My
final project was inspired by my dog who can't stop jumping on the sofa
or the bed. My goal is to use a sensor to detect when she's in a
spot she's not suppose to be in, and frighten her off.
I had
planned to use a PIR sensor initially, but it turned out to be too
senstitive. Essentially, it will go off anytime there's motion in
the room, not just a certain area. So I decided to use an
ultrasonic sensor instead, and look for an "obstacle" in a certain area
by detecting a change in the range. I used the EZ-1 ultrasonic
sensor which has a range of 6.45m.


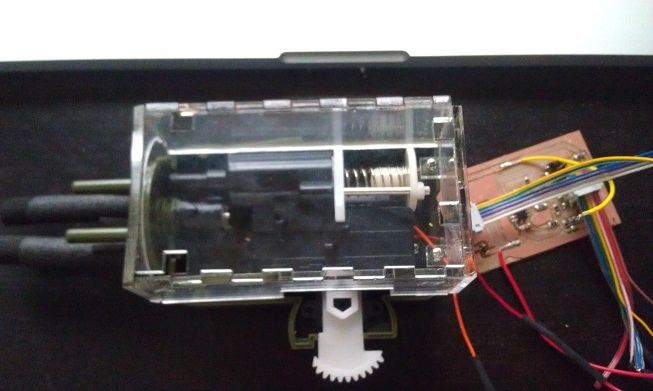
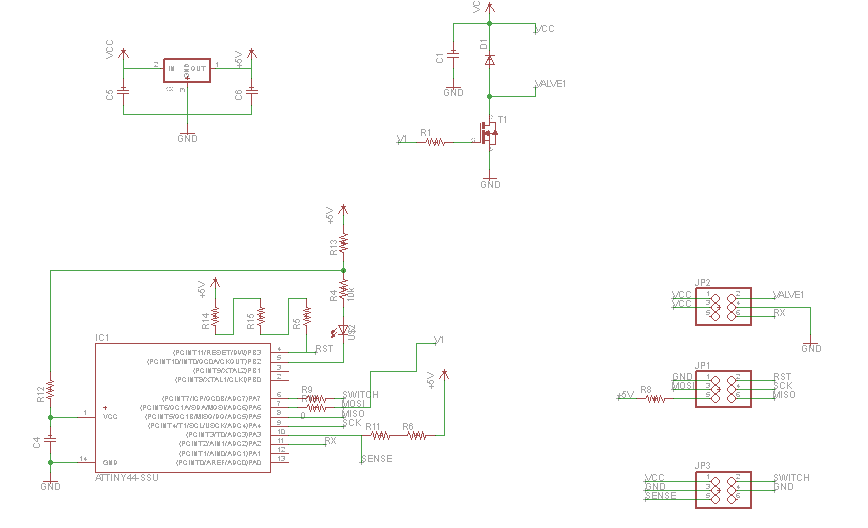
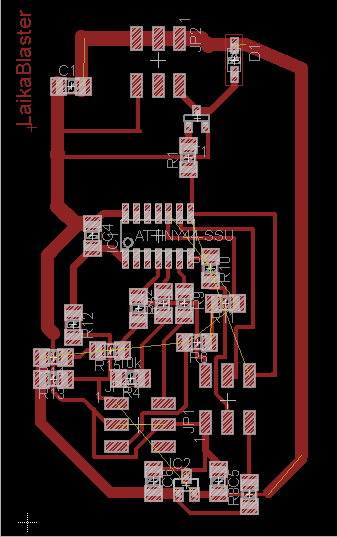
I
created a schematic to capture the sensor signal and to drive a DC
motor. My plan was to reuse the motor in an existing USB turret,
and integrate the sensor with it by driving the motor when the proper
signal is detected. The DC motor is driven through a MOSFET
circuit.

I was able to control the motor with the sensor with this setup.
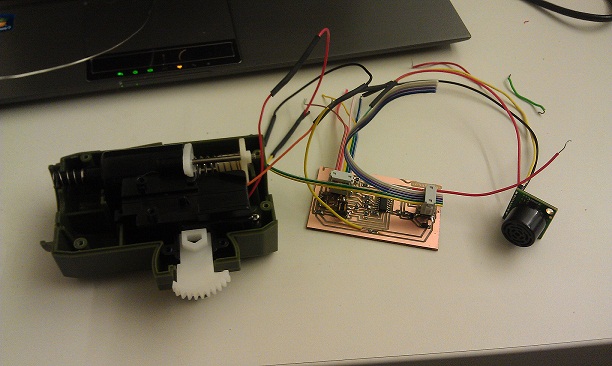
However,
after a few tries in using the motor (possibly because I ran it
continuously connected to a power supply), the gears had trouble
converting the motor's rotation into linear actuation.

I will have to go back to replace the gears.