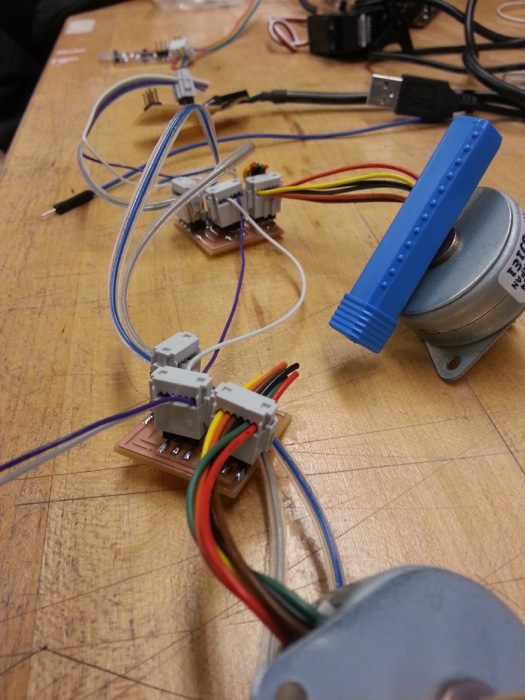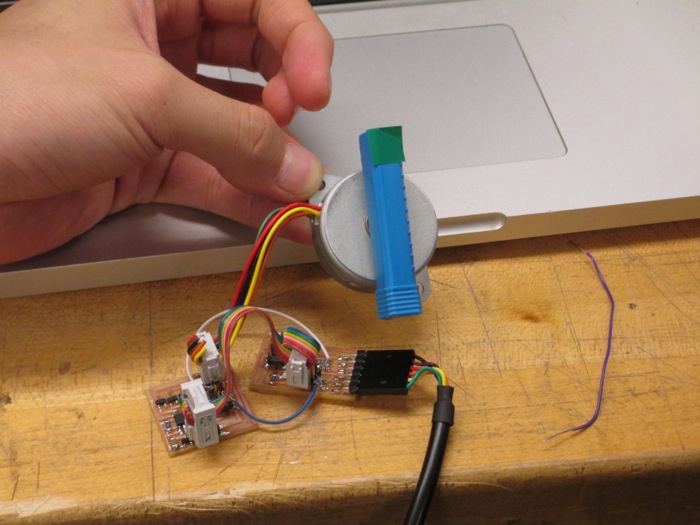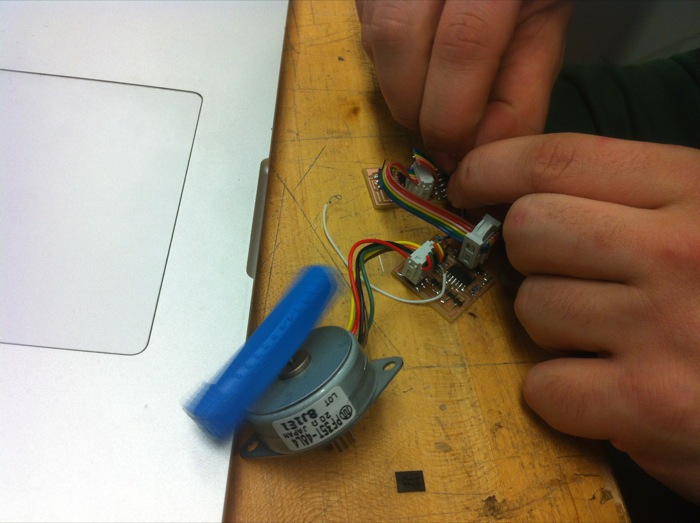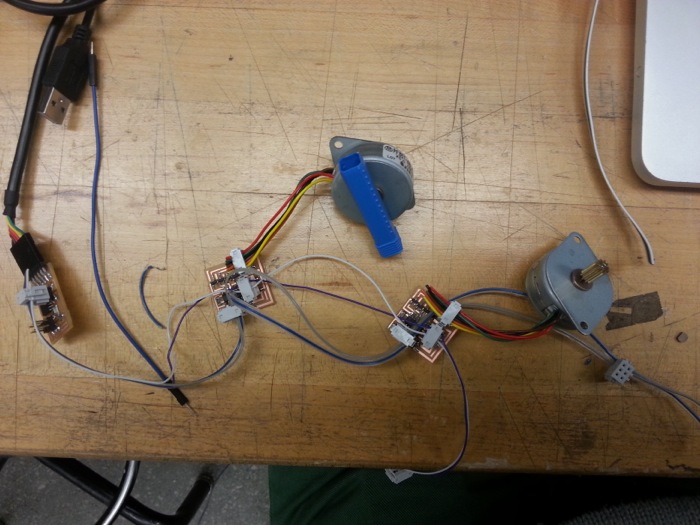
As our machine design and my final project required use of stepper motors for motion control, I decided to use networking assignment to control several stepper boards over a network. Instead of designing new boards, my aim was to find a way to use existing stepper boards. Matt suggessted to use ISP pins for Rx/Tx communication. In the beggining it take time to understand the system, but in the end using MISO/MOSI pins worked for serial communication between boards. I have connected one bridge board to two stepper boards over ISP and control them with their unique IDs.
