 Concept
I decided to work on the shape changing table concept for the final two weeks. I was envisioning a table that morphs (grows larger or shrinks) as per the number of people around it and changes as per the task context (e.g. changing from flat to whiteboard during brainstorming).
Concept
I decided to work on the shape changing table concept for the final two weeks. I was envisioning a table that morphs (grows larger or shrinks) as per the number of people around it and changes as per the task context (e.g. changing from flat to whiteboard during brainstorming).
I had seen a few tables that could switch configurations such as the popular schwartz table but these were limiting in that they could only switch from one config to the other and didn't carry any intelligence.
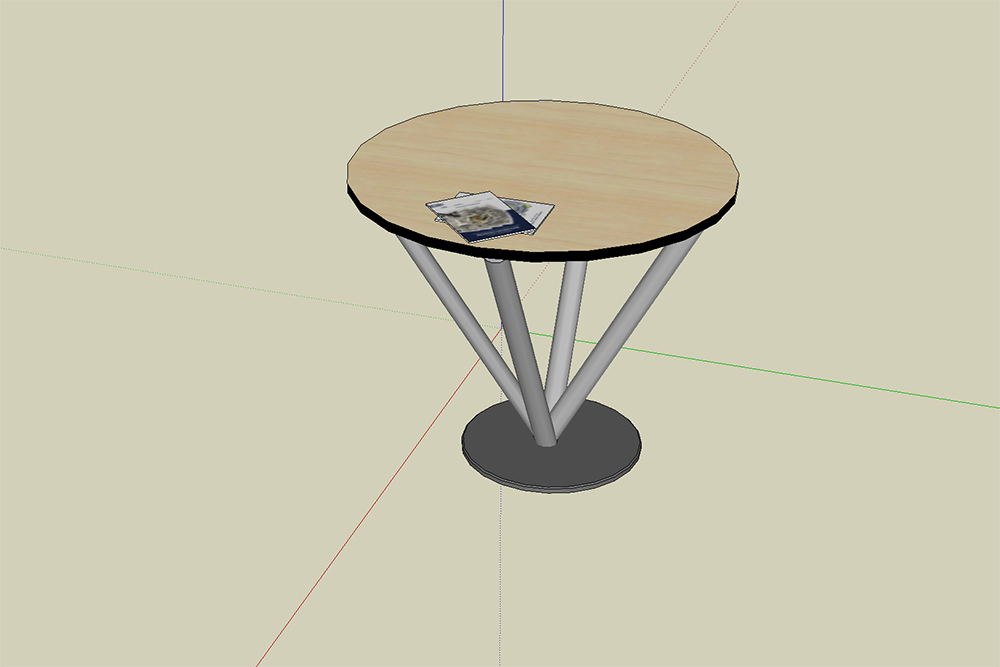
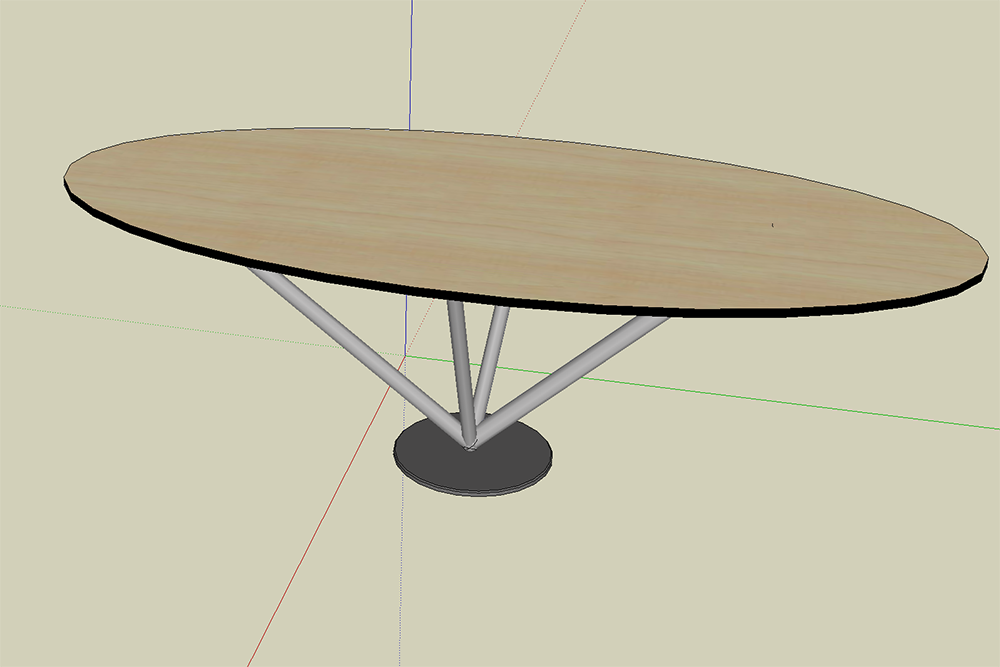
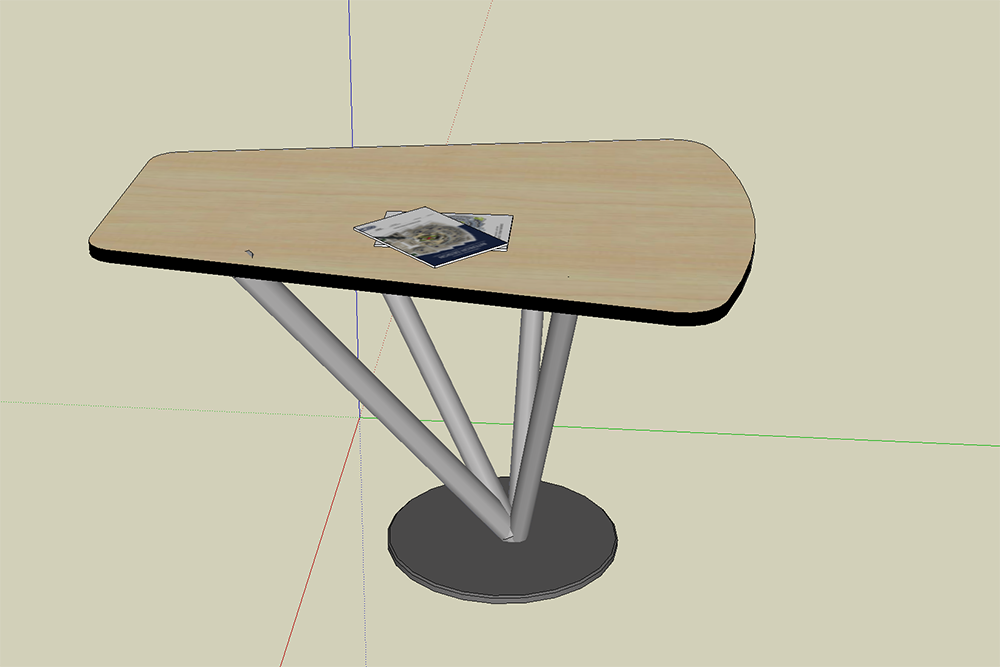
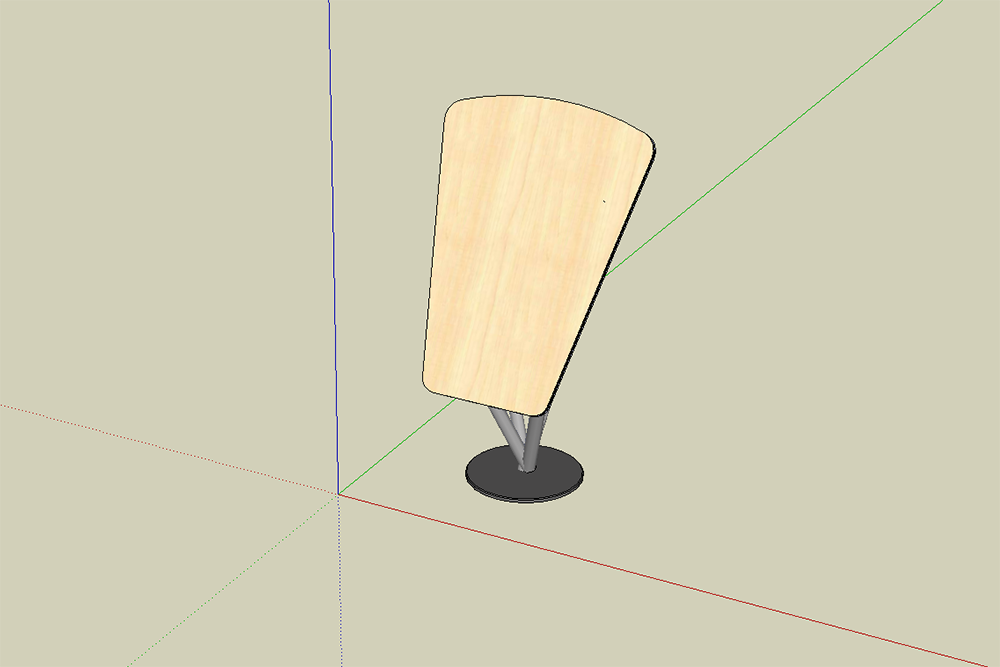
Computer Modelling
I decided to model some of these concepts I was envisioning, also to freeze on the dimensions of the current prototype.
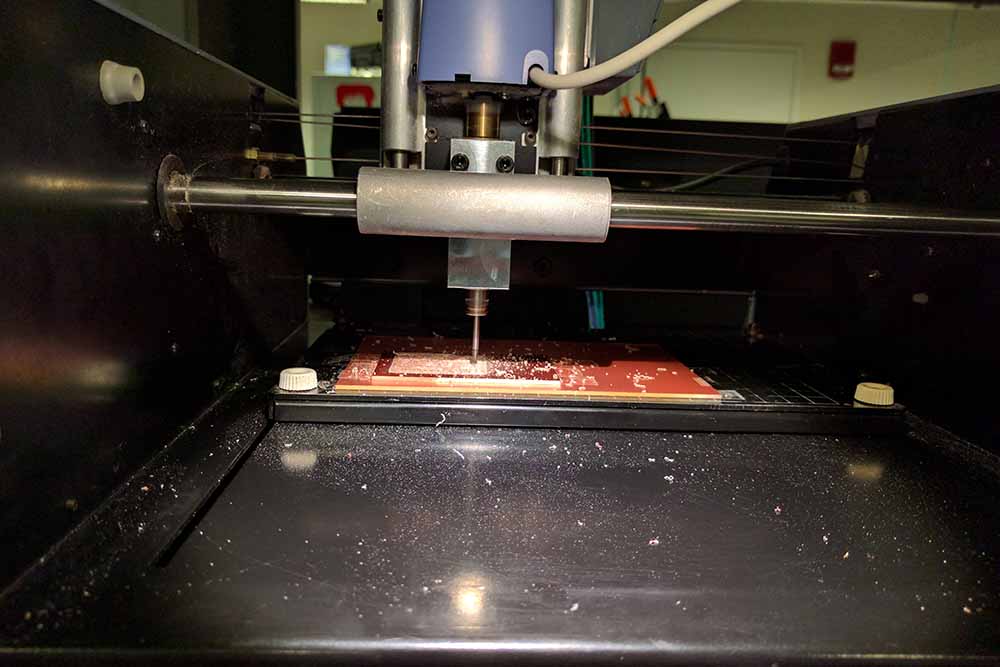
Computer Controllled Cutting:
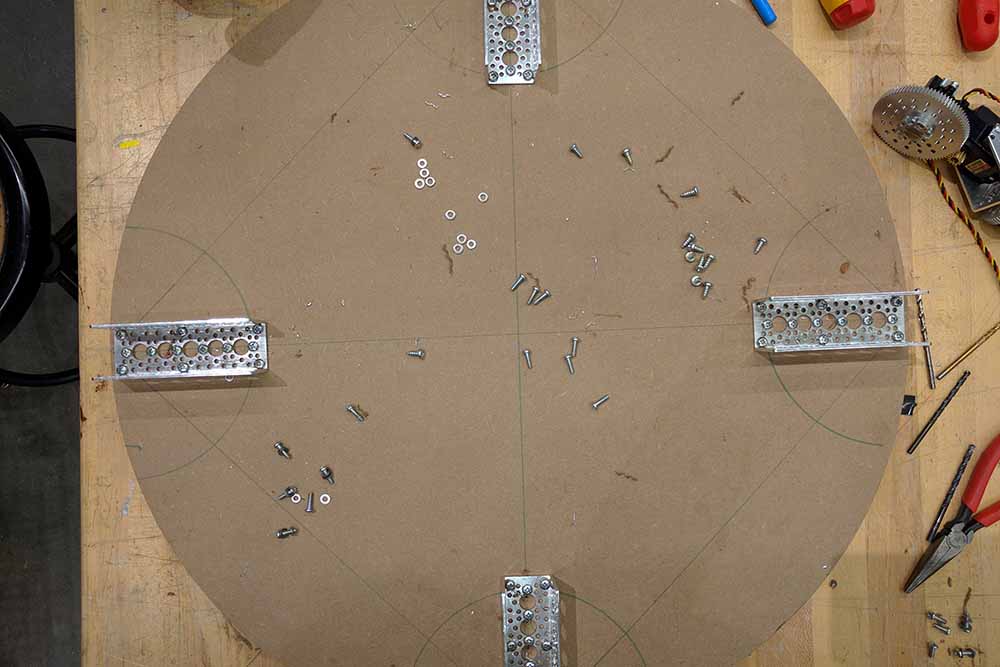
I decided to use a heavy MDF as the base to be able to mount all the mechanical assemblies also to ensure that the table doesn't topple over when weight shifts due to arm movements. I used the ShopBot to cut out from the MDF board with a 1/4" ball endmill.




