
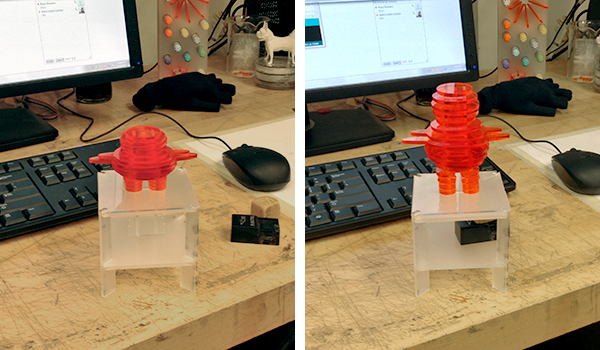
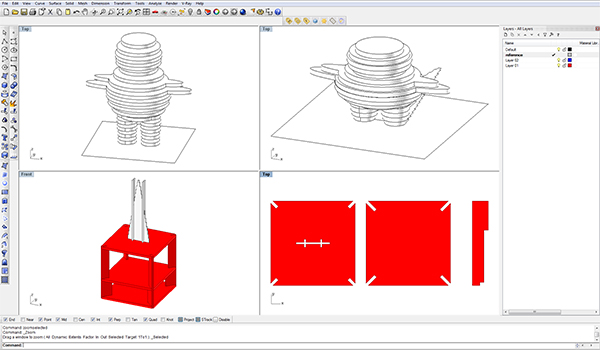
What?: Proximity activated accordeon figure
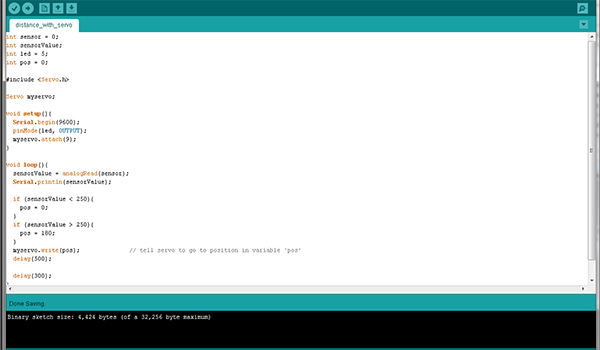
Software: Rhinoceros, Arduino.
Tools: laser cutter, Arduino Uno, Sharp Distance Measuring sensor, Micro Servo A0090.
Materials: Acrilyc, superglue, cables.
Why?: Preparation for my final project, which includes an expanding structure as well as a proximity sensor and possibly the use of a couple of servos.
Process:
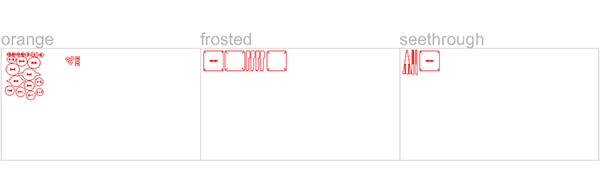
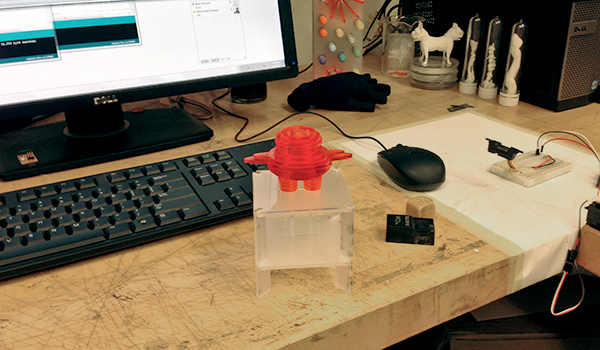
1. Preparing cut files: I built a complete 3d model of the figure and all of its parts and then tried to simulate the way all the parts would move in order for the accordeon effect to work, since I am using the same material I used for my week 2 assignment I will use the tolerance calculations I made back then. (very important to have the right tolerance measurements for this, the accordeon mechanism depends on 1 mm steps in order for it to work)
2. Accordeon Mechanism: A stepped triangular shaped piece travels through the layered parts that make up the body of the figure, each layer has a slot of a width that matches that on one of the steps in the triangular shape.
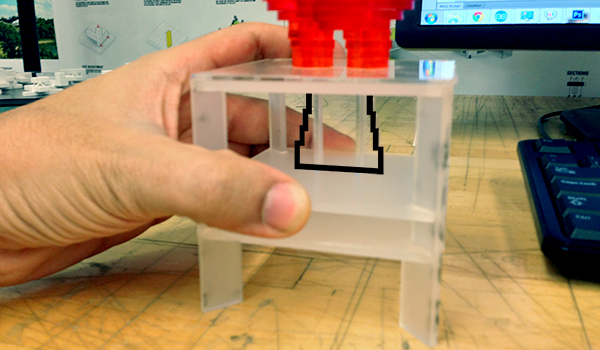
The triangular stepped piece sits on a platform that is meant to be moved up and down by the servo as the platform moves up along with the triangular piece each one of the layers sits on its respective slot and the figure expands.
.jpg)
3. Proximity Activated Servo: In preparation for my final project I set up a circuit that detects whe an object is close to the sensor and activates a servo to move 90 degrees. The idea for the final project is that your night lamp will turn on as soon as you place your wallet (or any other object) in front of it.
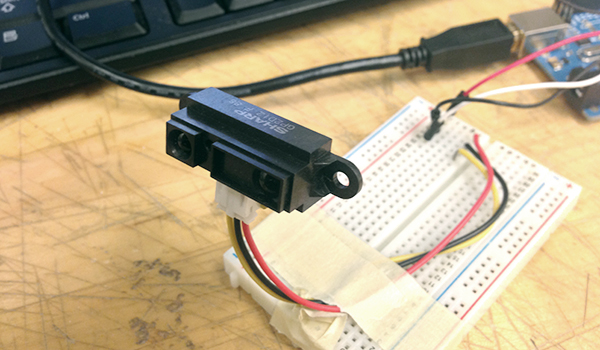
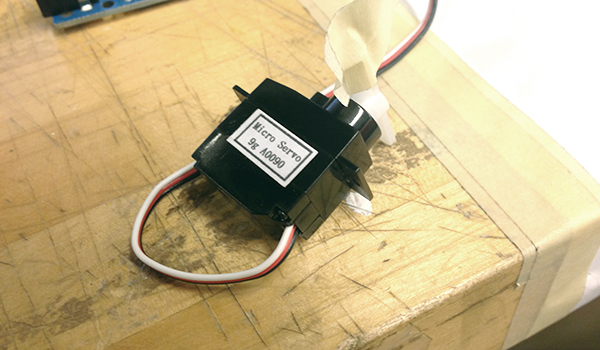
For this project I was able to get the motor / sensor working, unfortunately the servo I picked out was not powerful enough to lift the figure so the 2 parts of the project did not come together in the end.. on a positive note, here is a video of the sensor + servo in action:
4. Conclusion: Playing around with the sensor, servo and how they might interact with an expandable structure was very useful as I look towards my final project, I figured out the things I have to pay attention to when trying to program set-up the sensor and servos such as the servo's actual power and the always crucial question of tolerances.
I was also finally able to run arduino on my computer and found it to be fairly easy to understand.
.jpg)
![]()