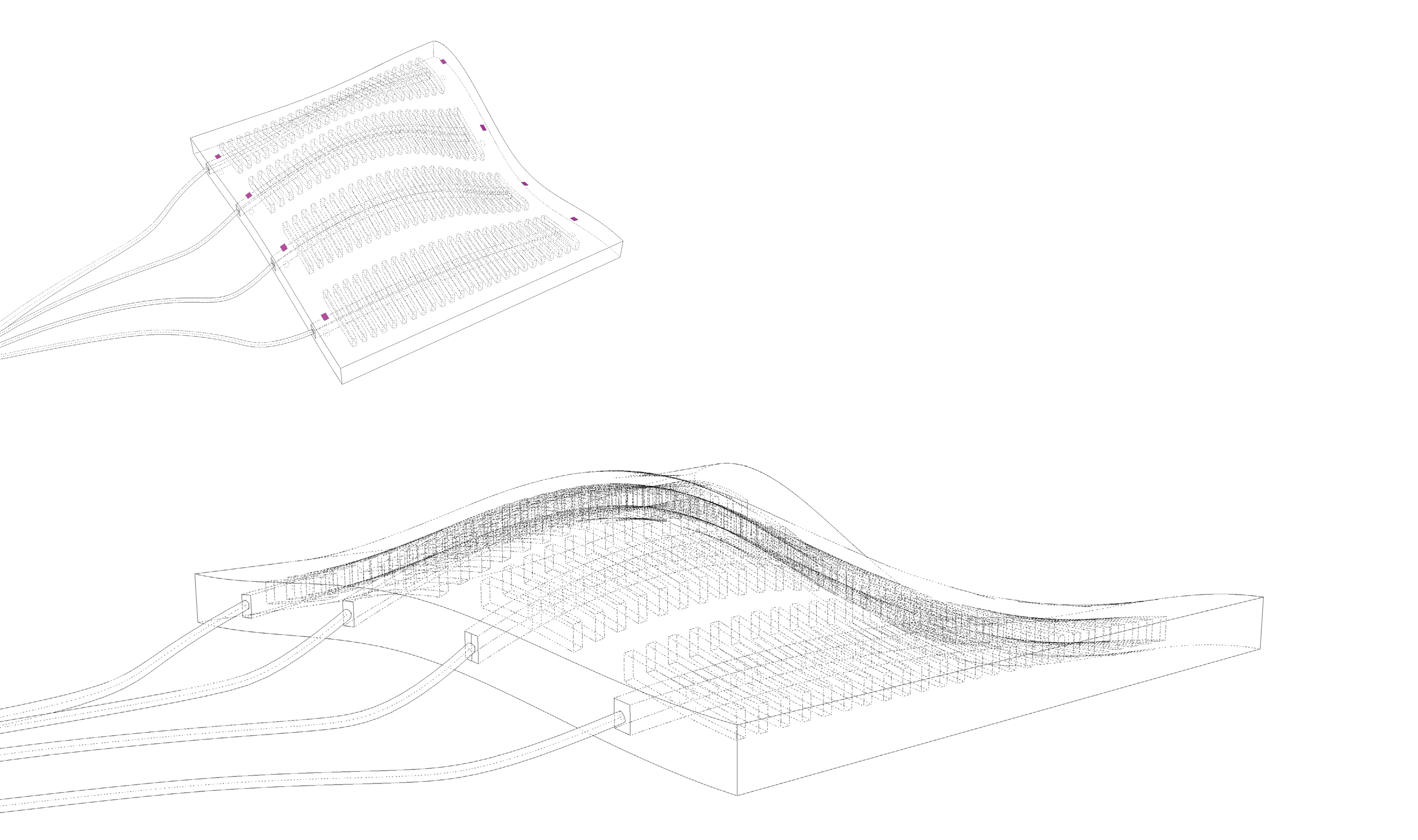
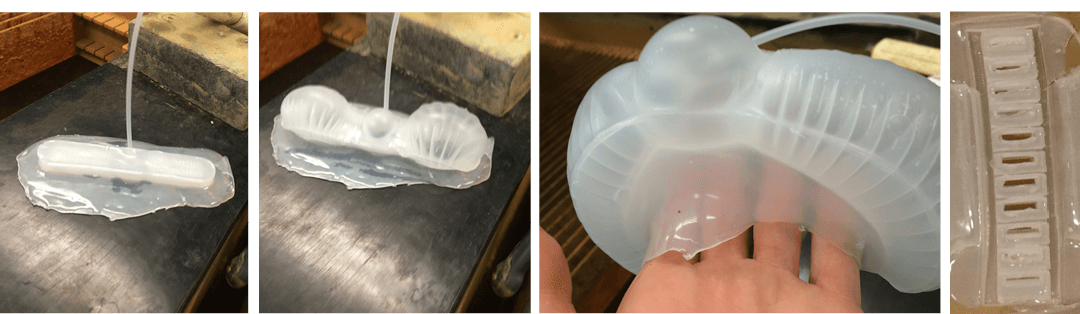
An Inflatable surface or some kind of soft robotic arm (still working on the design and geometry) , made from Soft Pneumatic Actuators. The technique is similar to the one being used