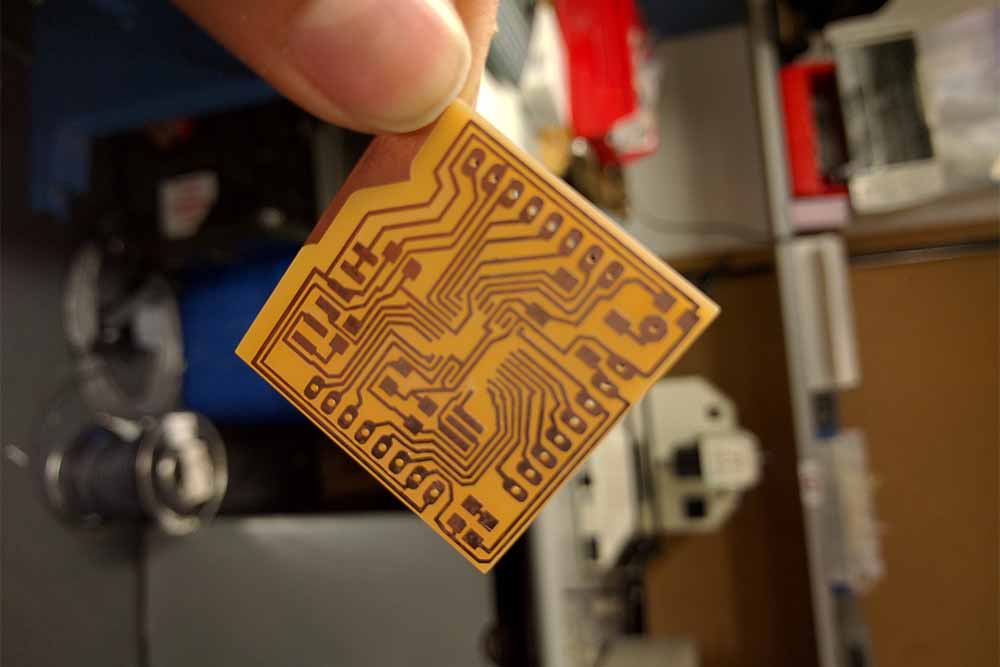
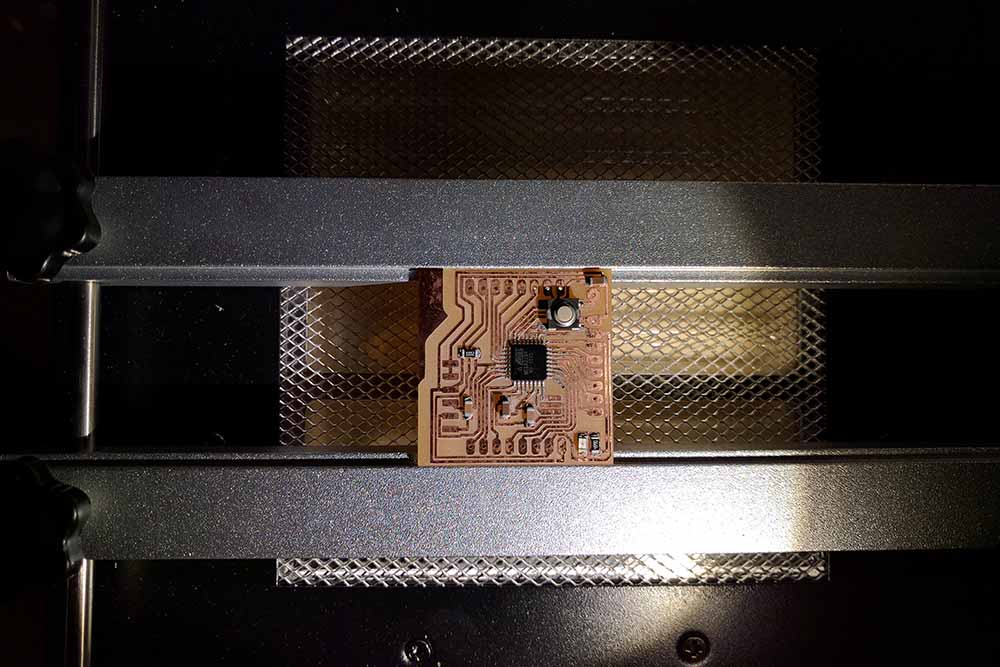
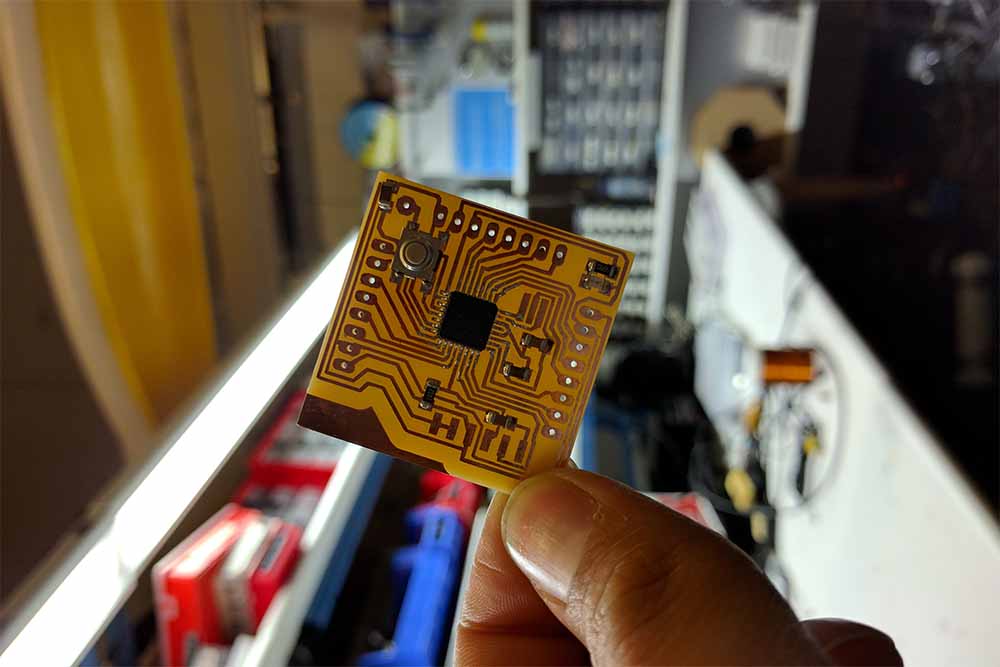
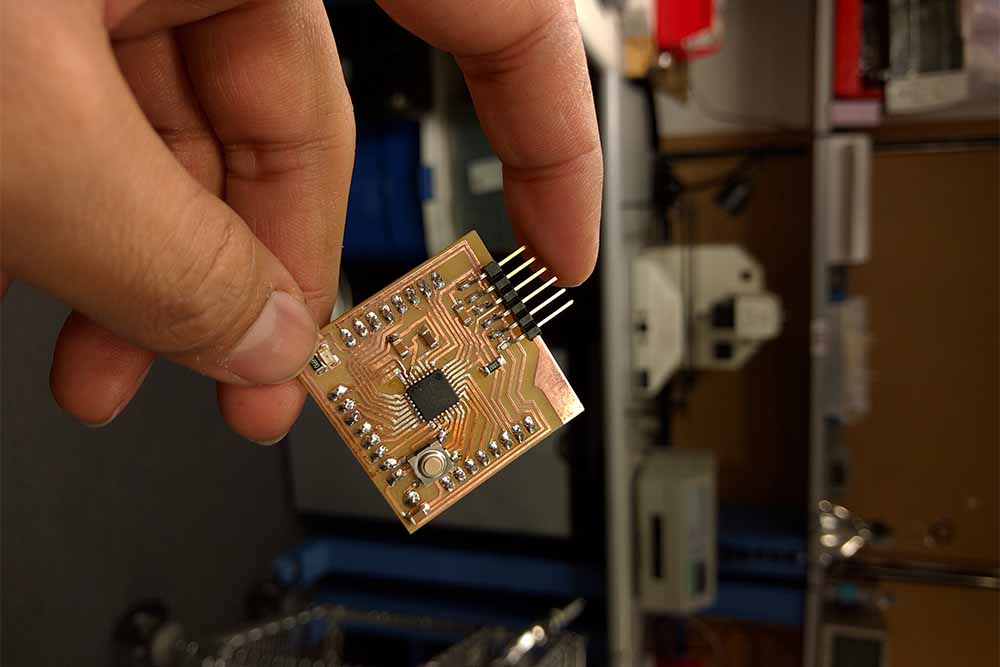
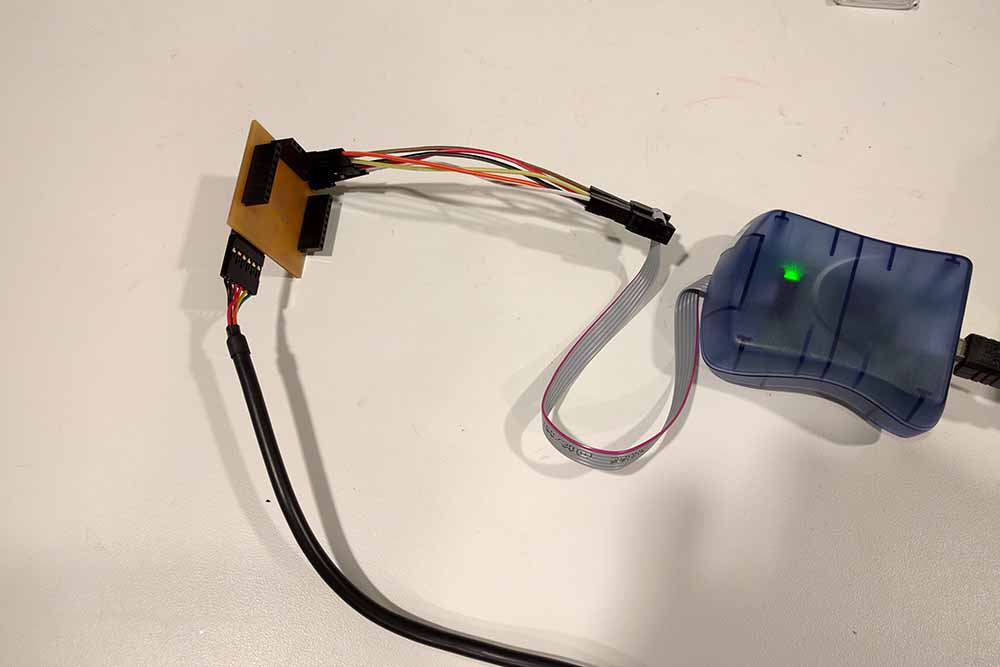
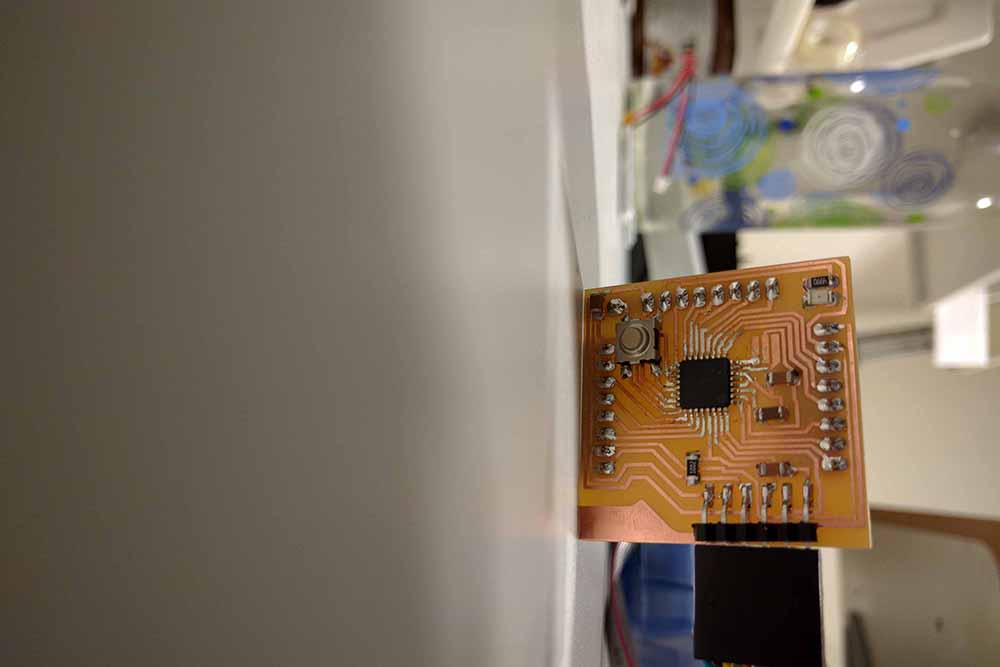
