Final Project –
Knockdown warning indicator
Coming together (in a
New York hotel room)
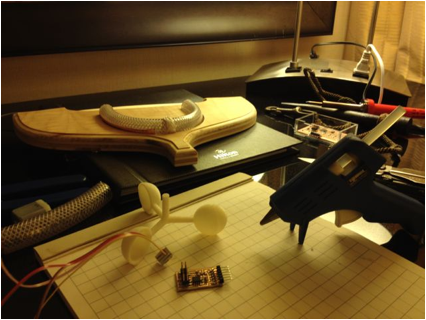
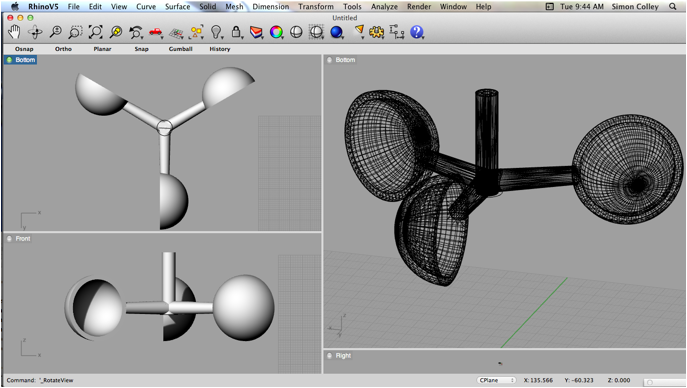
Anemometer – wind speed indicator.
I 3D printed the part from a model I made in Rhino, and mounted it on a 12v DC motor.
Inclinometer – step response based on TxRx, using a curved piece of hose and some copper strips. I had initially planned on filling the ends with hot glue, but this slowed down the water movement considerably and thus reduced the effectiveness of the sensor, so I only partially filled them. I mounted the tube on a piece of birch ply I cut out using the CNC 3-axis mill in the hobby shop.
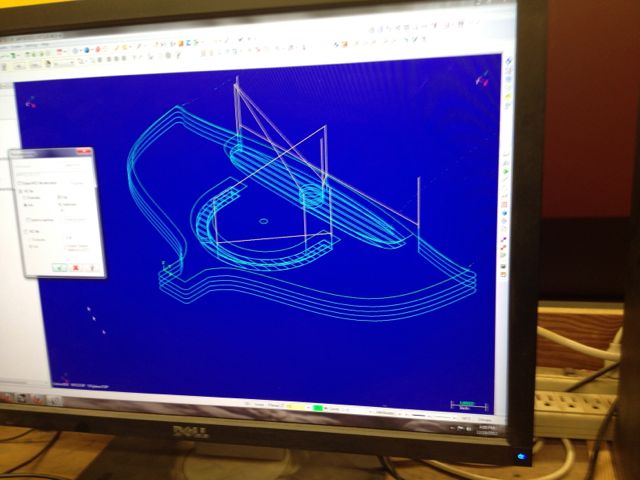
I routed the edges of the milled piece using a table router, sanded by hand, and finished using a satin urethane gel.

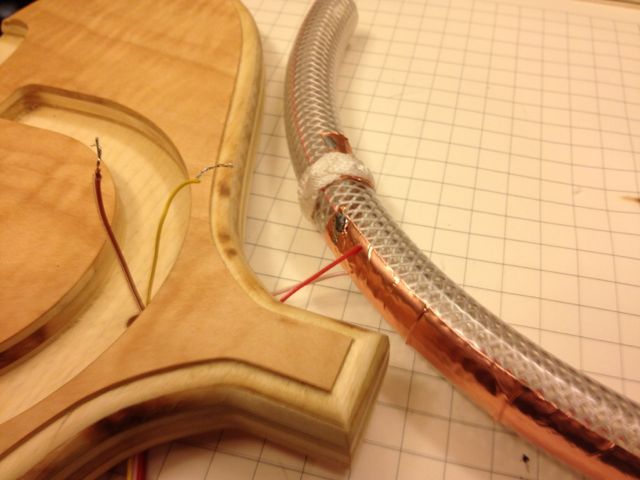

Hooked this up to the hello.txrx.45 board and it worked beautifully.
