
Shadow Box (Concept/ Updated)
The goal of my final project will be to create a mechanically actuated shadow puppet that is controlled through a gui software interface
1 | What will it do
The shadow puppet will be created from laser cut paper and/or wood and controlled by a series of stepper motors. The goal is for it to have 8 points of articulation. The puppet will be controlled by a GUI developed in openFrameworks. Interaction will occur by manipulating a digital puppet on screen and having the puppet respond in reality. If this is achieved successfully, I will attempt to integrate Kinect skeleton tracking as a means of controlling the puppet
1 | What's been done before?
There's been some precedent set for virtual projected puppets using the kinect by Emily Gobeille and Theo Watson. I plan to expand on projects like this by incorporating an actual physical puppet.
Interactive Puppet Prototype with Xbox Kinect from Theo Watson on Vimeo.
1 | What will I need to develop?
I've already developed a basic Gui to control a single stepper using openFrameworks and a Fabdiuno. I've also written an initial inverse kinematics system for the gui:
OF kinematics stepper control from jennifer jacobs on Vimeo
I still need to determine a way to network upwards of 6 stepper motors and connect them to the puppet in a way that allows for freedom of movement. It is possible that I will need to build a gear mechanism to provide the smaller steppers with enough power. If I am able to get to the point of developing Kinect control, I will build off of my previous work with OpenNI + OF for the skeleton tracking.
1 | What will be done when?
- Dec 5: Basic gui Kinematics, individual stepping control of motor through software interface
- Dec 6: Integration of software interface and networked processors
- Dec 7: Build basic puppet arm mechanism- 2 points of articulation
- Dec 8: Coordinate gui with 3 steppers
- Dec 9: build puppet skeleton
- Dec 10: Coordinate gui with 4-8 steppers - this day will determine number of possible points of articulation
- Dec 11: Design Puppet
- Dec 12: Break
- Dec 13: Design and Cut final puppet
- Dec 14: Construction
- Dec 15: Construction
- Dec 16: Refine gui interface aesthetics/ Debug
- Dec 17-18:Kinect Integration (optional)
- Dec 18:
- Dec 19: Present completed Project
- Week of Dec 12: Software and Testing
1 | What materials and components will be needed and what will it cost?
Materials already acquired: Kinect, mini-steppers, paper / wood
Materials required: gears??, larger steppers? atmega168 (2), h-bridge (8), wire/ gen electronics components
Total Cost for remaining materials: approx. $40.00-60.00 USD
1 | Box Structure
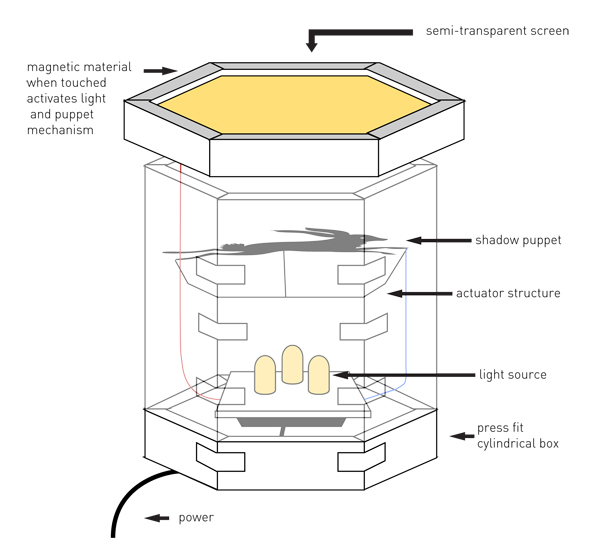

Each box is constructed as a press fit hexagon. The lid of the box contains a semi transparent screen and a border of magnetic material that acts as a capacitive touch sensor. The bottom of the box contains a light source and houses the power. The middle section will house the puppet actuator mechanism. Each puppet will be constructed out of laser cut paper and will be set in motion via shape memory alloy. The puppets will be designed to be removable so that a single box can house a variety of puppets.
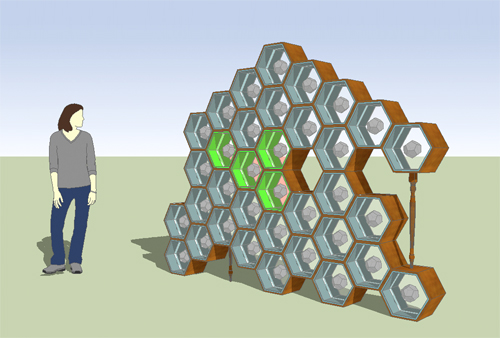
2 | Modularity
The boxes themselves will be modular so that they can be stacked together into larger structures. The ultimate goal for this project is to create a mechanism for a modular large-scale interactive art piece.
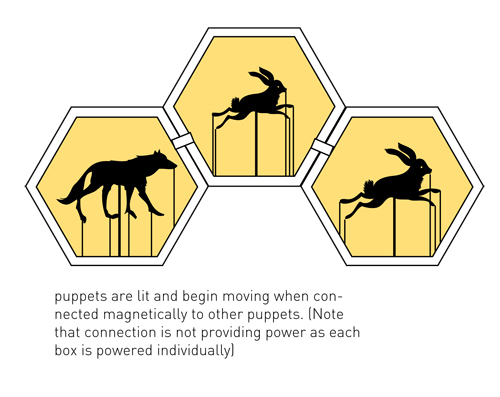
3 | Interactive Art Piece
Each hexagonal box when stacked in a large assembly can be structured so that they only become operational when connected to another box. The boxes can then be activated by the public. Because each hex edge is magnetic, by placing a metallic connection, (a paperclip for example), between the hexagons, the public creates a perceived circuitry that activates the hexagons and the shadow puppets within.