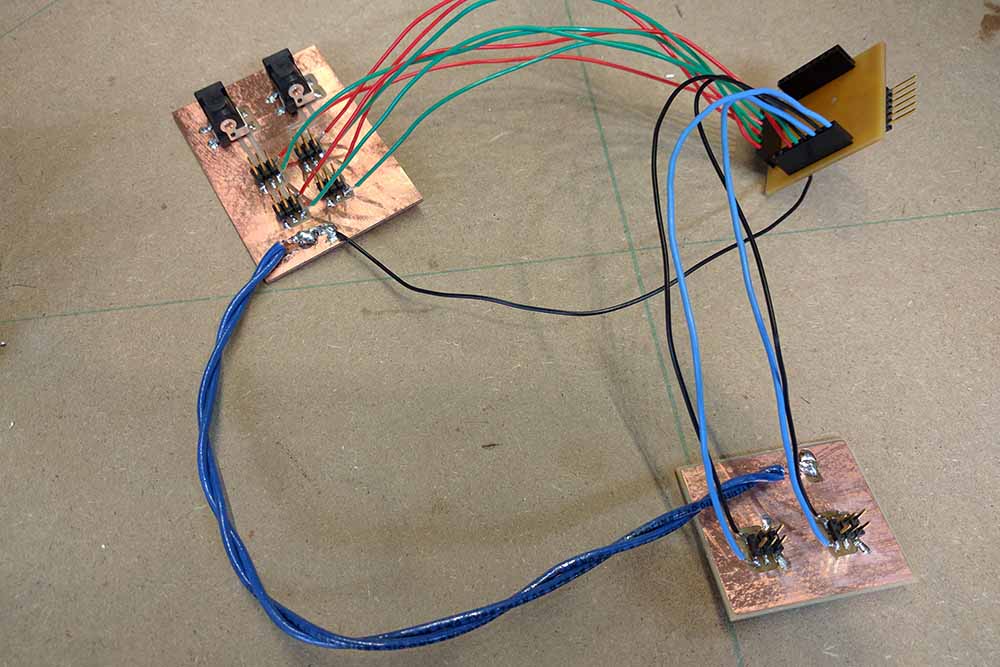
Electronics Production, Embedded Programming
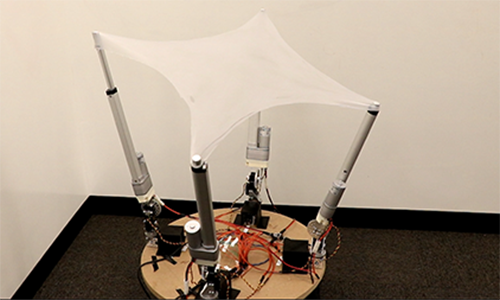
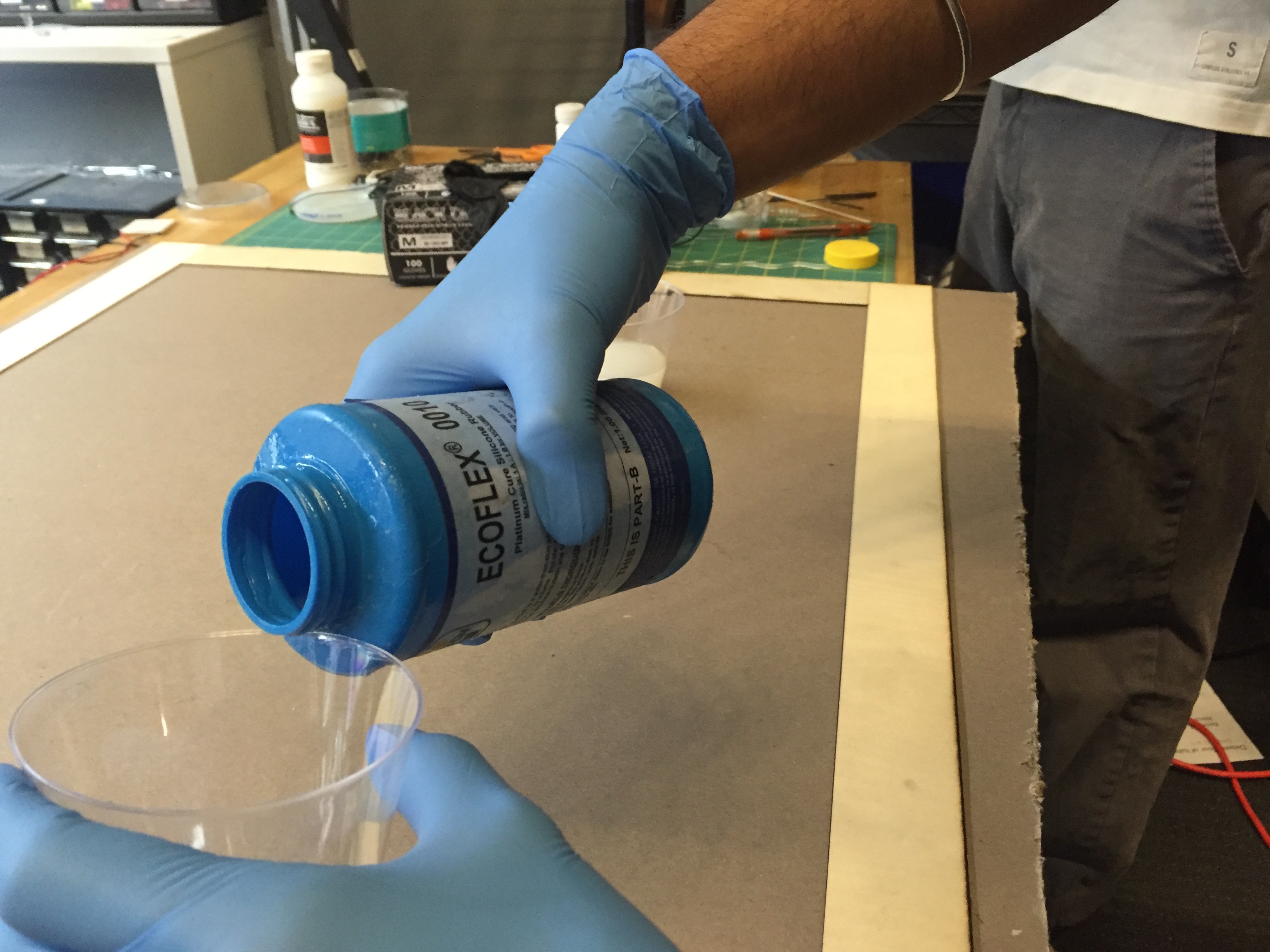
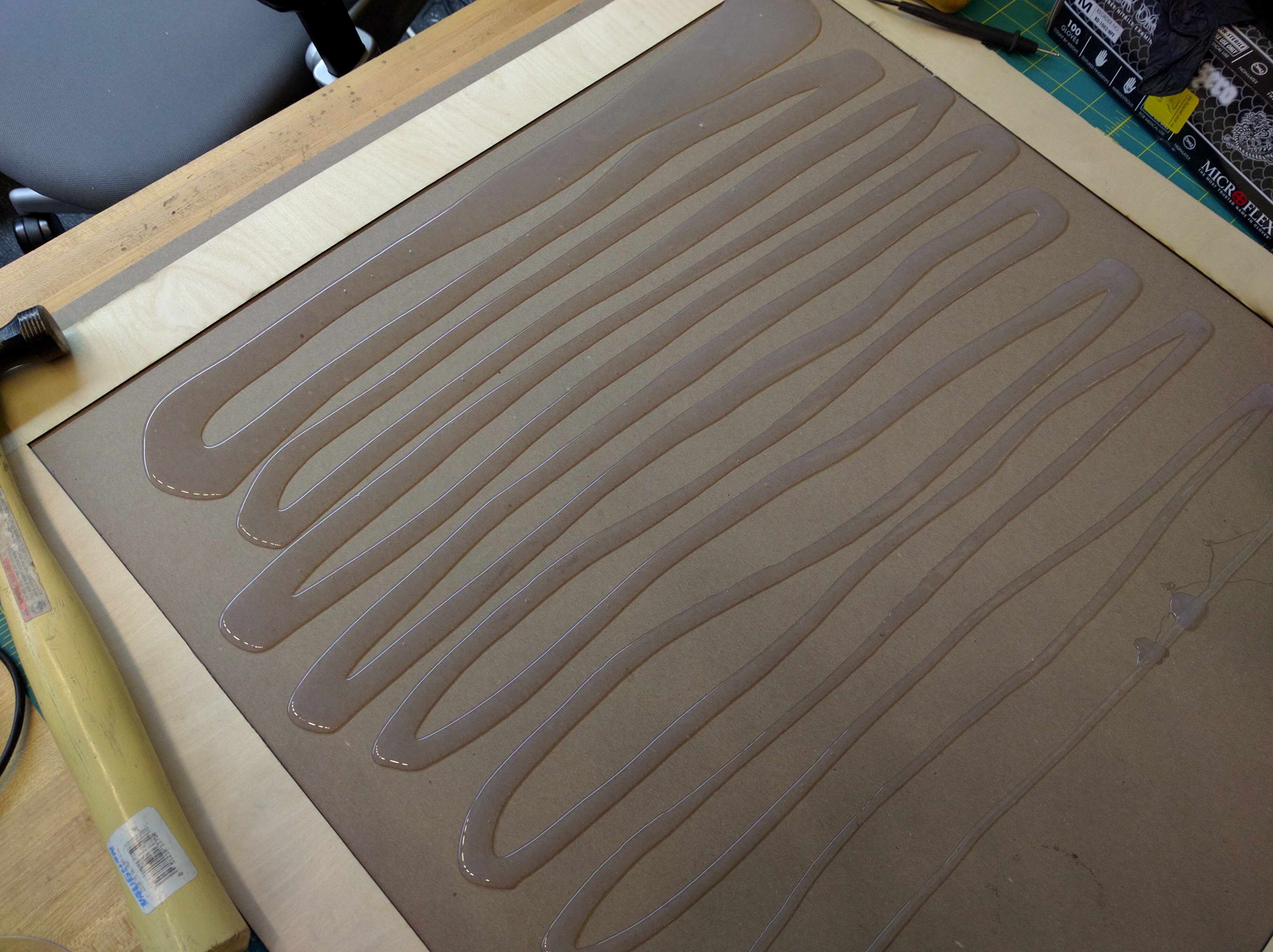
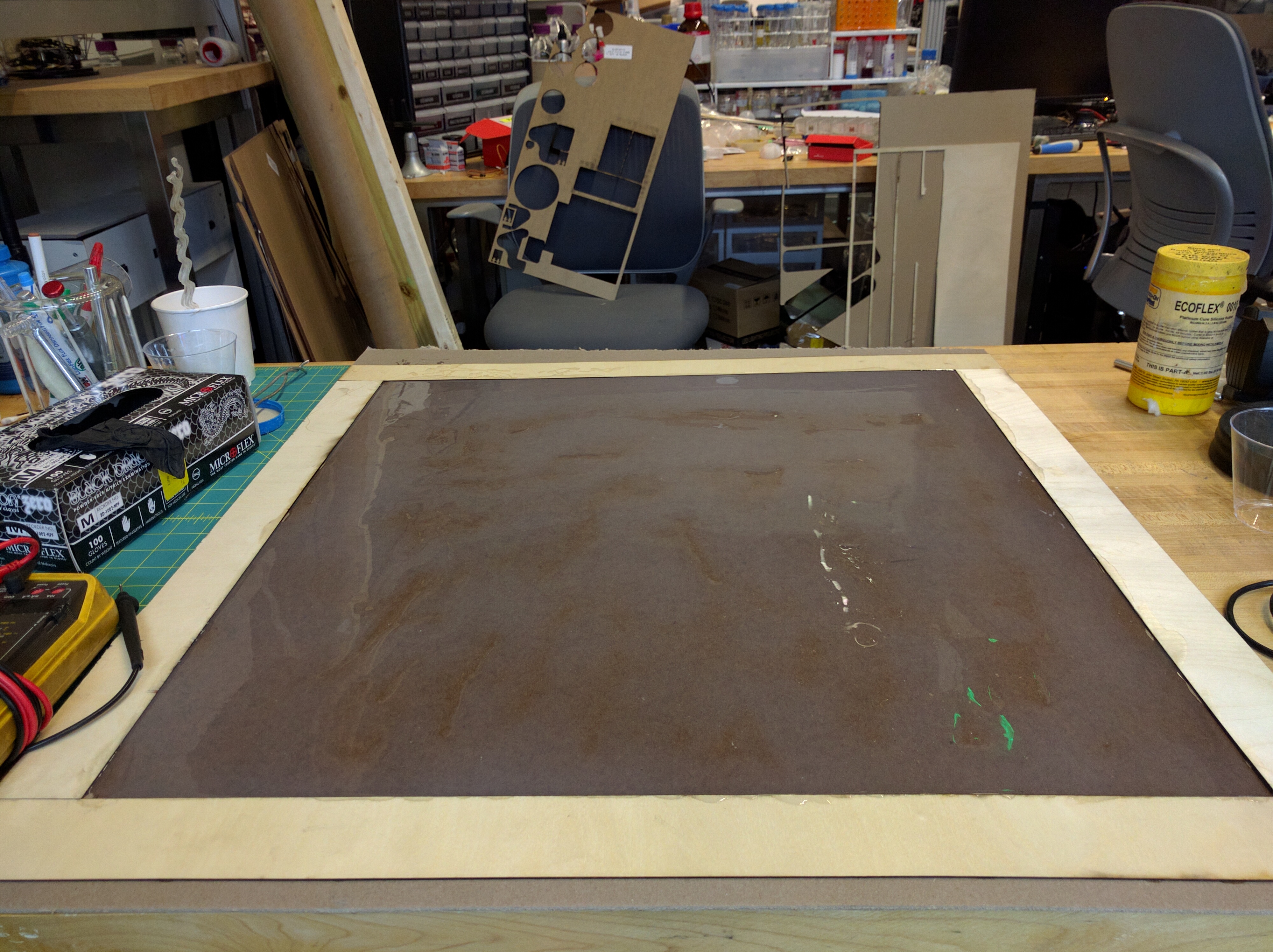