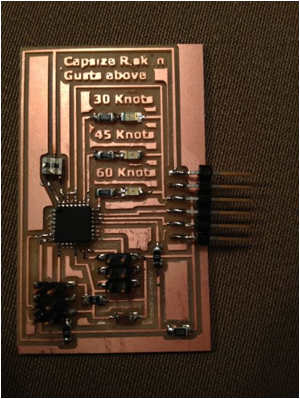
I initially planned on using a Fabduino and running an LCD, but found myself spending a lot of time troubleshooting, so I decided to use the original board I designed for use with an accelerometer. I figured it had 3 pins connected to a header, which also carried VCC and GND, so that should work. It also already carried labeled warning LEDs for the three ranges of squall condidtions
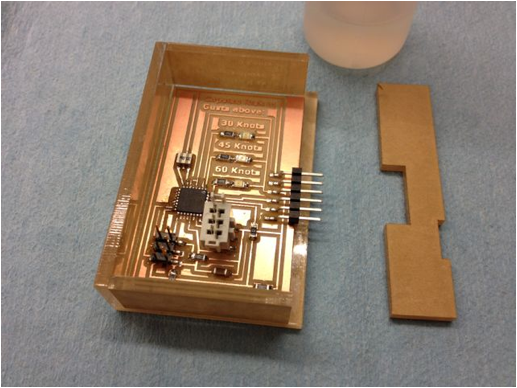
Made up an acrylic housing using the laser cutter.
Now it all hinges on the code, which I’m still troubleshooting:
// Knockdown
// Cobbled together by Simon
Colley
// This is meant to run on an
ATMEL ATMega328
#include
<avr/io.h>
#include
<util/delay.h>
#define
output(directions,pin) (directions |= pin) // set port
direction for output //this block is same as neil's,
except for the define inputs line , which I don't know whether I need
#define
input(directions,pin) (directions &= (~pin)) //
set port direction for input
#define
set(port,pin) (port |= pin) // set port pin
#define
clear(port,pin) (port &= (~pin)) // clear port
pin
#define
pin_test(pins,pin) (pins
& pin) // test for port pin
#define
bit_test(byte,bit) (byte
& (1 << bit)) // test for bit set
#define
bit_delay_time 100 // bit delay for 9600 with overhead
#define
bit_delay() _delay_us(bit_delay_time) // RS232 bit delay
#define
half_bit_delay() _delay_us(bit_delay_time/2) // RS232 half bit delay
#define
settle_delay() _delay_us(100)
// settle delay
#define
char_delay() _delay_ms(10)
// char delay
#define
nloop 100 // loops to accumulate
#define
serial_port PORTD // changed from Neil's, to suit an
ATMEGA
#define
serial_direction DDRD
#define
serial_pin_out (1 << PD1)
#define
transmit_port PORTC
#define
transmit_direction DDRC
#define
transmit_pin (1 << PC1)
#define
anemometer_port PORTC //suspect this will need to be
changed to a different port - can I have inputs and outputs at the same time?
