Microgravity Exercise Device
00. Final Project Design
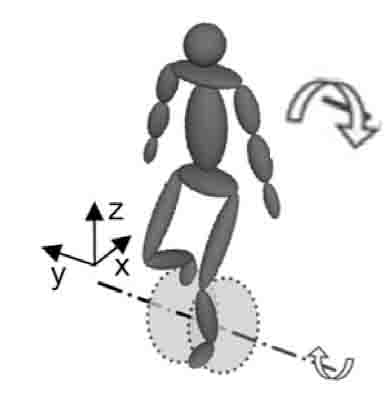
Astronauts lose bone and muscle mass in microgravity due to the lack of loading. This deconditioning can lead to critical injuries such as fractures and can endanger missions, especially the lower body, which subject to an important deconditioning. An efficient countermeasure is to exercise. The current exercise devices on board of the space station take a significant volume and have to be isolated from the rest of the station because of large vibrations. This project aims at replacing these cumbersome devices causing vibrations, by a convenient wearable device, using the angular momentum. In microgravity, when the subject "pedals" in the air (thus exercising), he will induce a rotation in the opposite direction of rotation than its pedaling rotation. It is critical to stabilize the subject while he is doing his exercise. A stabilizing device, using a counter angular momentum is needed to perform this exercise freely floating in microgravity.
The idea is to add a device with rotating wheels that would be able to stabilize the subject cycling. The first paper design is suggested here. I first, though about two options: A. with two bars on each side of the subject rotating, or B. with high moment of inertia wheels decentered from the subject center of mass for a higher angular momentum effect.