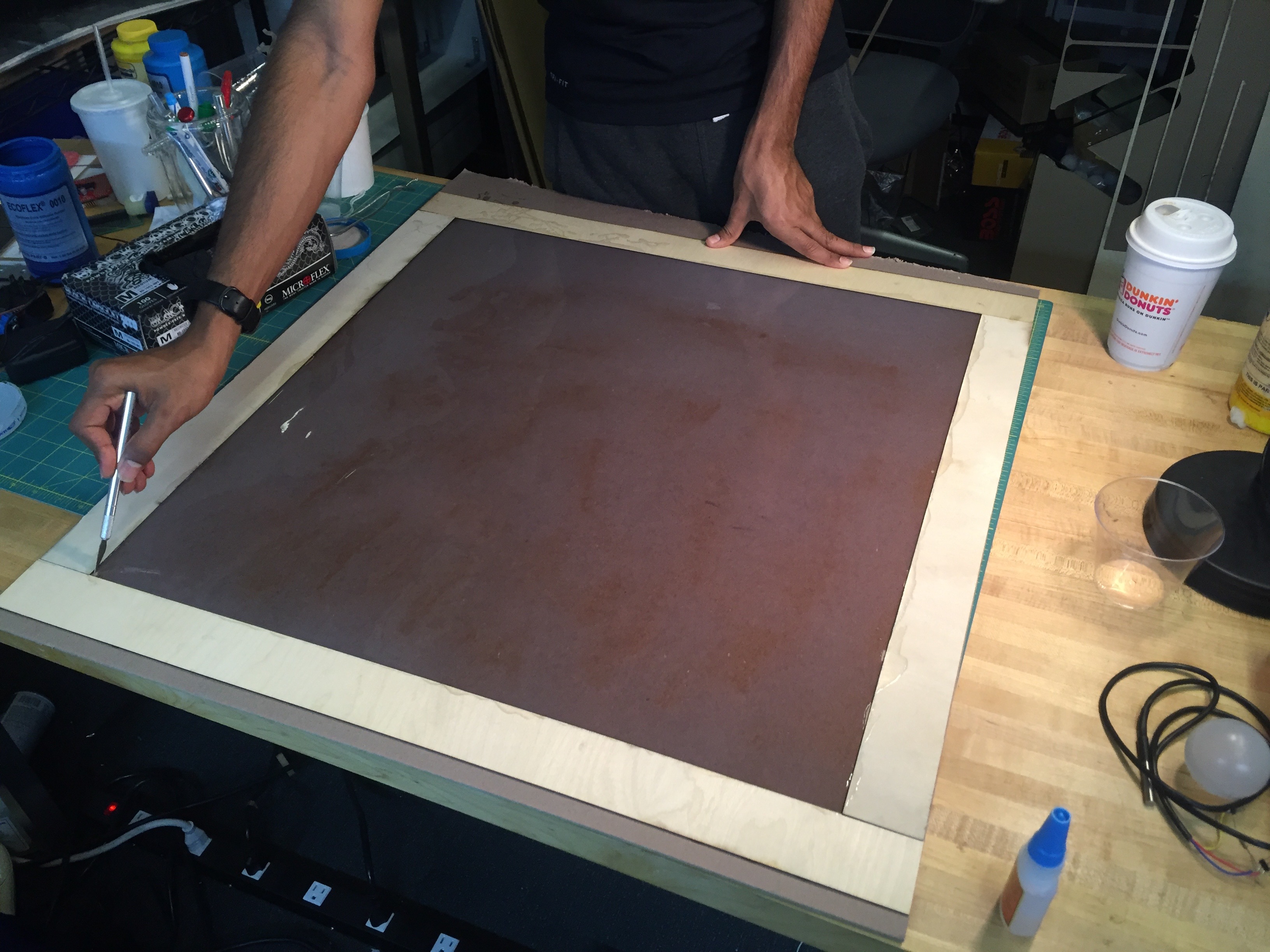
Molding Elastic Surface


Mechanical Design, Machine Building, Output Devices
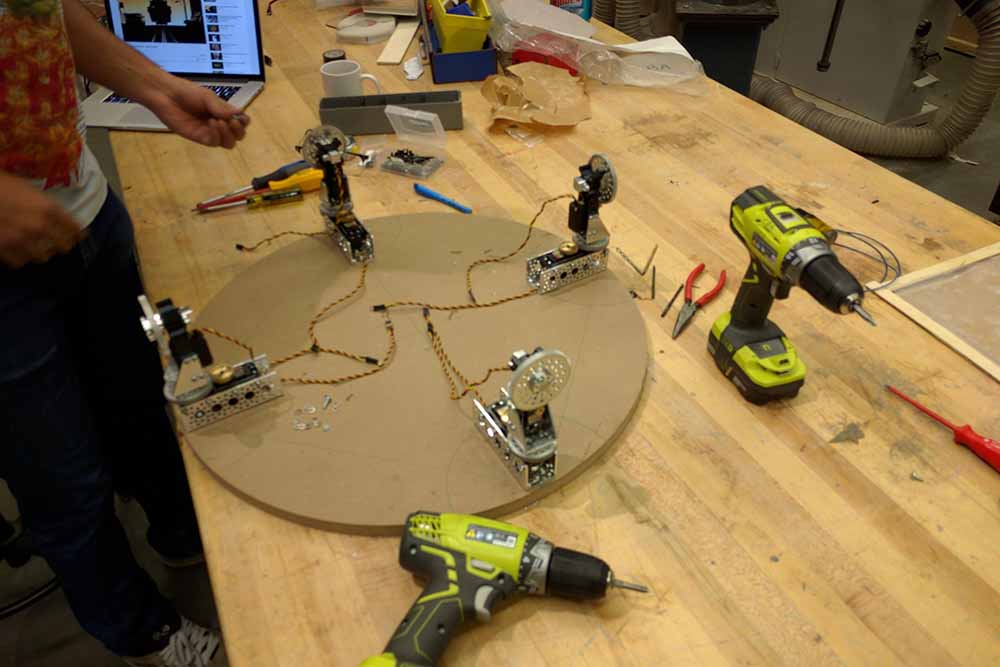
I went through a number of sketches to design how the leg assemblies are going to look like and finally settled on a