Hello MAS.863, I am Ahmed, I am a second year PhD student in Mechanical Engineering and I actually made it into the class!!! I work on "squishy robots" and although I would love to make one, this might be just a little too much for the class!!!
I work alot with Magnetorheological fluids (MR), which are fluids whose rheological properties change with a magnetic field. For my project, I wanted to incorporate this aspect because I think it might bring interesting design concepts to the table.
So to experiment with this, my idea for a final project is a touch-sensitive bio-mimetic plant.
Have you ever heard of Mimosa Pudica ? It is just the coolest plant ever : if you touch it, it will automatically close its leaves to protect itself.
Here's a video to show the concept :
Cool right?
So here's my first trial at modelling & rendering a branch similar to mimosa using Solidworks :

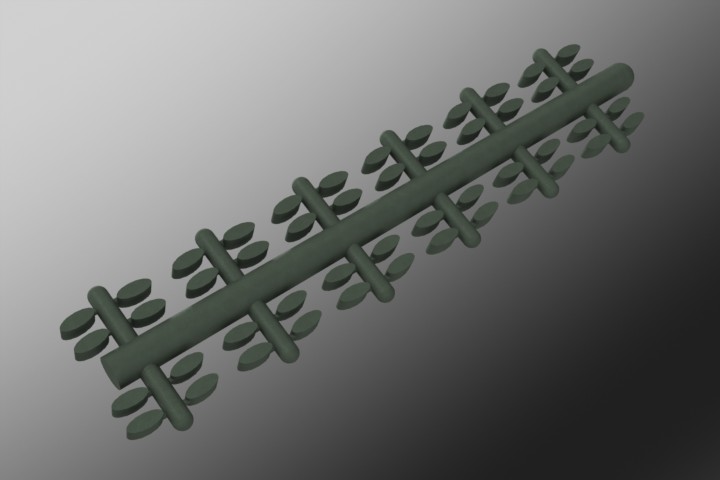
I am still figuring out the more advanced options for 3D (for some reason, it is really hard to define the surface i want to build from).
Initially, I wanted to animate it to show the leaves closing & the small spines bending but after a long time trying (I feel long sleepless nights will be my friend this semester), I have abandoned that because it seems my drawing is too crude for this. The way the CAD is right now doesn't allow pieces to move realtive to each other. I would have to model the hinges and all the links which I don't think is worth it.
This is especially true because the way I would want it to work is by having an active hydroskeleton of MR in little channels in the spine and the leaves that will activate/decativate depending on touch. I still have to figure out the touch sensitive sensor but hopefully that will come with time in the class.
I also thought of another design idea which would be easier and probably more controllable. I think putting the leaves in a lotus flower manner should make things easier. The drawing was done using Inkscape to make me used to its commands.
Hopefully, by next week my CADing will be much better and I would have understood the mysteries of the animation tools.