Fail #1: Oh God, I'm so embarrassed. I swear this has never happened to me before!

Fail #2-4: Bend Sensors
Not Enough Nitinol.
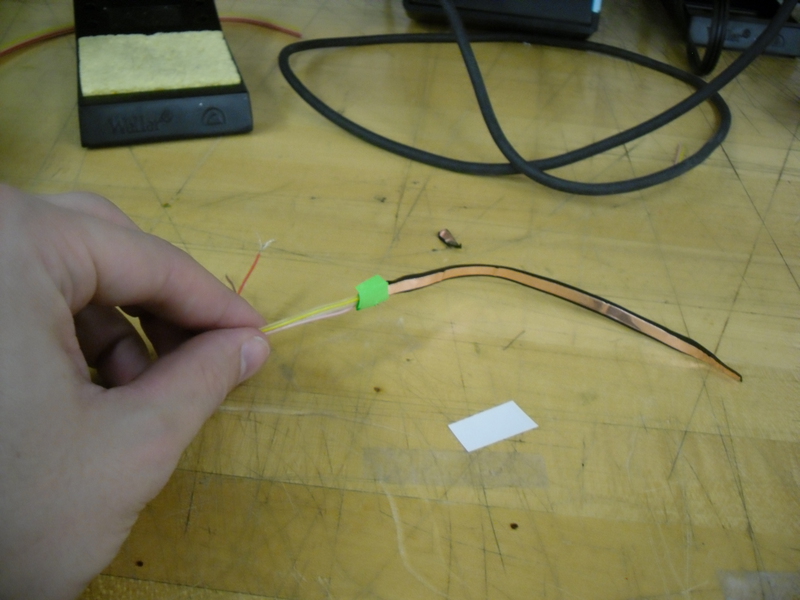
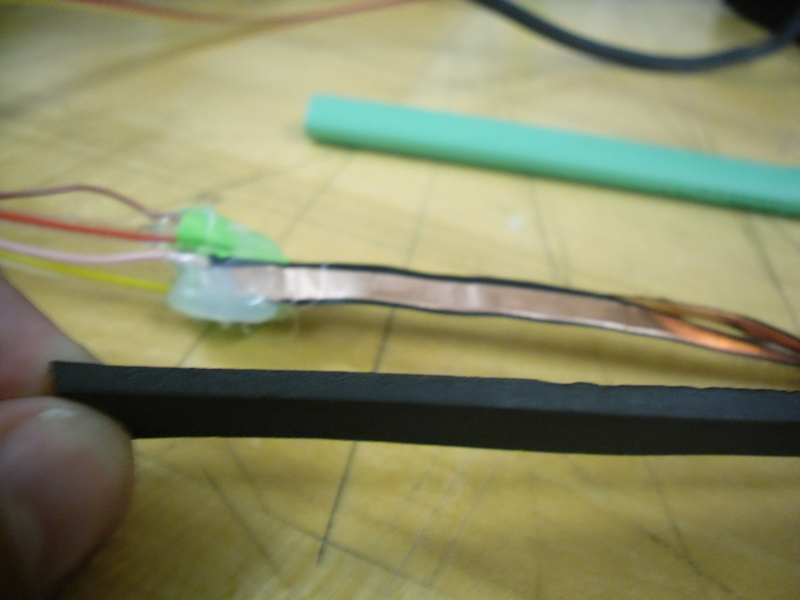

Step Response is Harder.


The Resolution is Just Too Low



Lessons Learned: Follow this tutorial. If you want accurate bi-directionality, don't try to put two sensors on either side of a flexible core. Decouple them completely. A single fabbed bend sensor only has about two or three bits of resolution (in my estimation). So you don't want to do high fidelity measurements with them.
Fail #5: Face Cutting

