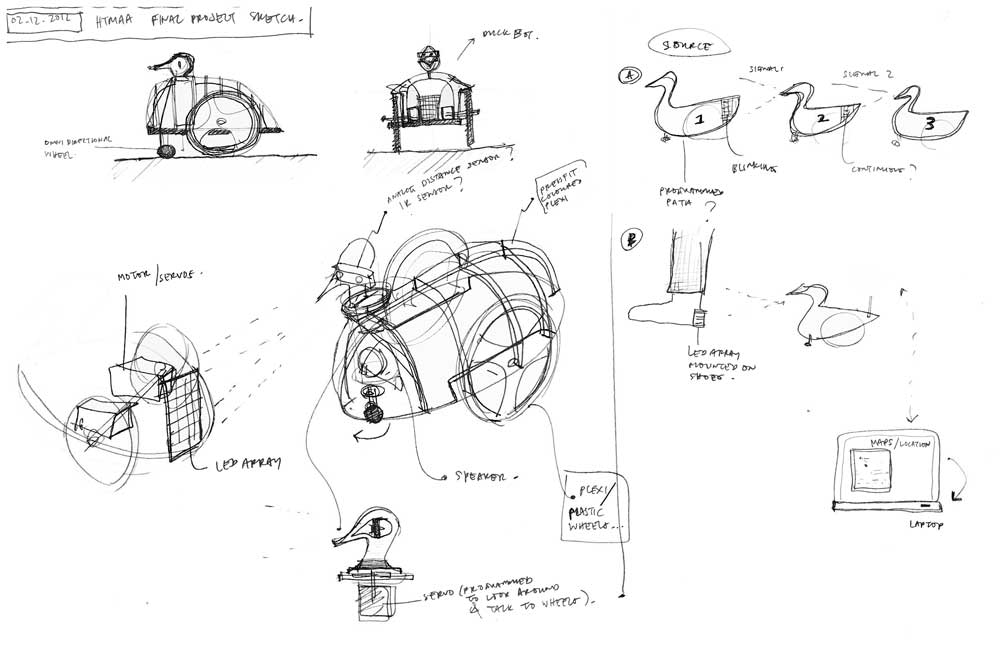
Quick Studies of Kits and Parts of the Duck-Bot
For my final project, I'm trying to stick to my initial proposal to create a set of, at least, two robot-ducks that interact with each other. An idea is based on the Make Ways for Ducklings story, where each of the nine ducklings marches behind every other one while they all follow Mama Duck. The robots I plan to make will represent the same concept of one thing that influences another around it.
Practically, this could be potentially applied to spatial planning, where you have to re-adjust walls and furniture constantly, depending on the programming of the space, e.g. what if your dining chairs can move around or readjust themselves when the main table is shifted to another location, or what if paintings on the walls can be regrouped according to the space user's personal interest, etc.
Alternatively, I may just concentrate on making one robot that can sense its environment and feeding the information back to the computer.
The ambition is to combine the various skill sets that we've learnt in this class, and in an ideal situation -- where I have all the time in the world, I'll make ten duck robots!
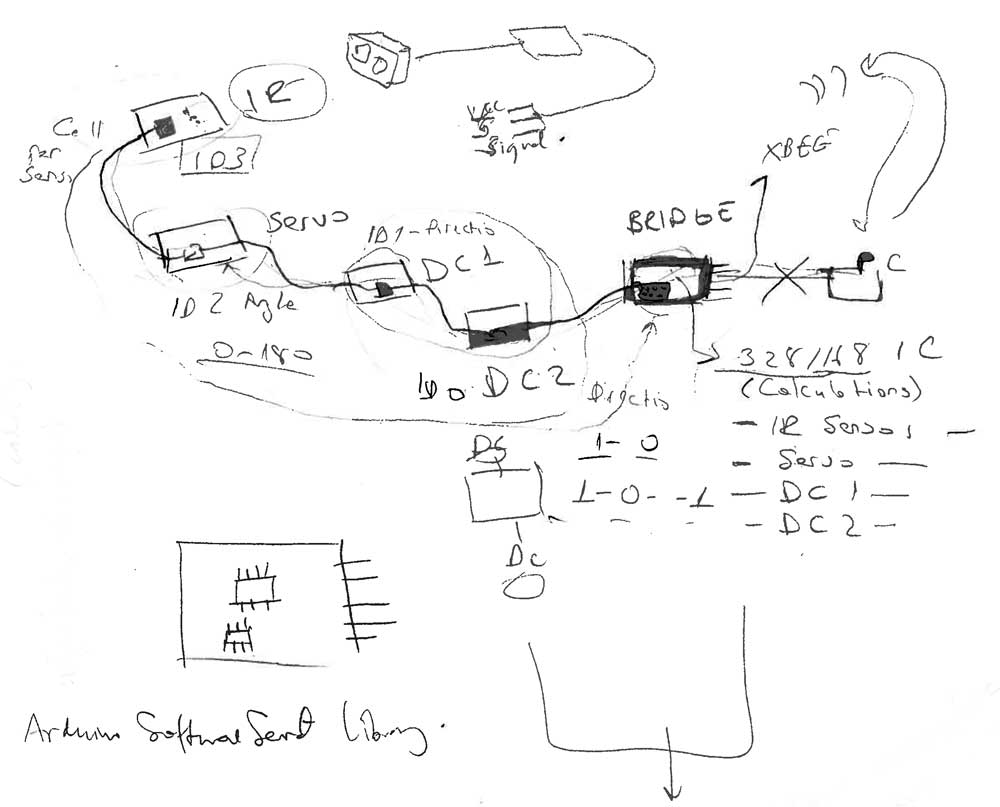
Sketch of Bus Connection to Test
A few things to test incrementally:
-Test wheels movements: Stepper or DC.-Test communications between IR-sensor and Bus Bridge / FabDuino.
-Test communications between IR Sensor, Motorised Wheels, and Speaker.
-Test Interface Tracking Device (XBee).