Week 10 - Output Devices
Controlling a DC MotorI spent the majority of this week starting to plan ahead towards my final project. My final project will involve electrically driving a strong motor (probably greather than 200W), so most of my work this week was devoted to figuring out the parts I'll need, which motor to choose (brushed vs brushless, specs), how to develop the circuit for it, etc ...
A very nice intro. website I found had the following diagram, making it clear what the purpose of the controller is (to.. ehm.. control) the motor, while the driver circuit is the one translating those signals to a high-power output that actually drives the motor.

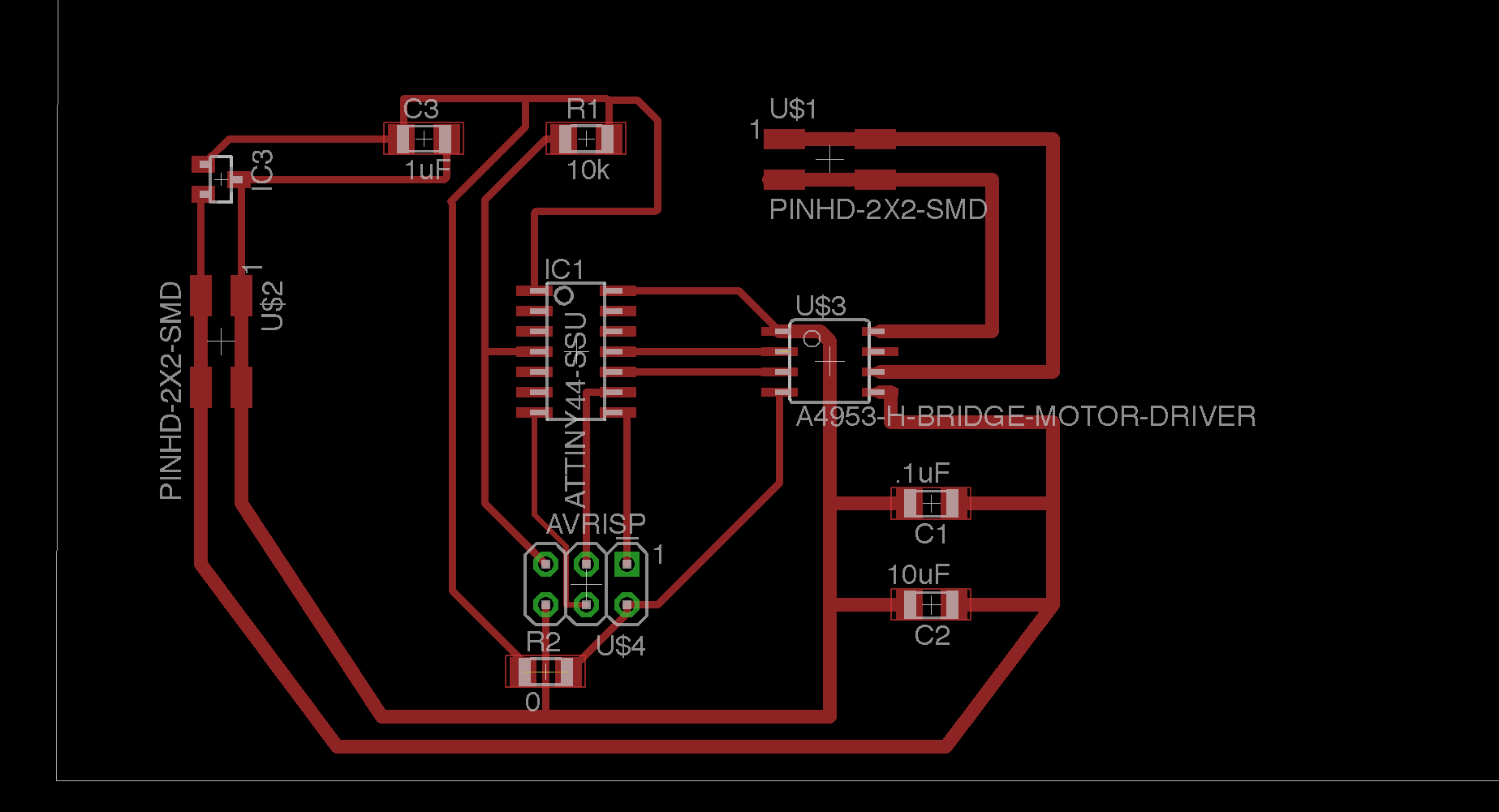
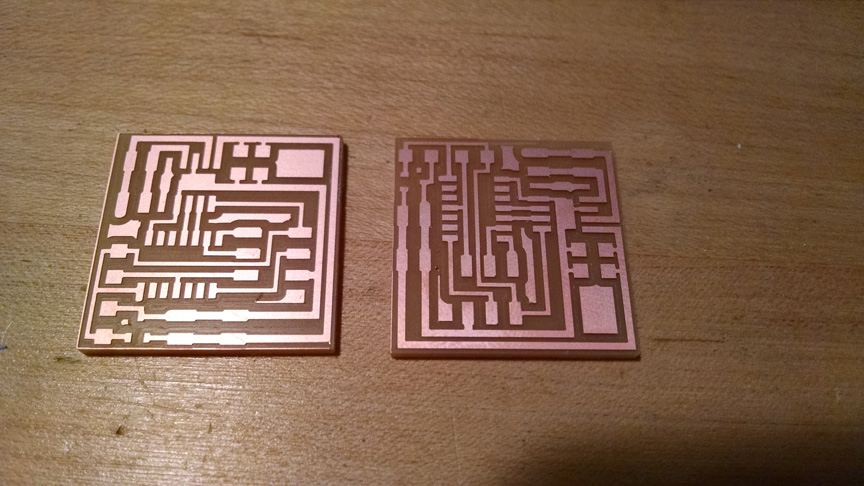
Beyond reading a lot, I decided as a practice to recreate the DC Motor circuit (H-Bridge) showed in class. Here's the board layout:
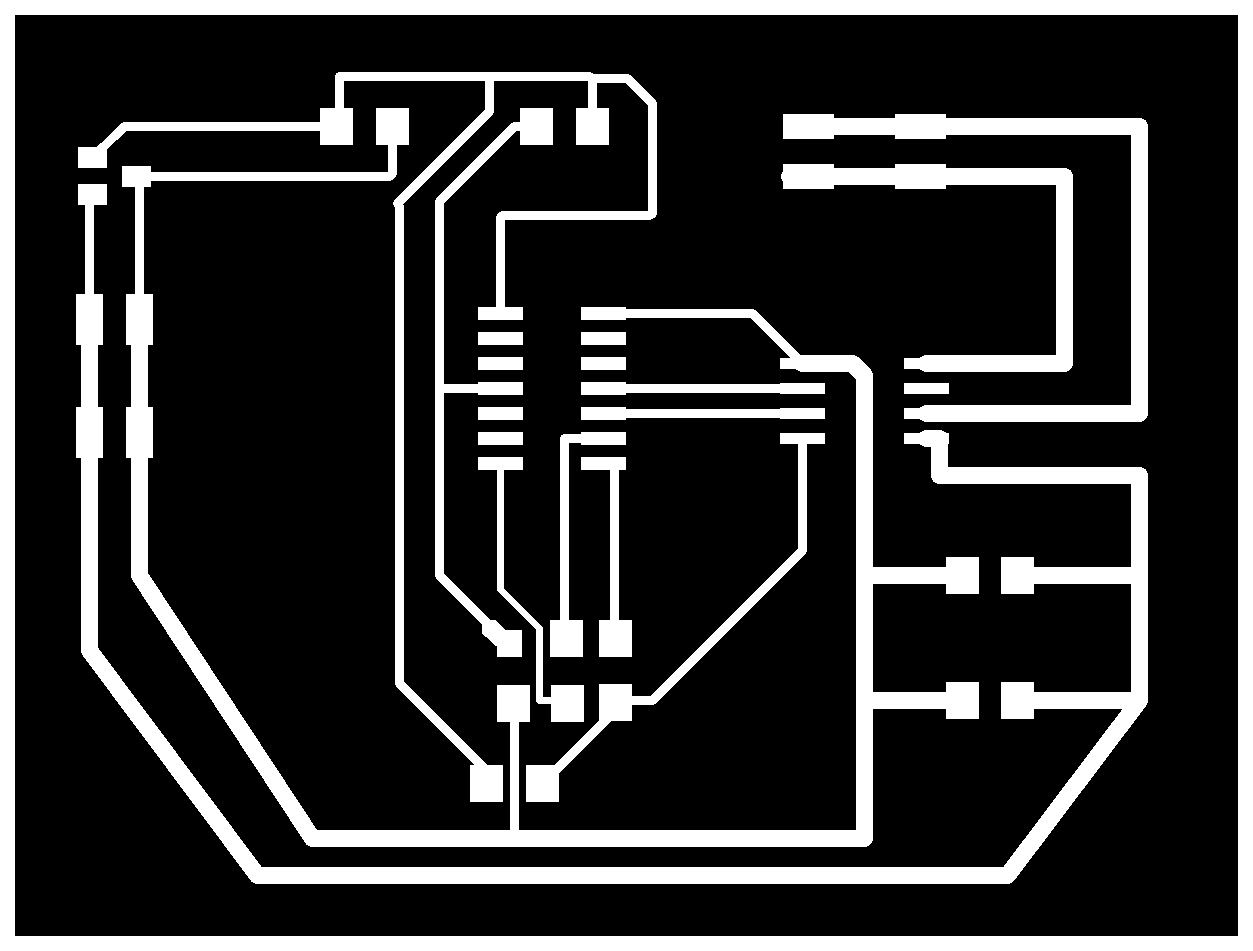
And the traces:
Milling the board:
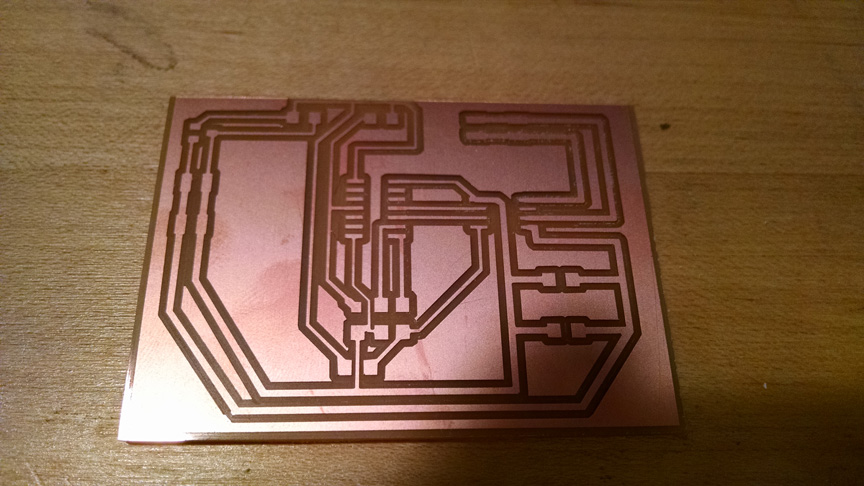
I had a small short in the milled circuit, so before hacking into it, I decided to also mill two instances of Neil's board. My goal was to later fix my board's design (or change the modella parameters) to remove that short.