Lessons Learned: When it says to allow 24 hours for the glue to harden, don't try to mill after 6.
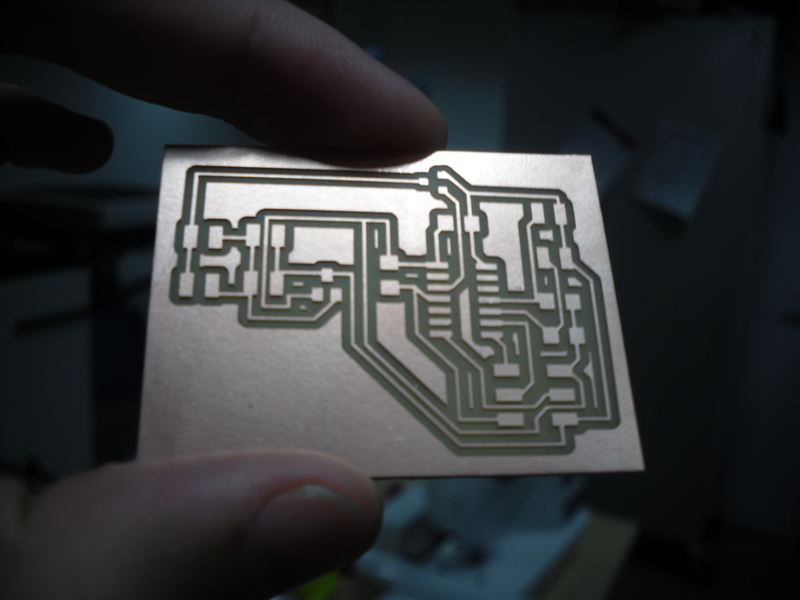
Fail #6: Board Design
It started out so well.
And somebody even cleaned up the shop.
But then nothing worked.
My poor board needed some outpatient surgery.
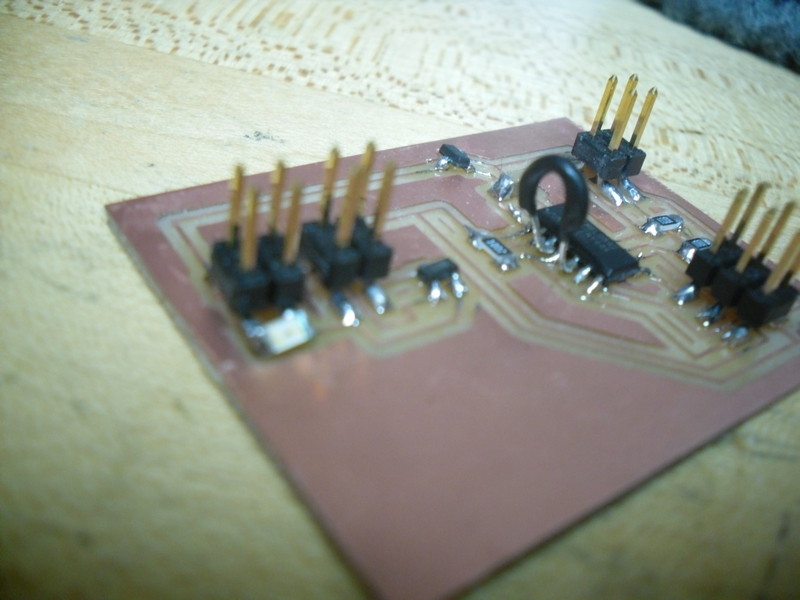
Lessons Learned: There are only 2 pins on the tiny44 that can PWM. Read the @#%&ing datasheet BEFORE you solder. Also, if you're going to drive a DC motor with PWM, you need a diode from the ground to the VCC pin of your motor (opposite the way current should flow). This allows the back EMF of the motor to dissipate when the PWM signal switches off. If you don't have this diode, your motor will just wiggle, and you will go insane. Finally, if you accidentally attach your battery backwards, even for a fraction of a second, your voltage regulator will become a tiny little fireworks display.
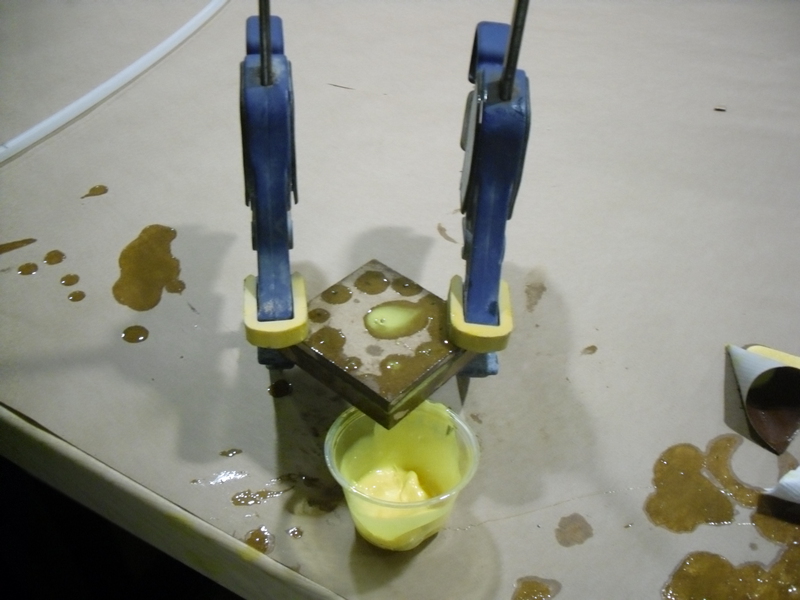
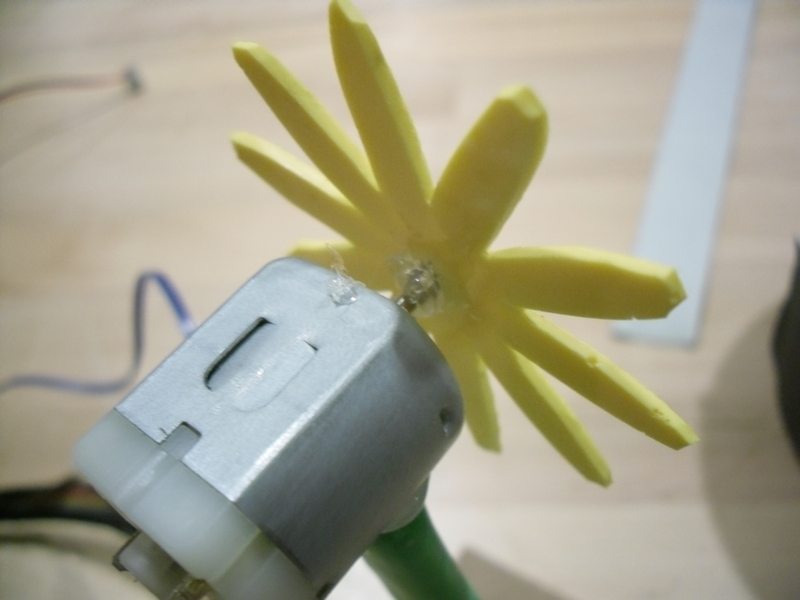
Fail #7: Let's Mold a Flower for Absolutely No Reason...
Terrible, costly mistakes are okay, as long as we learn our lesson.