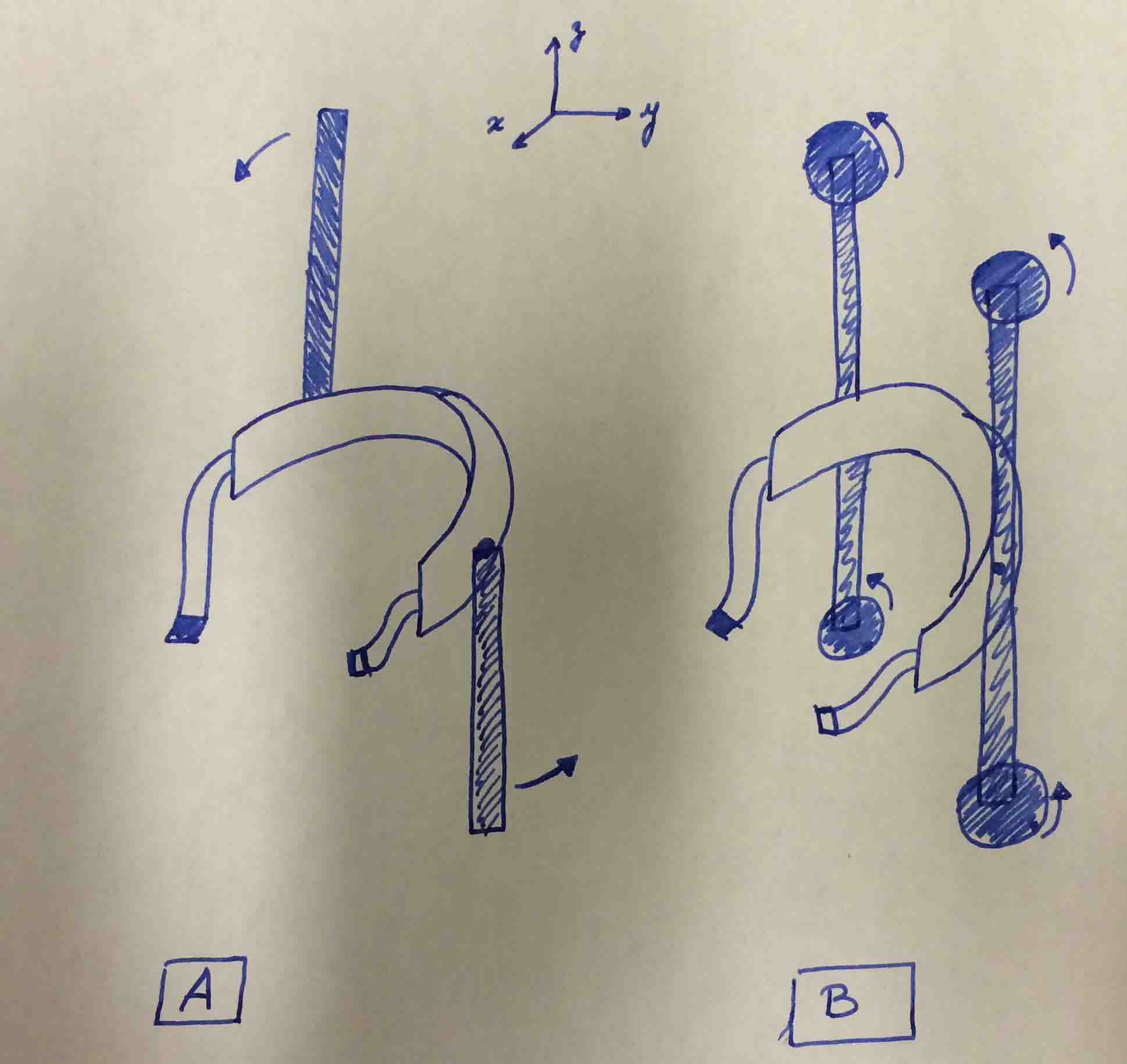
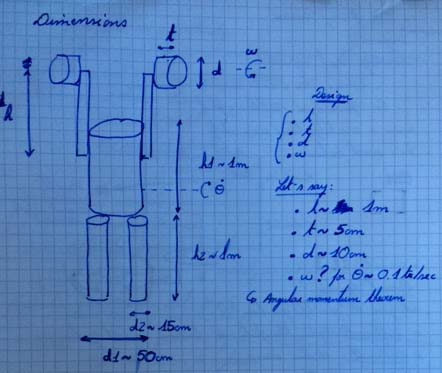
Solution B seemed less dangerous and will allow the subject to have use of its arms in case he needs them, I thus chose option B, whith only two wheels, for simplicity. I, then needed to have basic dimension of the system to know what type of motors and material I will need for the realisation of the project. I had to compute the moment of inertia of the body, so I modelled it by 3 different cylinders (1 for the trunk + 2 arms and 2 for the legs). Using the formula of the moment of inertia of a cylinder I could compute the whole moment of inertia of the body and thus try to understand what parameters would be needed for my system. I assumed that I wanted a rotation of the body (induced by the legs) of 1 rotation per 10 sec, so 1rpsec, 6 rpm or 0.6 rad/sec. With raw calculus I could then compute what would be needed for the rotation rate of the wheels (to check if the system was feasible). After calculus, we concluded that
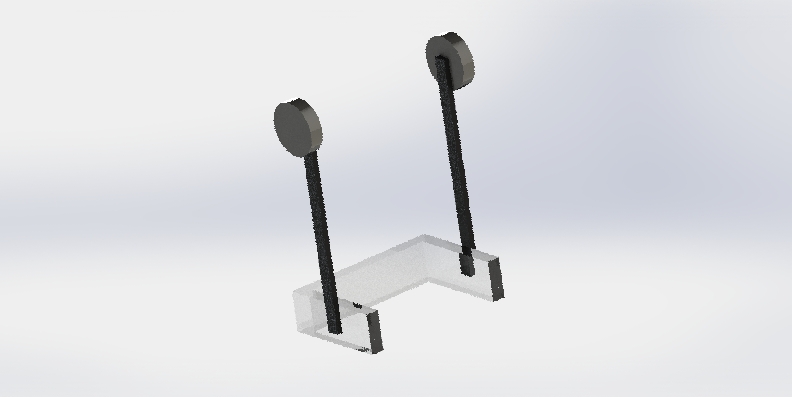
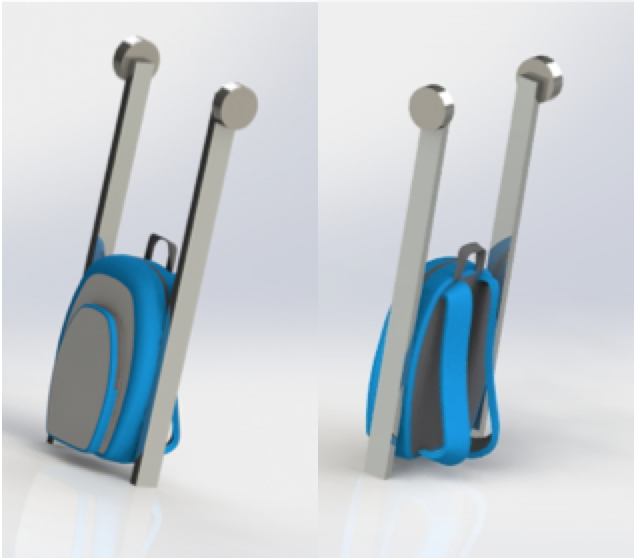
The next step was then to model the system on Solidworks. A very simple version (it has been a while since I used SolidWorks...) is the following one.