I then decided to get the reference board working and went ahead to stuff it:
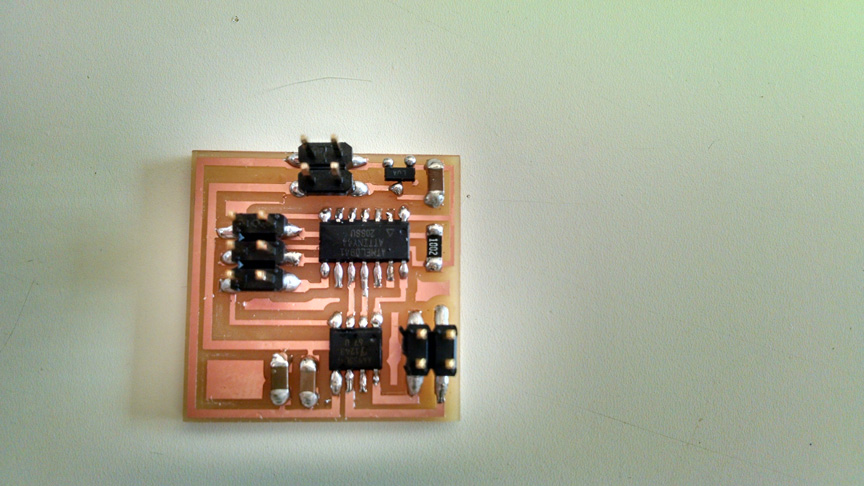
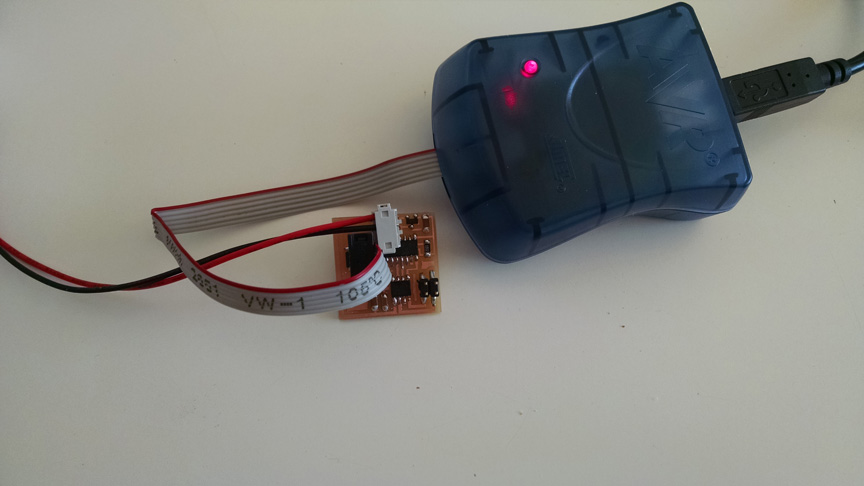
The board then failed to program. I checked the board carefully with a multimeter to see that nothing is out of the ordinary.
I then noticed that the programmer's LED is not green at all, hinting that the power supply is not good (since I verified the connection). I tested the voltage across the two 9V batteries left in the shop and there was the problem - they were pretty much dead, showing a voltage of approx. 1V-1.5V.
Since there were no further batteries at the shop and I preferred to use this week's assignment time to do research for the *real* output device I'll be needing for my project, I didn't pursue this board further, but I did learn a lot from this assignment!
Neil rightfully commented in class that week that I should use the PSU at the shop. I did that, and was able to drive the DC motor. I also later on designed a similar circuit to drive a Servo, since I decided that my final project will have an intermediate ESC that can be controlled with a PWM signal (like a servo).