Week 11: Output Device
In the output devices week, I decided to make a servo motor board.
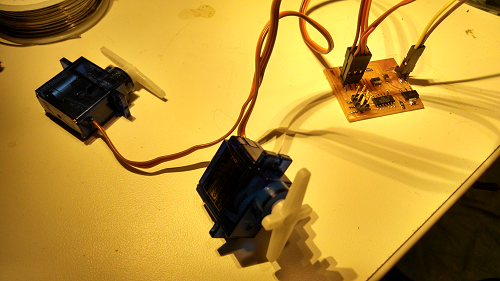
I made a servo motor circuit, and made two servos rotate using software PWM.
Schematics
I used Eagle and followed Neil's component arrangement closely to make my own servo motor driver circuit.
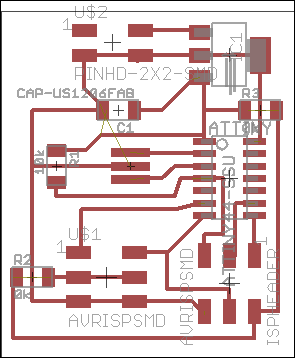
The circuit uses some 0 ohms resistors as jumpers, as my routing was a little different from Neil's. This was mostly to allow a thicker trace on my board.
Board Preparation
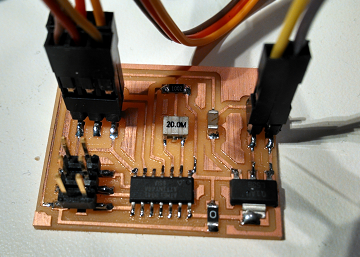
Using the Modela, I milled the board without any problem. Over the weeks, I became a better operator of this machine! Next, I stuffed all the components.
Programming
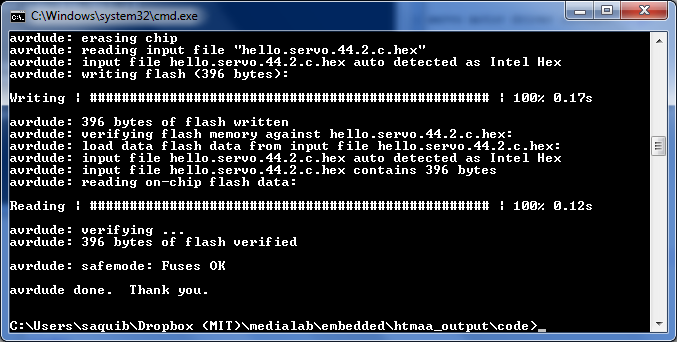
I used the two channel software PWM C code and played around with it to get different movements.
And it works!
Following is a link to a video showing the driver board in action.