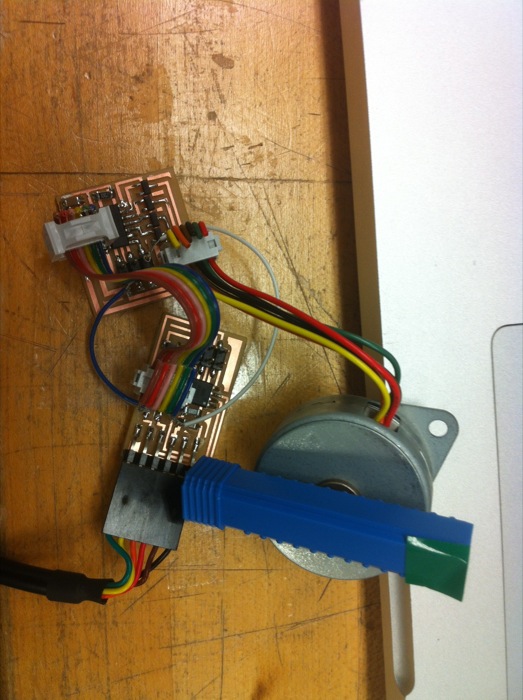
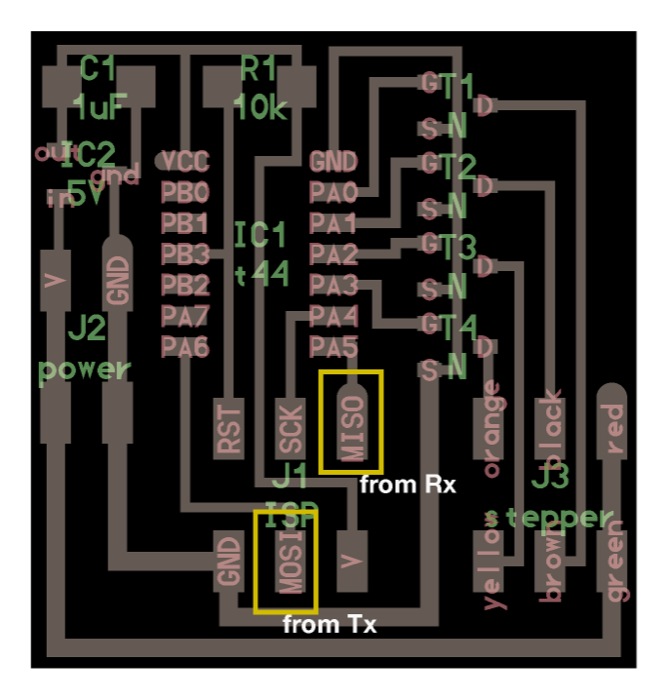
When you look at the board for stepper motors, MISO and MOSI pins are the ones to be connected to Rx/Tx out of the bridge board. I have splited the 4 pin out from the bridge board to Vcc/Groud pair and Rx/Tx pair. Vcc/Ground pair easly fits on existing header on stepper boards.
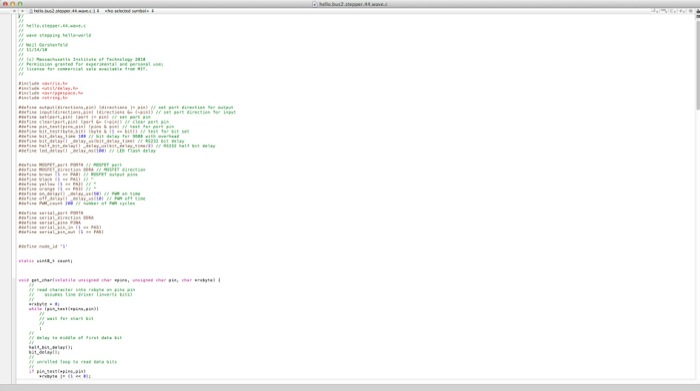
For programming the board, I have blended two Hello codes, Hello Stepper and Hello Bus codes into one code. There was some parts to be changed, the most important one is the pin and port names. As I mentioned above, I used MISO and MOSI pins on the microcontroller to communicate with the steppers, on tiny45 these pins are PA5- PA6. Existing port and board names must be replaced with these ones.
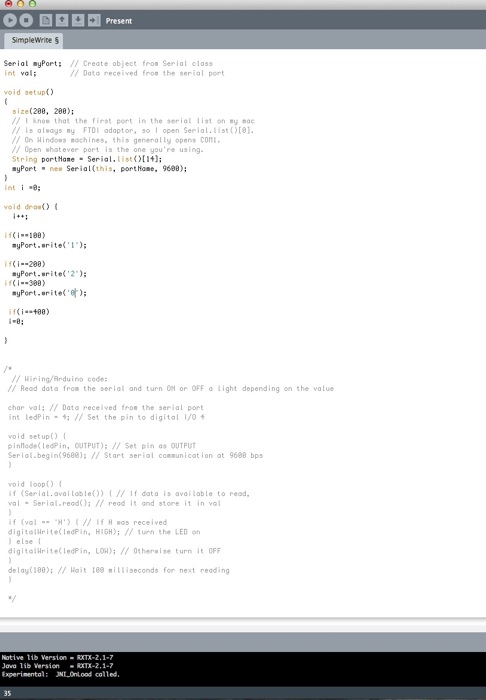
I used a simple processing code to test my boards, sending each unique ID consequantly. I did not changed default configurations of stepper boards, they just waved as in the examples. The next step is to control the step size and direction according to x and y coordinates.