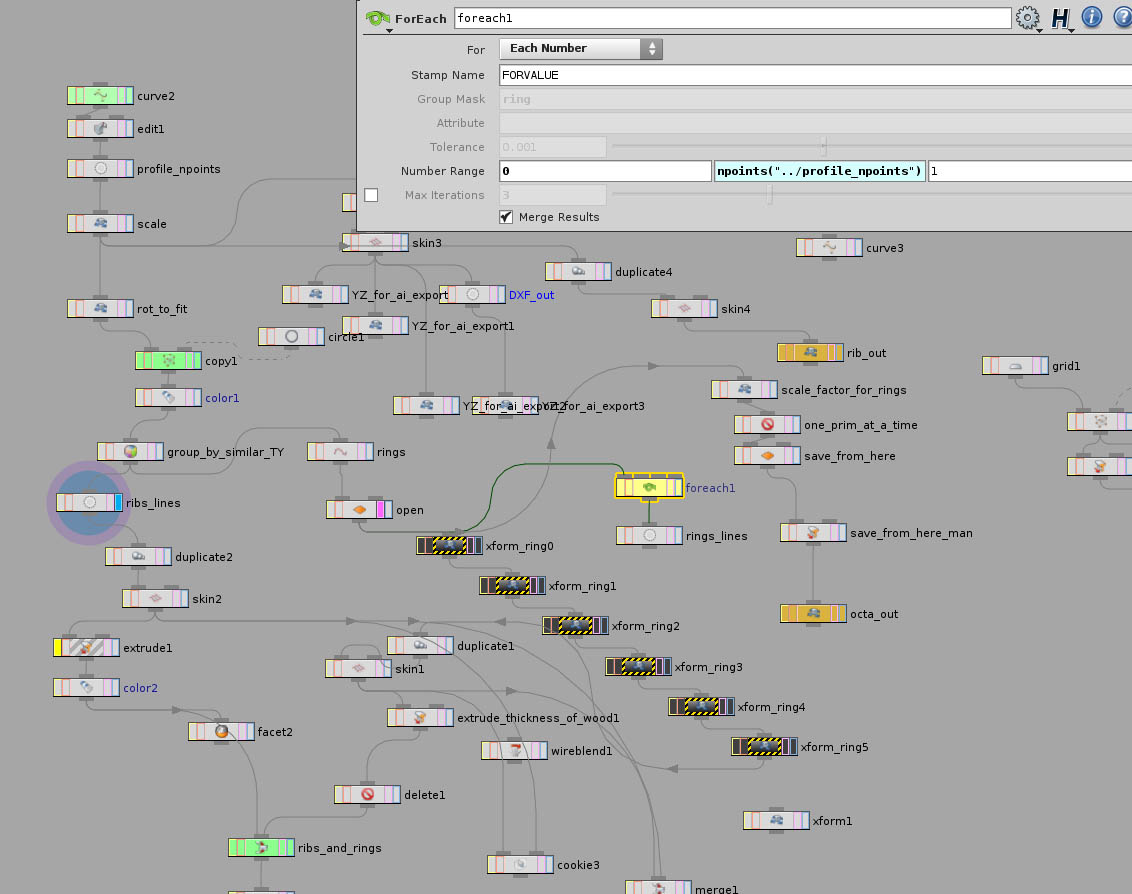
code
contact