
week one: final project proposal
For my final project, I may make the kite aerial photography rig I've always wanted. I've experimented with KAP before, using ad hoc equipment, including fishing bobbers, rubber bands, and key rings. It's time to make a proper rig.
 |
 |
 |
This prototype needs to be:
In thinking about this project, I imagine two directions to take: fancy schmancy and stupid simple.
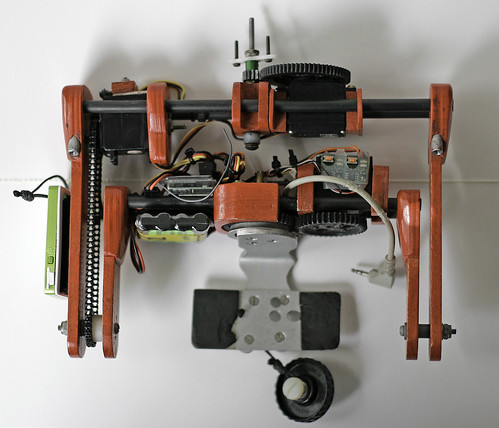
There are commercially available KAP rigs with servo aiming via radio control, as well as those built by professional photographers, like the one below.
 |
 |
 |
I think there's still a lot to do to improve these kits, including simply making an open source version that is fab-lab-able. This rig could include active leveling, motion damping, real-time transmission of photos via G3, and geotagging, but the real attraction of building my own fancy schmancy rig is to control the camera direction in real time based on photographic processing on a laptop or in the cloud. In particular, applications for mobile already help you build better panoramas interactively -- the same type of feedback could be used to control the servos aiming the camera. Another application with real time feedback is building 3D models via photogrammetry -- a perfect application of kite aerial photography for documenting landscapes and architecture that would be drastically easier with active control.

Though not as sexy, it's almost more fun to try to build the simplest, cheapest version of a KAP rig that performs reliably well and has enough capability to enable the fun applications of KAP, like panorama building. If such a design was good, it could reach the hands of way more folks without a DSLR sitting around, waiting to be launched...
The cradle holds the camera, and should give a reliable elevation angle to the camera. Some cradles claim to be "self-leveling", but with the unknown center of mass of the camera, especially when the lens starts moving, this usually gives inconsistent results. One idea for an extremely simple cradle is shown below, cut from a single piece of thin steel and folded along perforations. The mounting holes accept a quick release hitch that leads to the kite line. The different holes give different elevation angles, depending on the center of mass of the camera. build a mechanical timer to point camera and trigger shutter, with adjustments for both.
 |
 |
This design is simple and easy to make, but it doesn't give any way to control azimuth angle. In fancy rigs, this is done with a servo, but let's keep it simple. Lots of very cheap plastic toys have a wind-up knob that slowly rotates, driven by a tensioned spring. Can we make one that slowly turns the camera?
 |
 |
that, or I'll make a carbon fiber glider.
