My objective for this course is to (design) and build a fully functional On Orbit Space Assembler, whose initial design, mechanics, and contols were breifly investigated and tested over the summer duing my internship at NASA Ames Research Center.
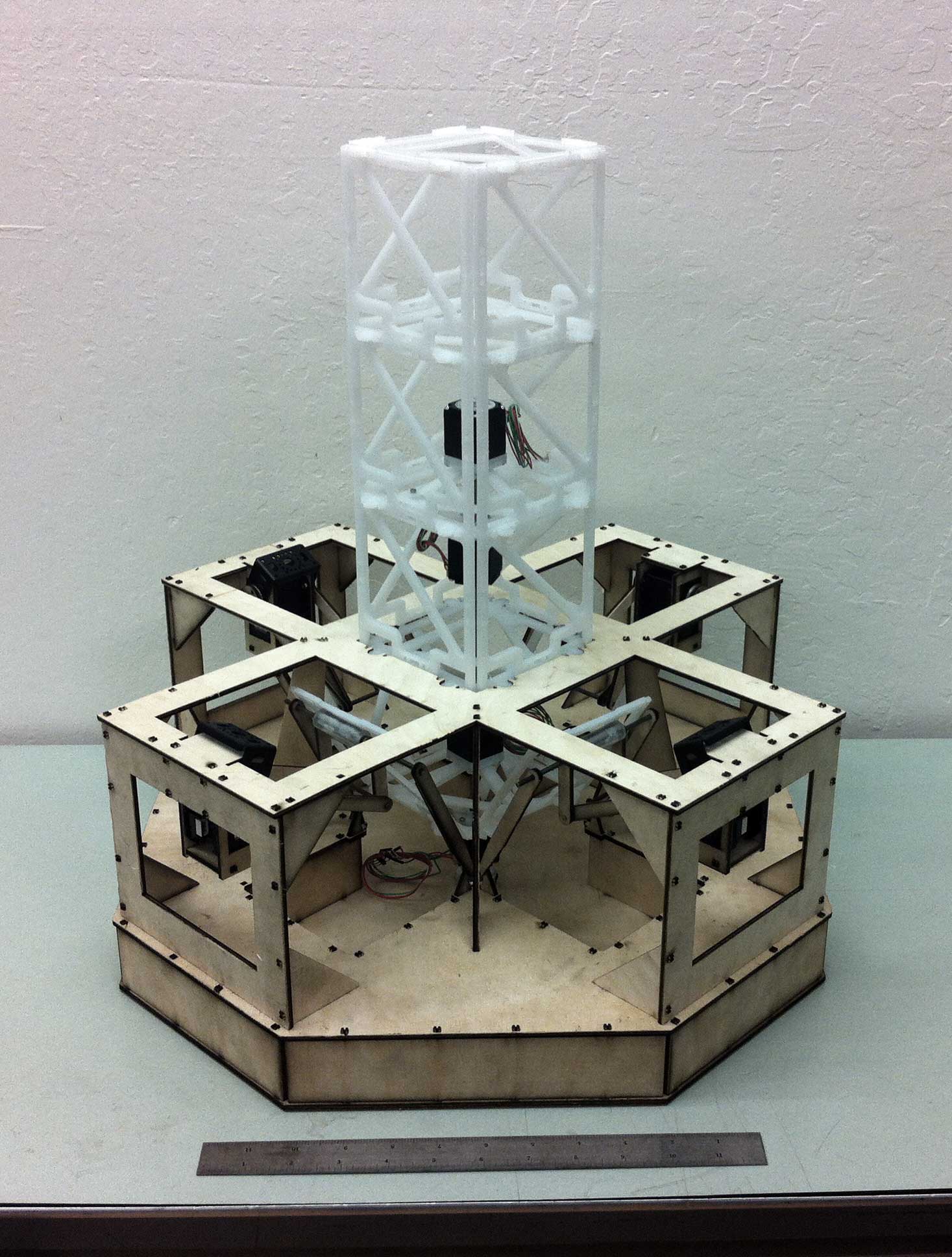
beta prototype
lasercut plywood (Universal laser)
2.5d milled milled HDPE panels (Shopbot desktop)
