My group (Personal Robots) is working on a space for kids with projected floors and walls. They will be able to interact with both physical and virtual objects, and be able to see into an adjacent virtual world. Robots act as intermediaries between the real and virtual worlds, able to travel from one to the other via "robot hutches," which the robot disappears into to reappear as a virtual representation of itself in the other world.
One of my research interests is remote communication for kids, how they can stay connected at a distance in a playful way. Physical objects help ground kids in social interactions and play, and that is missing from long-distance conversation, even with video. It's also challenging for them to visualize what the other person is seeing when using video communication. One idea is that instead of seeing each other as though they are facing each other, they share a view onto a single virtual space. The robot can then act as a messenger between the two. A key part of this is being able to carry physical objects out from the virtual world, and from one remote place to the other. So my plan is to build a robot that can receive objects and autonomously pick them up and put them down. This way it can go into the virtual world and come back with something real.
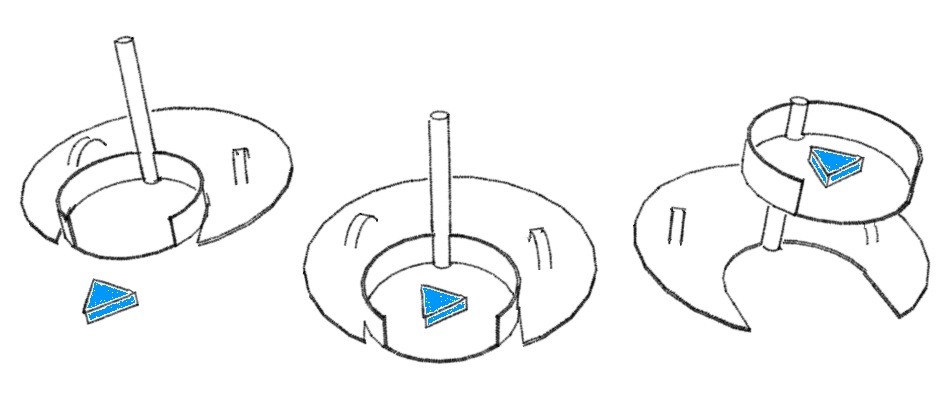
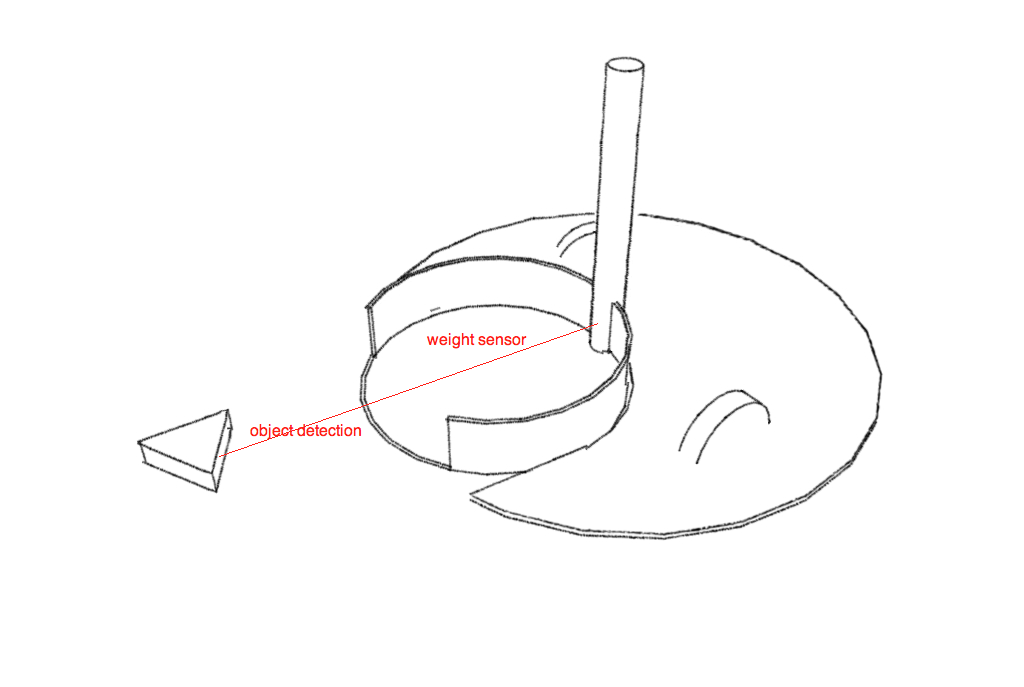
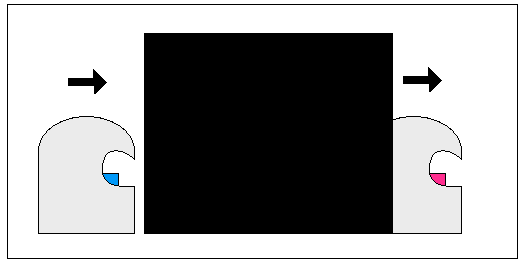
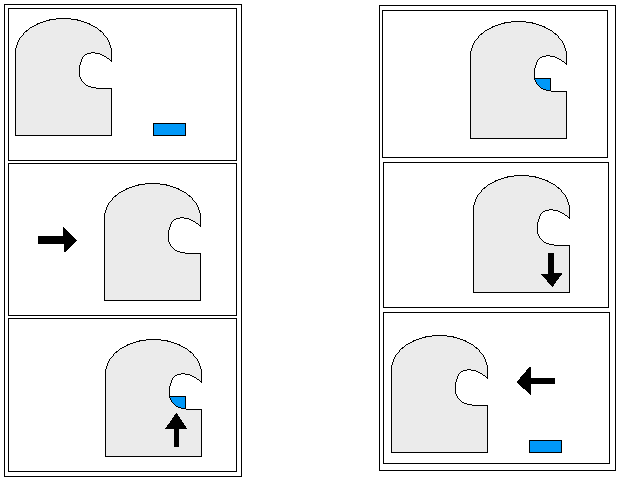
The robot's shell will be felted wool, and the place to put and receive objects will be on the inside so that the person interacting with it will have to reach inside its tummy or mouth to get it. Currently working on a Blender model of this fuzzy shell, in the meantime here are some ideas for the mechanism and interaction.
I have never built a robot before so this will be a exciting challenge.