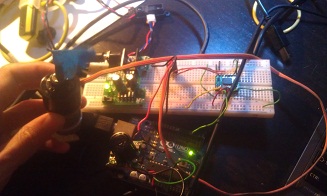
When the sensor detects an
object at the proper distance, it will move the motor to shoot the nerf
dart. Instead of creating a custom board, I decided to
breadboard the set up first to make sure the sensor has sufficient
range. I used an Arduino board for this since it is the same
family as the ATTINY chip.