dynamixel servos
haydenkirk linear actuator stepper motors
snap fit construction for frame
(modeled in Rhino, simulated in grasshopper)
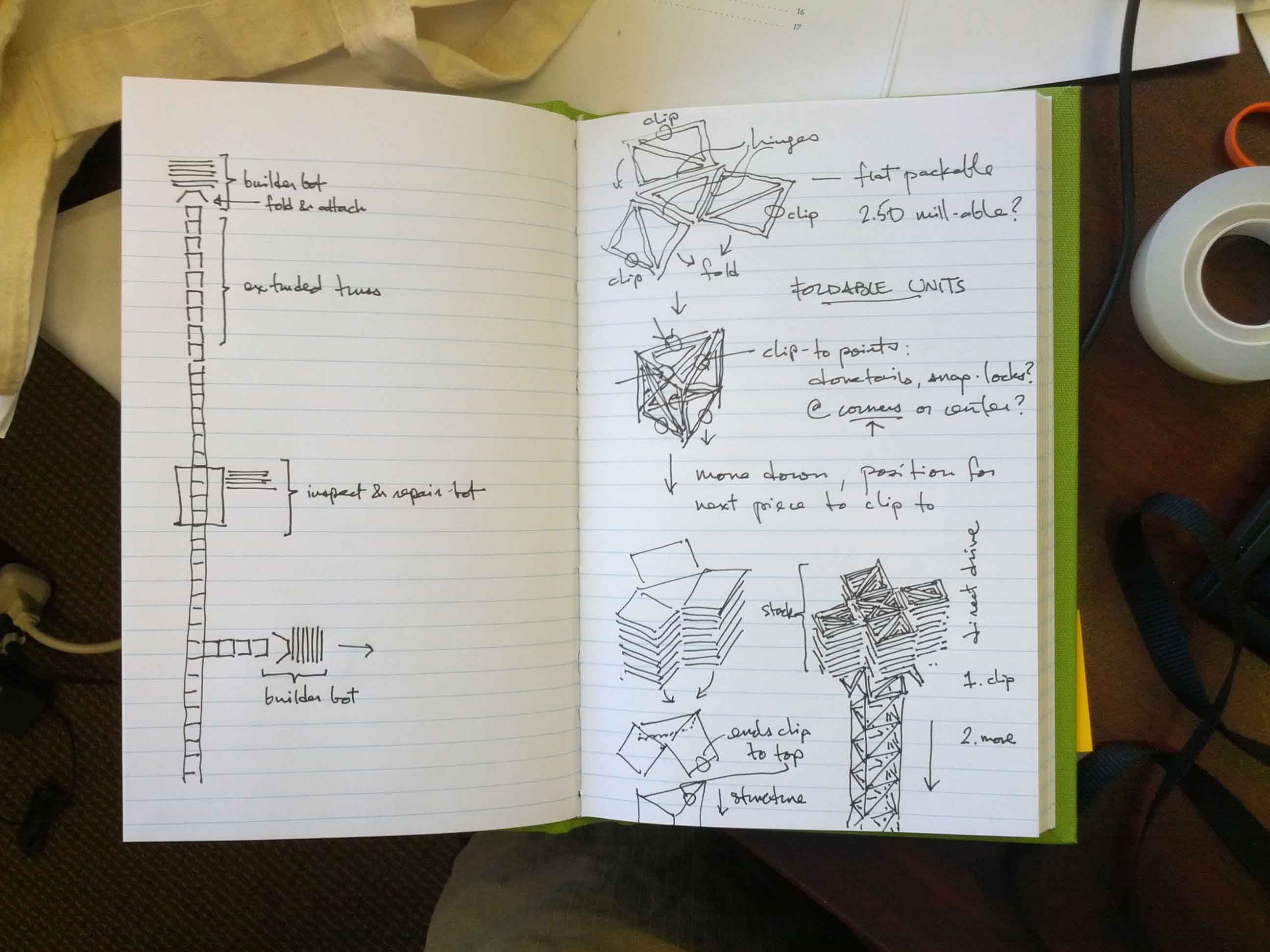
original sketch (by K. Cheung-NASA ARC)
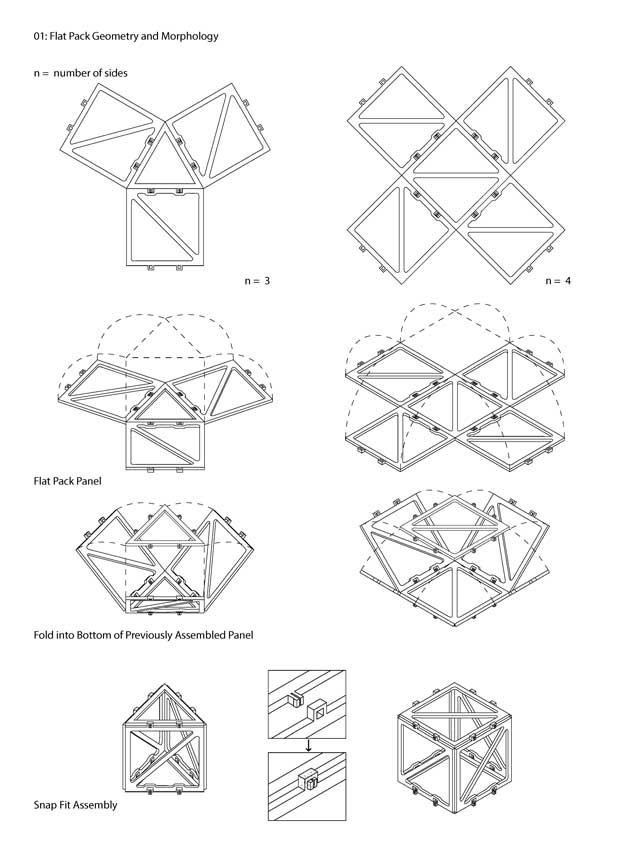
development of flatpack parts and assembler
(modeled in Rhino>make2d>export to Illustrator as .ai)
