The assignment for this week was to build a machine. Luckily, this was a group project, so we had a whole team to tackle the various problems that come up with machine building.
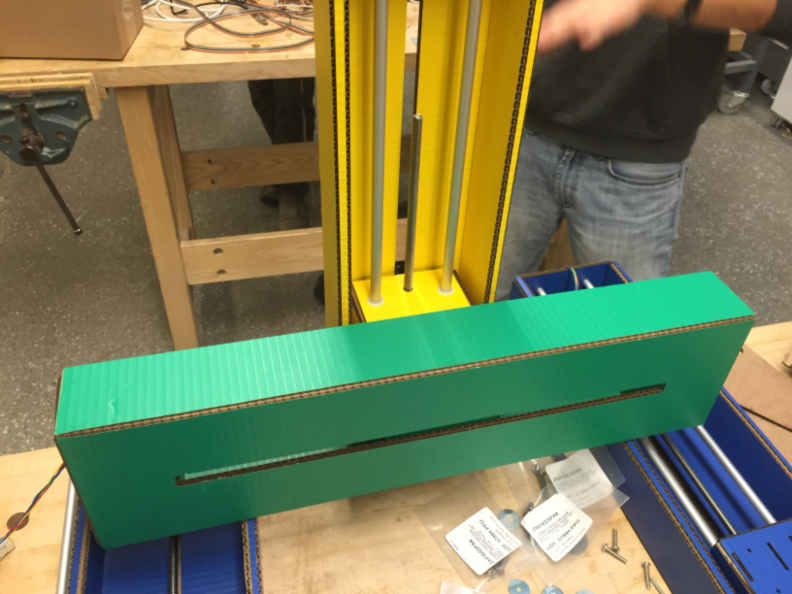
My group decided to build a “magic” chess board – a chess board that could automatically move pieces by using a magnet on the end of a 3-dimensional tool path. My team did a great job of building a very sturdy 3-axis machine:
 |
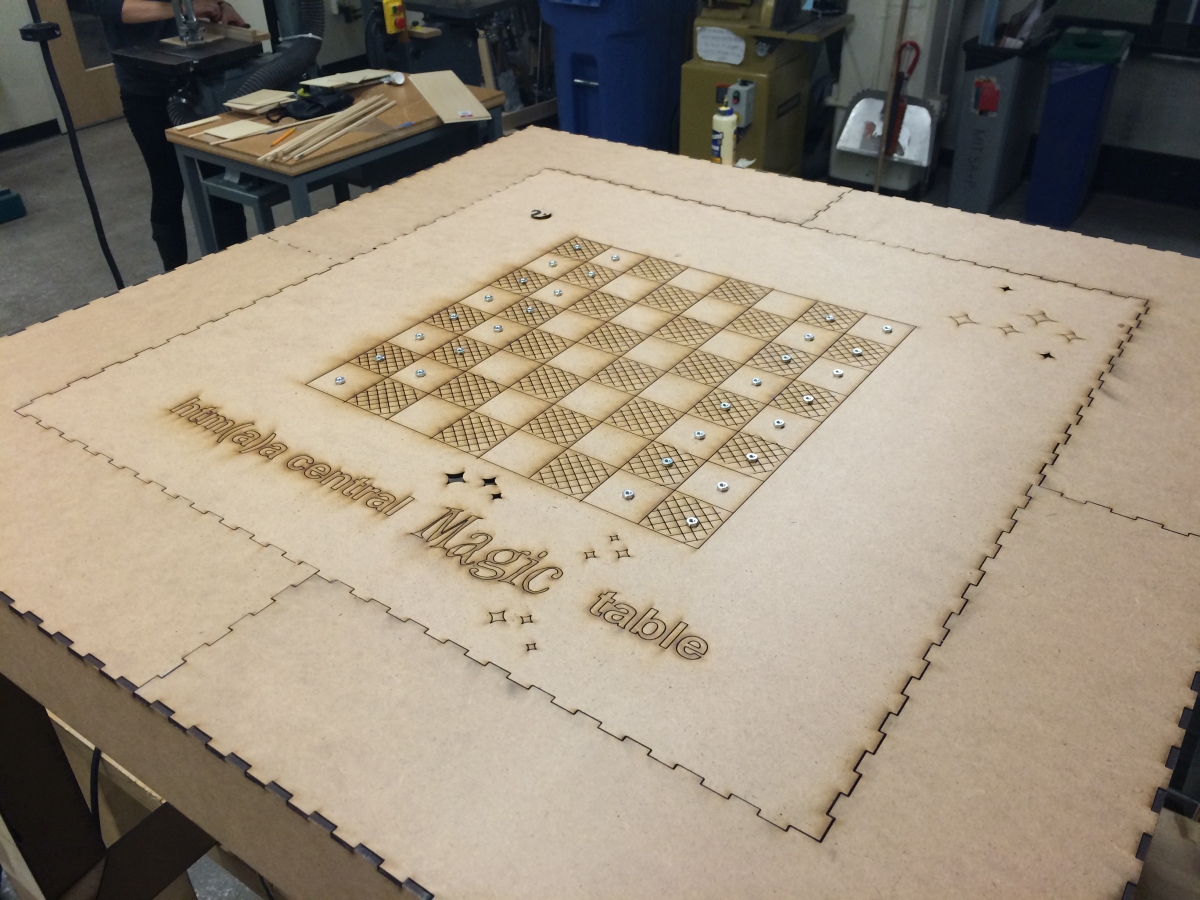
And we have some amazing artists who created the chess board itself and the chess pieces:
 |
 |
Coding
My role in the assignment was to code the tool path for the machine and the GUI that we used to control the chessboard. We used the Gestalt framework for sending (x, y, z) commands to the motor controllers. My only job was to send a tool path to the Gestalt nodes and create a GUI that could control the pieces.
Controlling a Gestalt machine in Python looks like this:
# setup:
self.xaAxisNode = nodes.networkedGestaltNode('XA Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.xbAxisNode = nodes.networkedGestaltNode('XB Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.yAxisNode = nodes.networkedGestaltNode('Y Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.zAxisNode = nodes.networkedGestaltNode('Z Axis', self.fabnet, filename = '086-005a.py', persistence = self.persistence)
self.xyzNode = nodes.compoundNode(self.xaAxisNode, self.xbAxisNode, self.yAxisNode, self.zAxisNode)
# moving:
self.stages.move([x,y,z], 0)
I found an exiting Python chess GUI and called a “move_piece” function whenever a piece was moved
# seq is a sequence of (x, y) coordinates to move along
def move_piece(self, seq):
(xFirst, yFirst) = self.transform_pos(seq[0])
self.move([xFirst, xFirst, yFirst, 15]) # move to the starting position
for move in seq:
(x, y) = self.transform_pos(move)
self.move([x, x, y, 0]) # move along the path
(xLast, yLast) = self.transform_pos(seq[-1])
self.move([xLast, xLast, yLast, 15]) # move down away from the pieces
And there were special cases for capturing pieces and moving knights.
Here is a video of the whole machine working together:
All in all, I was really happy with the final outcome. It was a lot of fun to work with the whole team!