 Carnival Game
Carnival Game
Our assignment was to measure and display something.
Fab
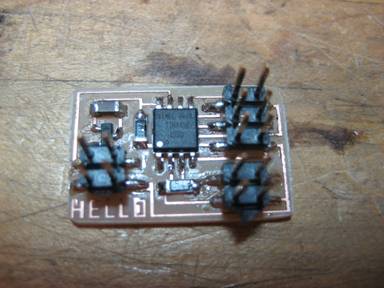
I started with the basic
step response board and code available here (http://fab.cba.mit.edu/classes/MIT/863.09/10.26/index.html). I milled this one on the Modela. It went rather smoothly until I went to load
the code. For some reason, the python
script wouldn’t run correctly. The error
was related to trying to read from the serial port. After a significant amount of double-checking
all connections and even powering the board externally, I decided to replace
the microcontroller. That did the trick. I have no idea how the original
microcontroller became damaged, but it did.
After bringing up my issue in class, Neil informed me that it is likely that my tiny45’s onboard RC oscillator was slightly out of whack for serial communication. Good news is, it probably wasn’t my fault! Neil also told me that there is a register that allows you to check and adjust the RC oscillator for just this reason. So if this happens to you, go to the tiny45 data sheet section 21.4.1 Calibrated Internal RC Oscillator Accuracy and calibrate the oscillator before switching your microcontroller.
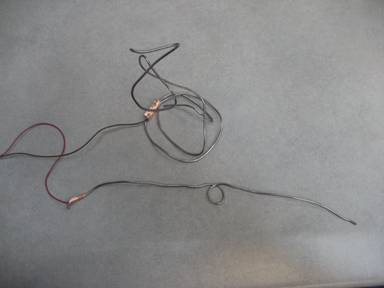
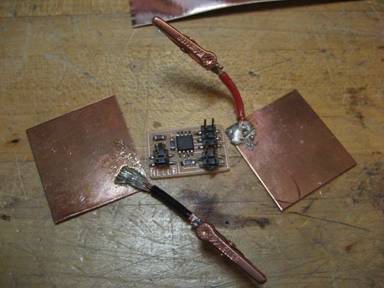
These were the plates I used to test the code and have some fun with measuring parallel plate capacitance.
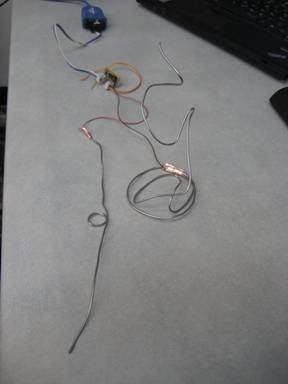
Game time (python code)
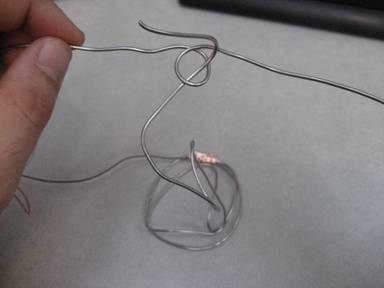
I then decided to build off the basic setup to create one of those amusement park/carnival games where you have to guide a loop around a coil (usually spinning). I used the original code to determine what values corresponding to a closed circuit and displayed simple text on the screen when the user was supposed to play and when they messed up.