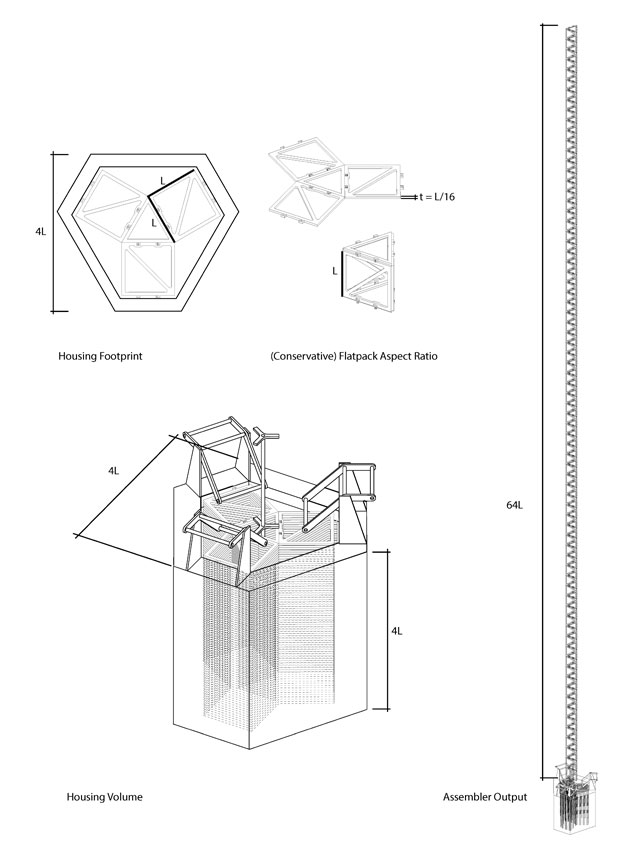
beta beta assembler design
(modeled in Rhino>make2d>export to Illustrator as .ai)
beta beta assembler animation
(modeled in Rhino>animated in grasshopper)
Beta Version
The main driver for the next iteration was optimizing the mechanism- we discovered a torque limitation in the servos that drove the arms.
