I've been dreaming about this for a while now. Here are some sketches of what I want to accomplish.
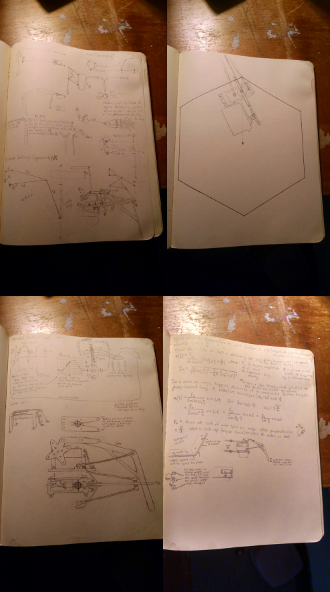
Clockwise, from top right: Burmester linkage leg design; a single leg on the hexagonal body, to scale; some resonance-related mathematics of questionable utility; a combined top/side view of the leg mechanism with servo.
The legs will be Burmester straight line linkages, so that the whole body can translate downward along a straight trajectory. This degree of freedom will be the spring-loaded degree of freedom.

I used Linkage, a free 2D CAD package for visualizing and designing planar linkages, to model my Burmester straight line linkage.
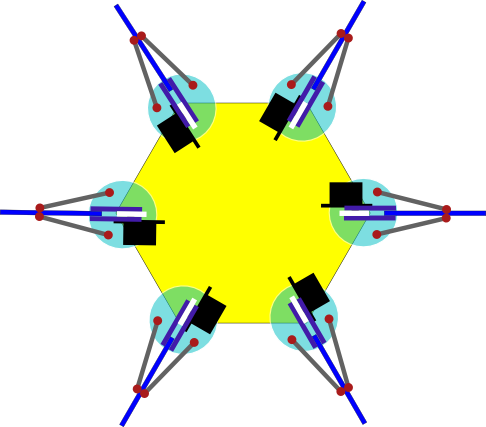
Inkscape overhead view
I did my best to make a model to scale in Inkscape, which provides some insight into the constraints which the joints will need to satisfy so that they do not collide with each other.
Next week: Press fit design! Maybe I will be able to use press-fit components to simplify the construction of these relatively complex legs. Otherwise, fastener placement will become a major roadblock.