#define
anemometer_direction DDRC
#define
anemometer1 (1 << PC0)
#define
anemometer_pins PINC
//outputs = three LEDs
#define
led_port PORTD
#define
led_direction DDRD
#define
sixty (1 << PD2)
#define
fortyfive (1 << PD3)
#define
thirty (1 << PD4)
#define
led_delay() _delay_ms(100)
// LED delay
#define
PWM_delay() _delay_ms(1000)
// PWM delay
void put_char(volatile unsigned
char *port, unsigned char pin, char txchar) {
//
// This is all straight from
Neil's hello.txrx.45 code
//
// send
character in txchar on port pin
// assumes line driver
(inverts bits)
//
// start
bit
//
clear(*port,pin);
bit_delay();
//
// unrolled
loop to write data bits
//
if bit_test(txchar,0)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,1)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,2)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,3)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,4)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,5)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,6)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
if bit_test(txchar,7)
set(*port,pin);
else
clear(*port,pin);
bit_delay();
//
// stop
bit
//
set(*port,pin);
bit_delay();
//
// char
delay
//
bit_delay();
}
int main(void) {
//
// main
//
static
unsigned char count;
static uint16_t up,down;
//
// set
clock divider to /1
//
CLKPR = (1 << CLKPCE);
CLKPR = (0 << CLKPS3) | (0
<< CLKPS2) | (0 << CLKPS1) | (0 << CLKPS0);
//
// initialize
output pins
//
set(serial_port, serial_pin_out);
output(serial_direction, serial_pin_out);
clear(transmit_port, transmit_pin);
output(transmit_direction, transmit_pin);
//
// init A/D
//
ADMUX = (0 << REFS2) | (0
<< REFS1) | (0 << REFS0) // Vcc ref
| (0 <<
ADLAR) // right adjust
| (0 <<
MUX3) | (0 << MUX2) | (1 << MUX1) | (1 << MUX0); // PC0
ADCSRA = (1 << ADEN) //
enable
| (1 <<
ADPS2) | (1 << ADPS1) | (1 << ADPS0); // prescaler
/128
//
//initialize the anemometer - This
is stuff I've added.
clear(anemometer_port, anemometer1);
input(anemometer_direction, anemometer1);
//
// initialize
the LEDs - added this also
clear(led_port, sixty | fortyfive |
thirty); // | is bitwise operation, || is logical OR
output(led_direction, sixty | fortyfive
| thirty);
set(led_port, sixty | fortyfive | thirty);
//
// main
loop
//
while (1)
{
//
// accumulate
//
up = 0;
down = 0;
for (count = 0; count < nloop;
++count) {
//
// settle, charge
//
settle_delay();
set(transmit_port, transmit_pin);
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
up += ADC;
//
// settle, discharge
//
settle_delay();
clear(transmit_port, transmit_pin);
//
// initiate conversion
//
ADCSRA |= (1 << ADSC);
//
// wait for completion
//
while (ADCSRA & (1 << ADSC))
;
//
// save result
//
down += ADC;
}
//
// send framing
//
put_char(&serial_port,
serial_pin_out, 1);
char_delay();
put_char(&serial_port,
serial_pin_out, 2);
char_delay();
put_char(&serial_port,
serial_pin_out, 3);
char_delay();
put_char(&serial_port,
serial_pin_out, 4);
//
// send result
//
put_char(&serial_port,
serial_pin_out, (up & 255));
char_delay();
put_char(&serial_port,
serial_pin_out, ((up >> 8) & 255));
char_delay();
put_char(&serial_port,
serial_pin_out, (down & 255));
char_delay();
put_char(&serial_port,
serial_pin_out, ((down >> 8) & 255));
char_delay();
}
// get
anemometer values
//
//think
if
wind = 10 and angle = 5
or if wind = 12 and angle = 10
or if wind = 16 and angle = 15
or if wind = 18 and angle = 20
or if wind = 20 and angle = 25
or if wind = 22 and angle = 30
then
clear(led_port,sixty); //otherwise
turn it on!
PWM_delay();
set(led_port,sixty); //turn off
else
if wind = 15 and angle = 5
or if wind = 20 and angle = 10
or if wind = 24 and angle = 15
or if wind = 27 and angle = 20
or if wind = 30 and angle = 25
or if wind = 32 and angle = 30
then
clear(led_port,fortyfive);
//otherwise turn it on!
PWM_delay();
set(led_port,fortyfive); //turn
off
else
if wind = 15 and angle = 5
or if wind = 20 and angle = 10
or if wind = 24 and angle = 15
or if wind = 27 and angle = 20
or if wind = 30 and angle = 25
or if wind = 32 and angle = 30
then
clear(led_port,thirty);
//otherwise turn it on!
PWM_delay();
set(led_port,thirty); //turn
off
}