Final Project Plan
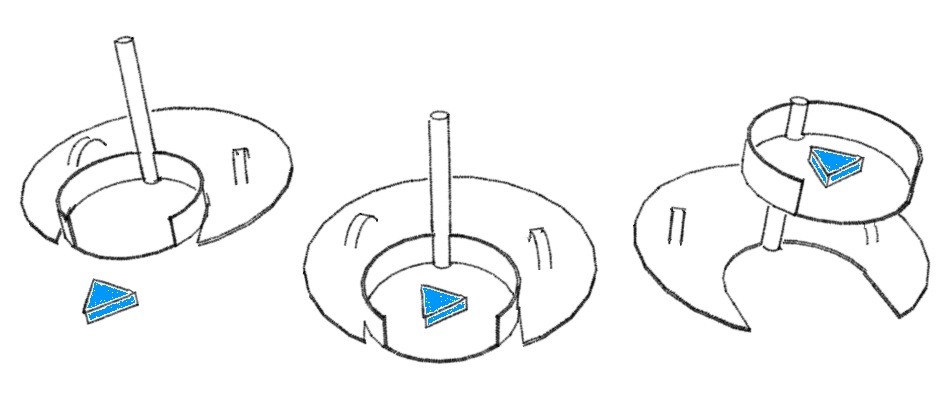
I will make a robot that can locate specific objects, pick them up, and load them into an internal compartment.
I will need the following materials (some of which I already have, but putting prices down anyway):
Plywood for outer shell and base: $30
Foam for outer shell: $10
Fabric for outer shell (most likely fleece): $5
2 Motors, gearbox, and wheels: $40
2 casters, ball bearing type: $10
Servo to drive lifting arm: $10
Rechargeable battery pack: $30
Scoop mechanism, possibly 3D printed: ?
Electronics components, more details below
These are the subsystems
Mechanical design (where everything fits, driving, scoop mechanism)
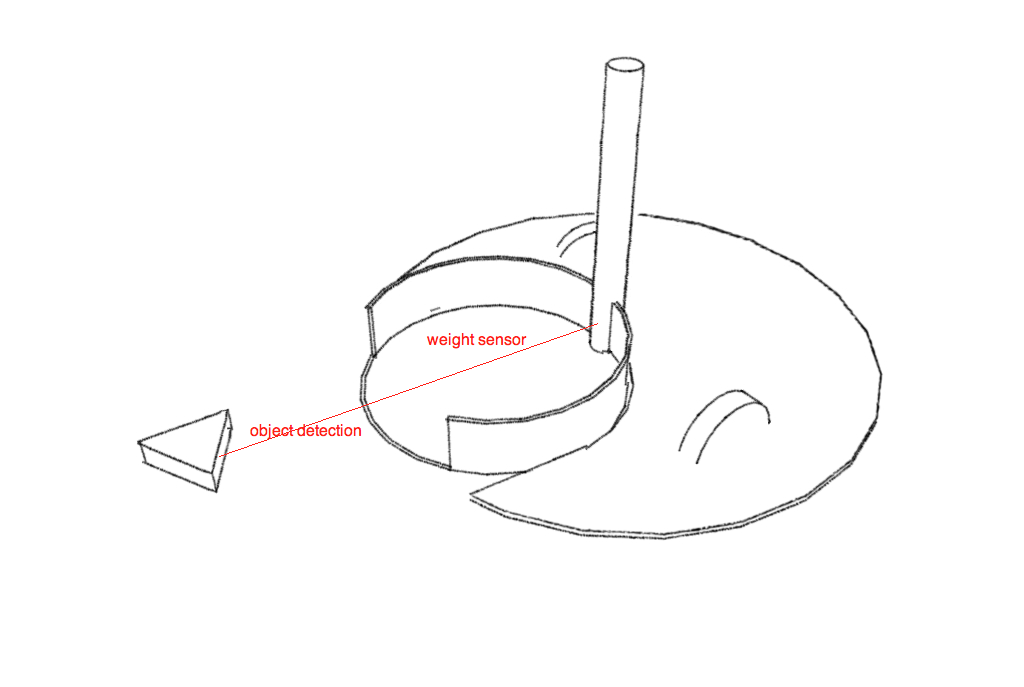
Electronics design (power with regulators, microcontroller, object detection via distance sensor,
To be determined:
The best way to localize the objects to be picked up. Distance sensor? Wireless camera with off-board vision processing? RFID?
Timeline:
10/18: program a microcontroller to control robot drive train and servo. Add power regulation circuit.
10/25: Make miniature scoop mechanisms during 3D printing.
10/01: Integrate distance sensor.
11/08: Build robot base.
11/15: Build shell.
11/22: Make final scoop mechanism.
11/29: Build robot control/communication system with Zigbee.
12/06: Integrate all subsystems.
12/13: final project presentations