This week we build circuits to control output devices, including the following:
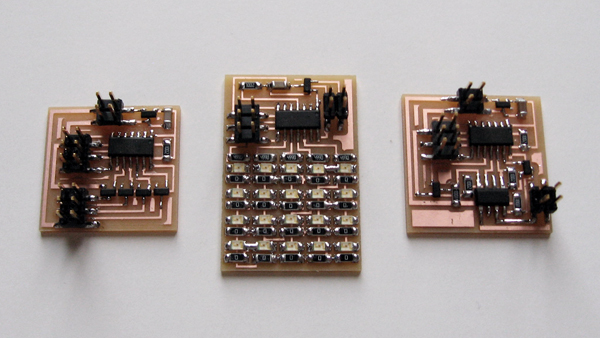
Stepper Motor layout (ATtinny 44 + 5V regulator + 4 N-Mosfets).
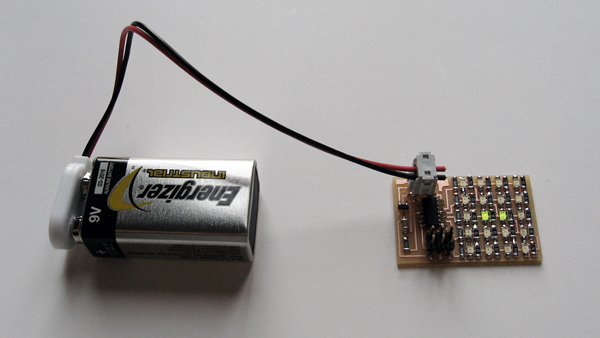
LED Array layout (ATtinny 44 + 5V Regulator).
DC Motor layout (ATtinny 44 + 5V regulator + H-Bridge).
For more detail on parts refer to the class inventory.
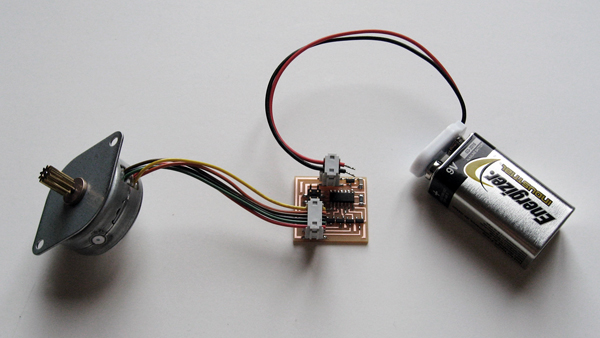
Stteper Motor: The circuit is designed for a 6 lead Unipolar Stepper Motor that needs 4 N-Mosfets to provide enough current.
LED Array: The circuit controls an array of 4 by 5 LEDs using only 4 pins (Charlieplexing).
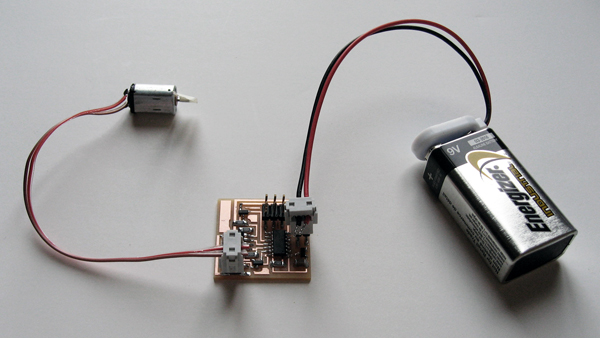
DC Motor: The circuit controls the polarity of the DC Motor and therefore the direction of rotation by using an H-Bridge.
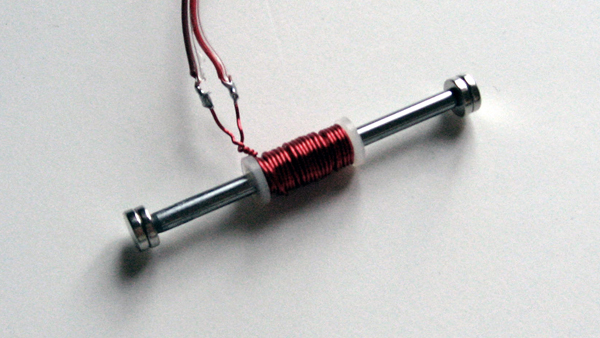
A solenoid can be made using magnet wire (enameled copper wire), a plastic shaft and a ferromagnetic bar (iron). Basically, the idea is to wrap the wire around the shaft and then fit the iron bar inside it.
The long wire has small resistance, and by placing a voltage difference it generates high current (electrons moving) that creates the magnetic field. The iron bar is then attracted (and moved axially) according to the polarity of the shaft. The strength will be based on the number of terms and the current (low resistance, high current requirement).
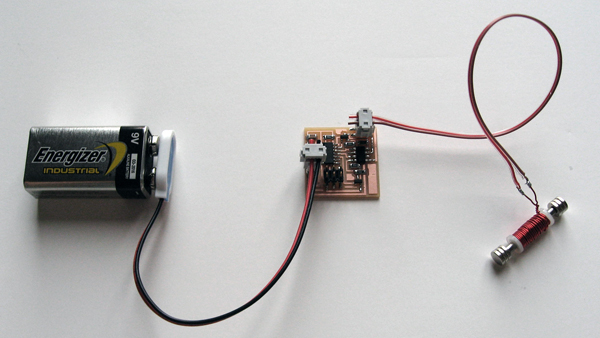
I included permanent magnets in both side of the iron bar to increase the effect. The polarity of the permanent magnets is important because it defines the movement direction of the bar in relation to the shat polarity. I used an H-Bridge to change the polarity of the shaft and play a bit with the behavior of the iron bar.
Here a couple of very nice tutorials: Arduino solenoid tutorial and make your own solenoids.