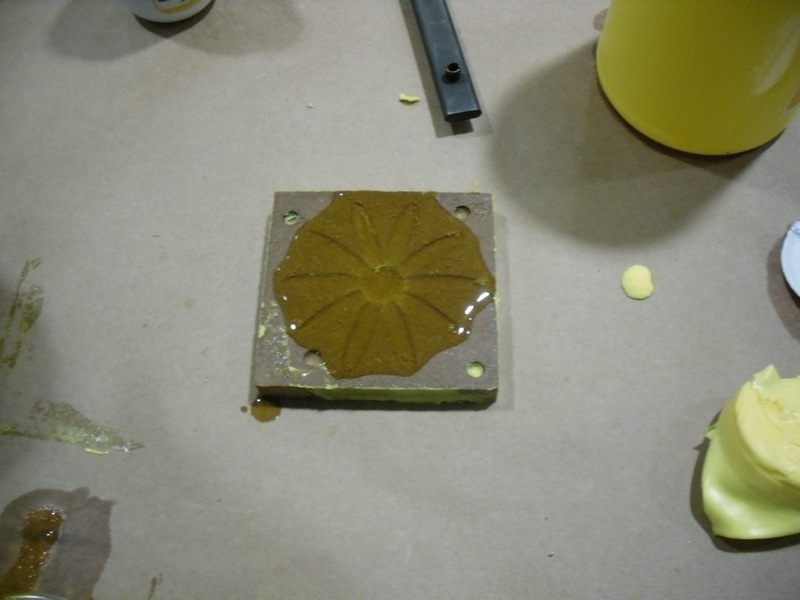
There is a limit to what you can cast without pressurized injection.



And I settle for mediocrity once again.

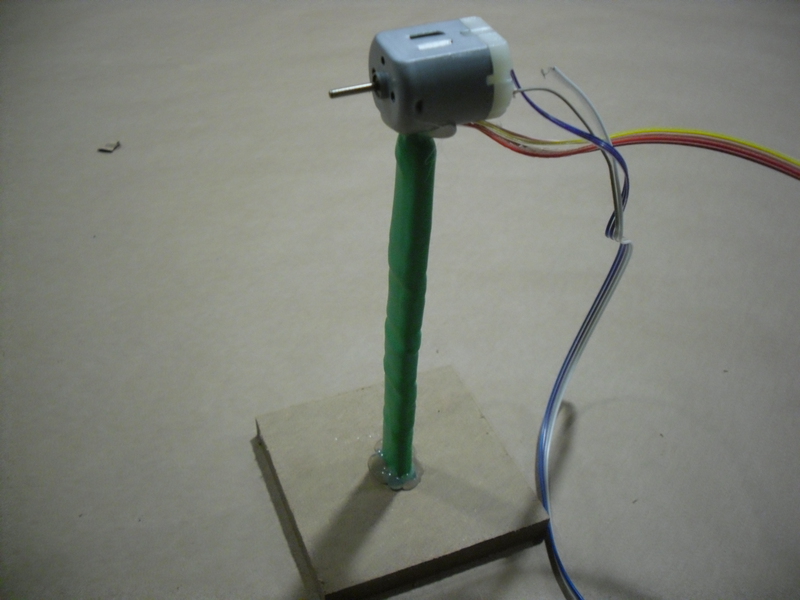

What it was supposed to do:
Keep itself upright using flower petal fan blades. The bend sensor should have detected deflection with relative accuracy (in either direction). Then a PID controller should have spun the fan with just enough force to keep the stem vertical. The idea was that you could blow on it, and it wouldn't move.
What it does:
Get angry when you bend it.