This week:
Network:
Hacked some of my existing boards to try to run Neil's
serial code. Looks like I may have cooked a board or have a
loose connection -- the small one doesn't want to program this week.
The working one seemed to be responding. Will
look more when I have a little time.
Boards of the week:
This week I drew up some more motor control
boards...
The first ones, I was going to use a
compatible chip (DRV8811) to the A3977, but it may actually a
compatible chip to the A3979, which comes in a much smaller
package. Oops.

Then I made an adapter board for some older
monolithic motor driver chips, so that I had something for the short
term. They will be hooked to the microcontrollers with a
ribbon cable, so I can swap back should I build an IC level solution.
I also relaid out the 8 channel MOSFET board
with SMT logic level
FETS. It is shown here, and should drive some unipolar
motors.

Flexure Discussion:
As Neil suggested, I found and talked to a
researcher about flexures (doesn't MIT have a researcher for
everything). They work awesome for very fine
positioning. Typically they use a force driven
actuator... (i.e. voice coil/electromagnet). The
downside is that the assembly is about 10x the size of the workspace --
i.e. a 1 inch cell would yield a 10 inch
assembly. They sound cool, but I was thinking
of stuff on the more macro level (inches of movement).
He also made interesting comments about how I might make
various positioning assemblies (pros/cons of cable v.s. belt v.s.
screw, and where to put bearings), and suggested making some
air-bearings. Overall a fun conversation.
Final Project:
The Origional Grand Plan: Automate the world!
The initial plan was to build a toolkit of hardware/software for
building machines. The idea was, since it was a
toolkit, it should lower the bar to building various
machines.
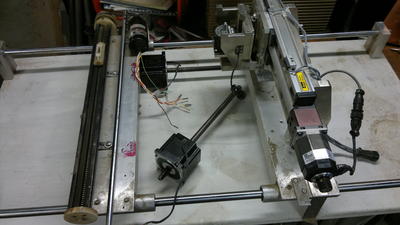
Here is a sample of the parts I have around that I was thinking could
be converted into a pick-and-place machine, cnc router, solder paster
dispenser, or all of the above would manufacture a PCB.
Status:
- Screws are ordered but won't arrive until late in
the week. Don't have driver solution for large
motors yet.
- Large stepper motors is stimeyed by the small pitch parts...
(htssop package)
Home stretch plan:
-
Reduce Scope: Look at completing the 3D scanner.
Todo:
- Add axis for Z.
- Fix USB-Stepper code to be more robust and spin the motors at
stable speed.
- Calibrate and fix geometry code.
- Complete multiprocessor solution.
- Figure out STL/output
- Optional:
- Build sexier stepper drivers
- Make it do something else cool.