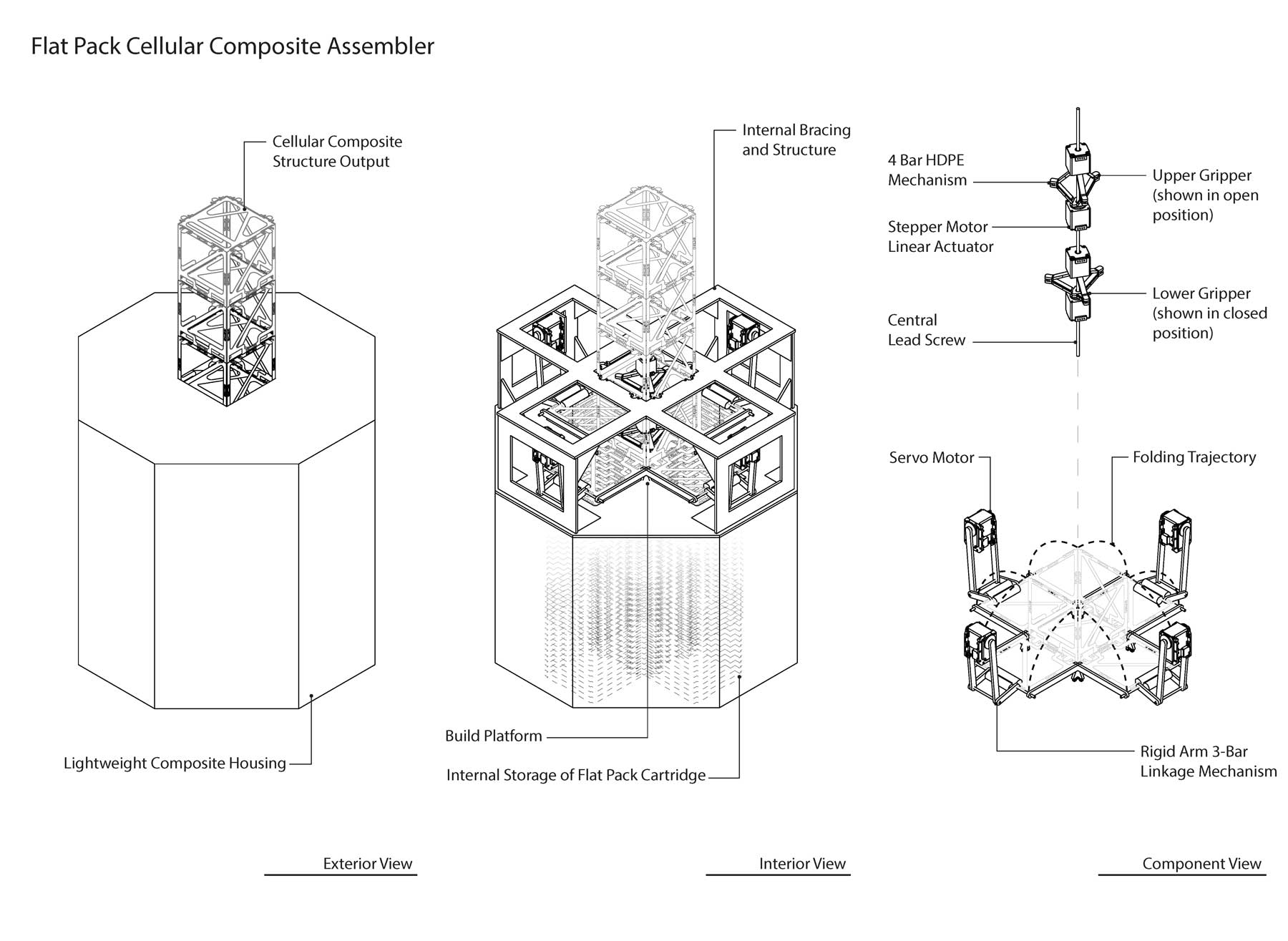
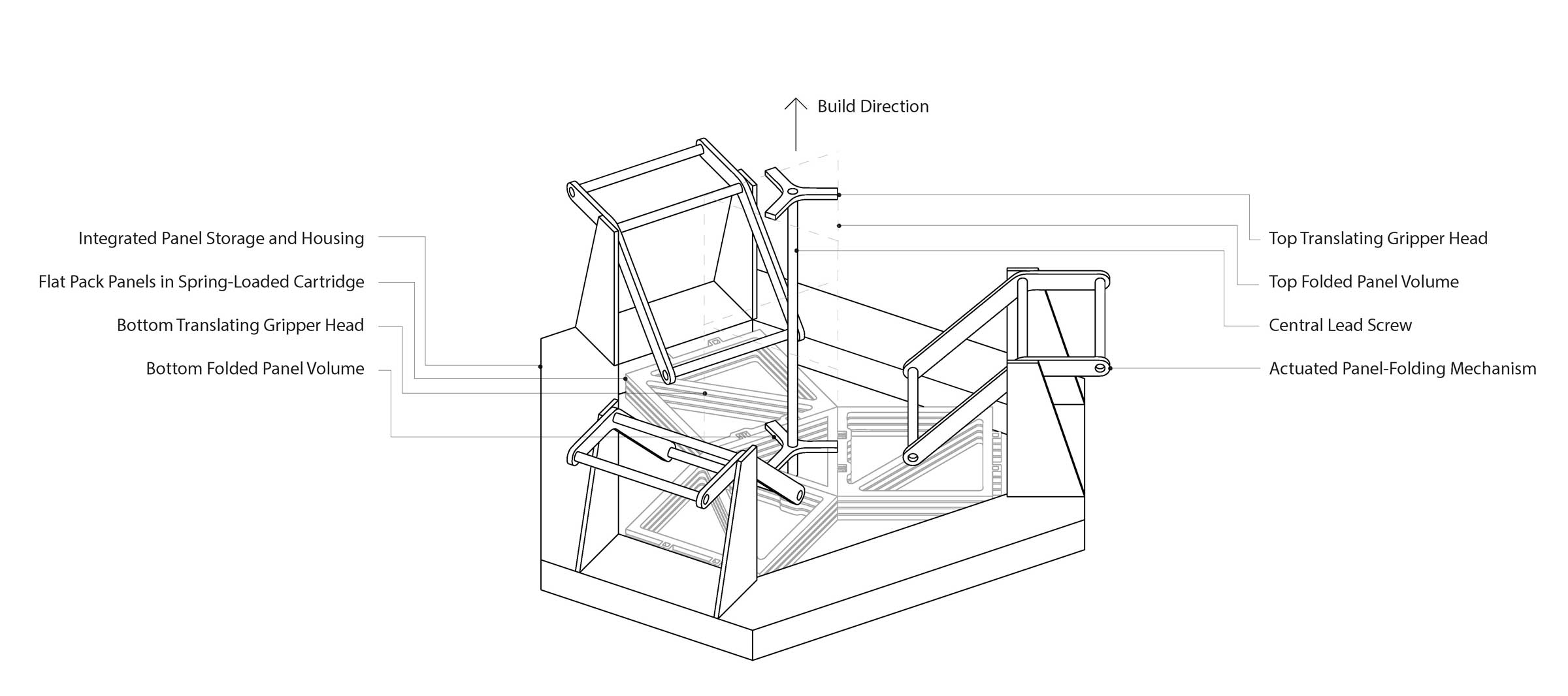
beta assembler diagram
(modeled in Rhino>animated in grasshopper)
beta assembler animation
(modeled in Rhino>animated in grasshopper)

tower assembly
(modeled in Rhino>animated in grasshopper)

3d cube assembly
(modeled in Rhino>animated in grasshopper)

ISS assembly
(modeled in Rhino>animated in grasshopper)

SS-5 assembly
(modeled in Rhino>animated in grasshopper)
future work: volumetric assembly
(modeled in Rhino>animated in grasshopper)