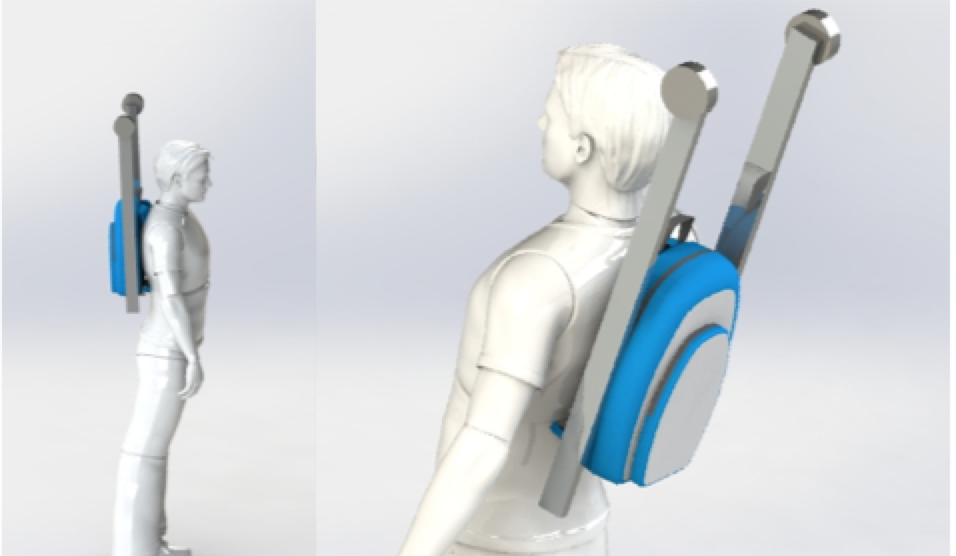
I then, tried to use already existing models to implement my system. I figured out that instead of a belt, a bagckpack would actually be more safe and more comfortable, while I would be able to embedded the electronic system in it. I downloaded a pre-existing mockup of the backpack and try to deisgn my system on it. I, also try to download a Solidworks model of a human subject to have an idea on how to implement the backpack with the subject. I encountered issues about the interface and I need to work more with Solidworks to (re)gain "fluency".
I think that I am going to rotate the wheel with a combination of continuous current motor + pulley and belt, where the motor will be attache to the lower extremelty of the backpack and the belt will link the motor to the pulley (that will be linke the wheels). I wanted to implement this solution in Solidworks but it is a next step.
The last step, for this first preliminary design, would be to make a short animation video, animating a subject pedaling in microgravity with and without my system to show the stabilization process. I started by creating a human subject with MakeHuman, an open source tool to create and animate humans. I created it but did not enough time to export my CAD model into Maya, and then animate the whole scene. Coming soon !