concept of having 2 rotary degrees of freedom and a linear degree of freedom for each leg. This was to be accomplished using motors with positional feedback, so I took high torque servos (max. torque: 179 oz/inch): one for yaw control of leg, another for pitch and yet another linear servo to move up/down.
About servos:The linear servos were meant to carry heavy platform/surface that would have to stretched, and consequently were decided to be heavy duty 25lbs linear servos. Unlike linear actuators, these linear servos run on completely different signals and can be controlled through PWM signals.
Gears
The yaw control servo doesn't really need super high torque, so to give it a bit more speed, I decided to use 4:1 gear




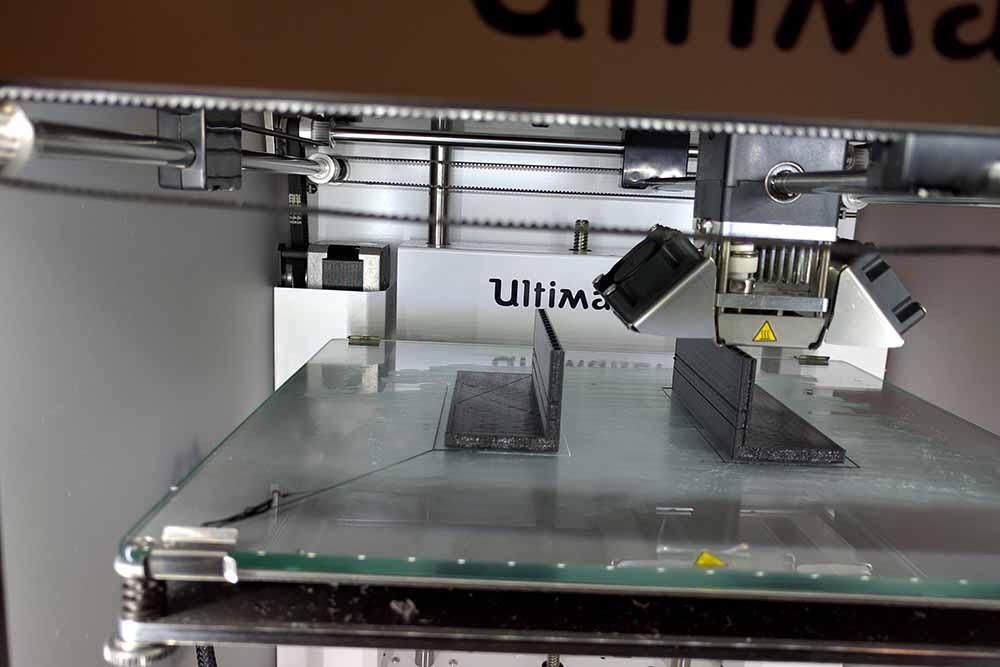
3D printing