in the Harvard soft robot project (Molding and casting of rubber)
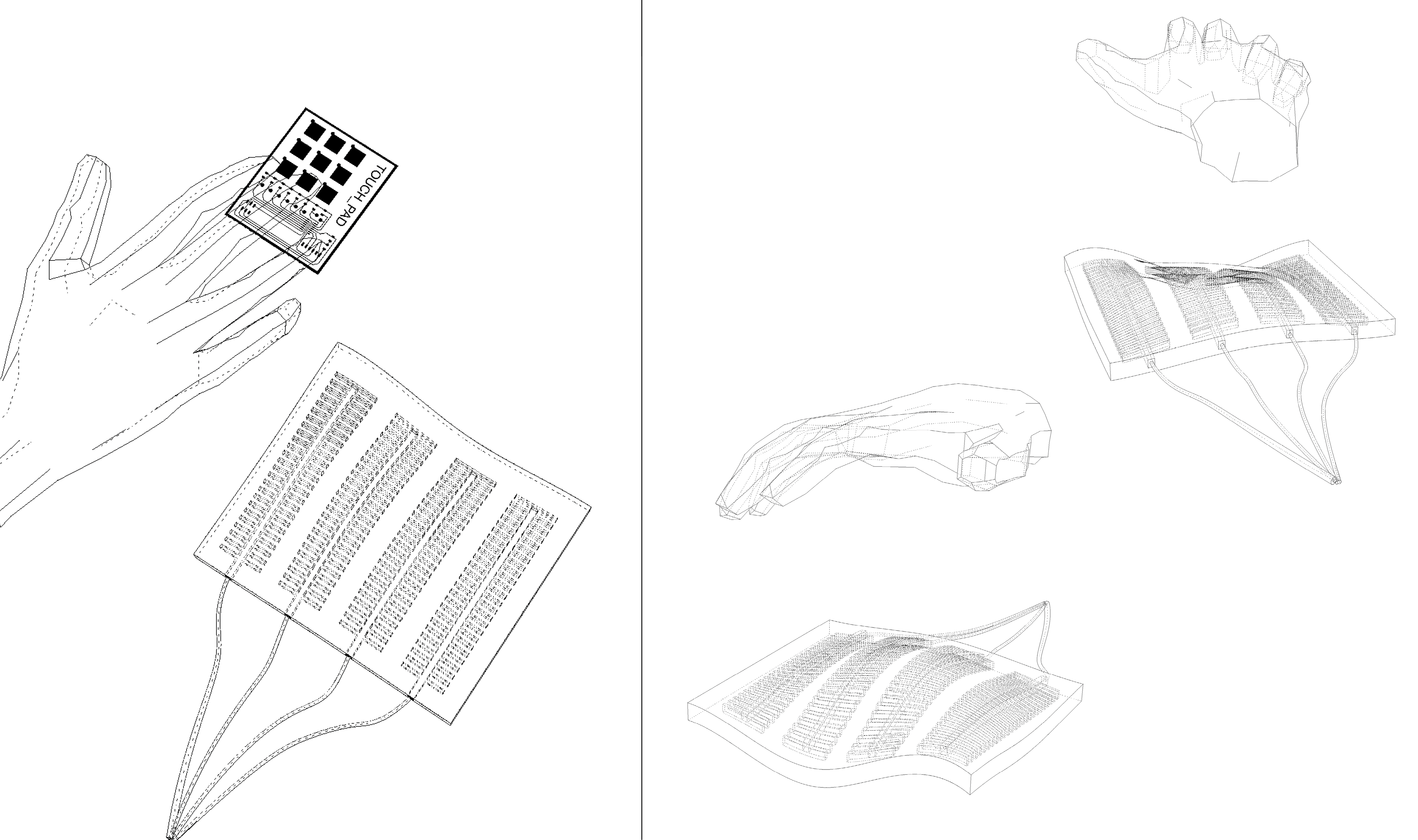
Controlled by hand gestures or by the touch_pad I made for input_devices week
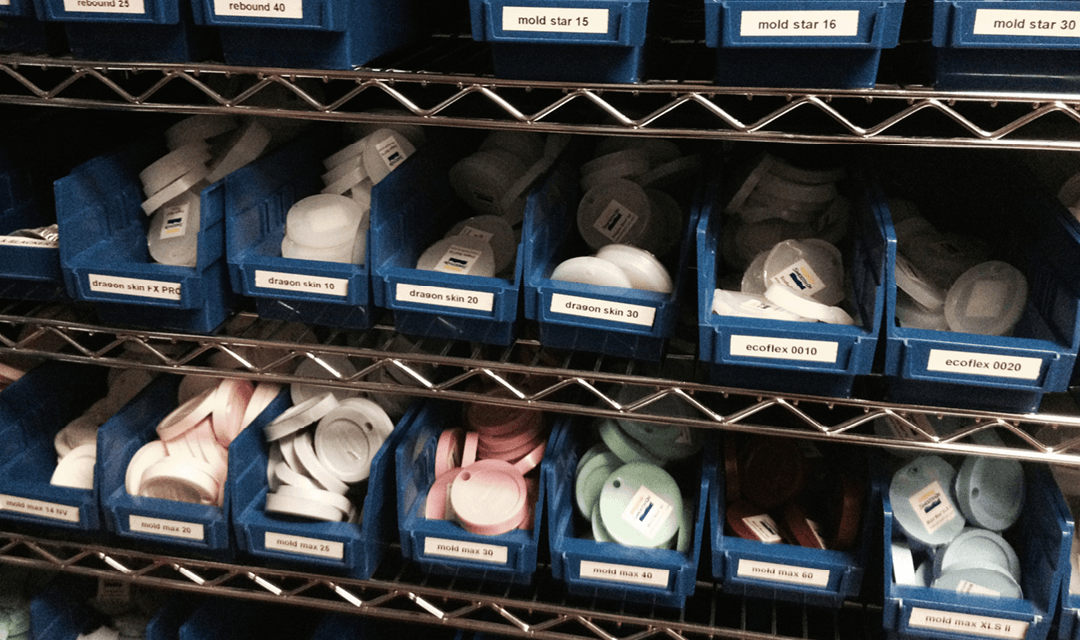

Choosing materials
Testing the material and different geometries. I tried to use Ecoflex and Dragon skin. Finally, I choose Ecoflex, because it was less stiff then the Dragon skin, and therefore easier to pump. I also preferred the 'feel' of the Ecoflex.

More updates and documantation next week!