week 11: Networking & Communication
|
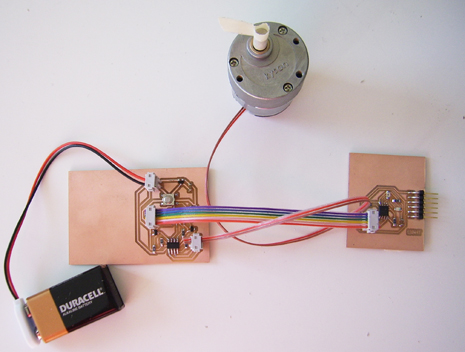
For this week we had to make two or more boards communicate. I chose to have my light sensor board, from week 7, control my motor board from week 9. |
|
|
When the light sensor doesn't receive light, the LED on it's board turns on and the motor on the other board rotates counterclockwise. When the sensor receives light the LED turns off and the motor rotates clockwise.
|
|