Final Project Idea: A Footloose Gnome
For my final project, I would like to build a gnome that will want to go explore cambridge and boston.
I am interested in building a autonomous robots that can experience the world and create their own stories. With the current state of robotics, this is a difficult feat to pull off outside a lab environment. However, there is hope: it turns out that people are willing to help a robot out. Tweenbot, a cardboard robot, managed to cross a park in New York with help from passer-bys. Very recently, hitchBOT, hitchhiked across canada.

Another source of inspiration for the project, is the travelling gnome prank, where pranksters "liberate" a garden gnome from someone yard and take it for a tour around famous sites while sending pictures of the gnome at these destinations back to the original owner. The pictures create a story as if the gnome is interested in being at these locations.

What I would like to do is to have a gnome that is exploring the world. It asks the passer-bys to carry it with them. If they do, the gnome may choose to stay there for a bit or go to another place. Where the gnome chooses to go is up to it but based on its experiences so far.
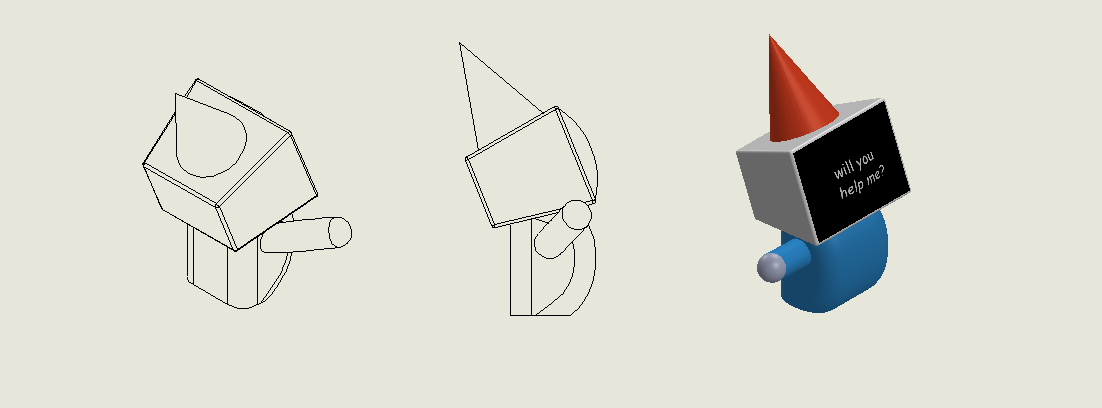
I imagine the gnome to look a bit like a garden variety gnome with a display for a head. The display will show messages such as "will you help me?" to solicit passerbys. When the gnome is picked up it senses the motion with an accelerometer and asks the person to take it to somewhere, either wherever the person is going, or to somewhere the gnome wants to go. It might also ask the person to take a picture of it and email it to an address.

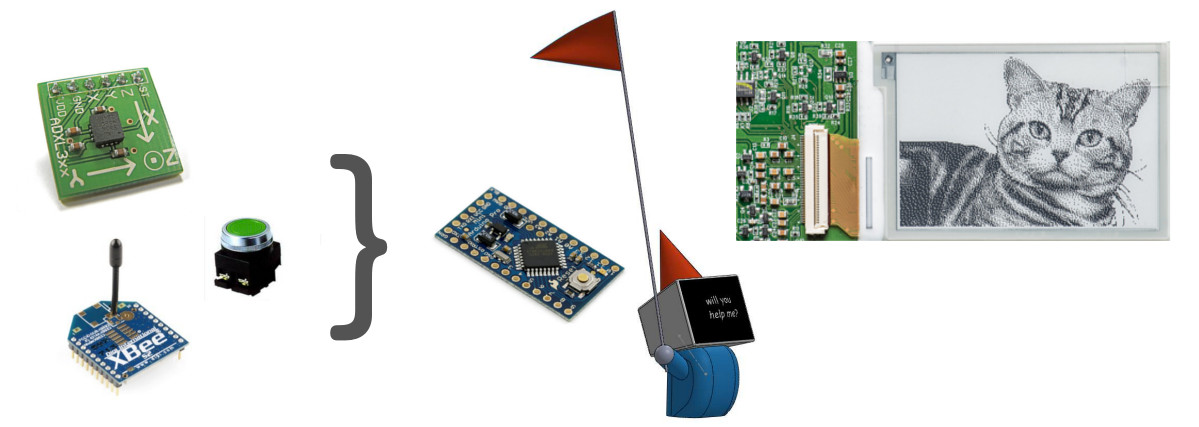
Here is a rough sketch for the internals. I would like the external display to be able to show a message even if the battery dies so e-ink displays or a mechanical display would make sense. As for the inputs, there are two basic ones: an accelerometer to detect when people are picking it up or putting it down and a button for interaction. It might also be worthwhile to throw in a radio controller for wizard of oz operation. The inputs from these would be munged through a AVR microcontroller and fed to the display in the gnome's head.