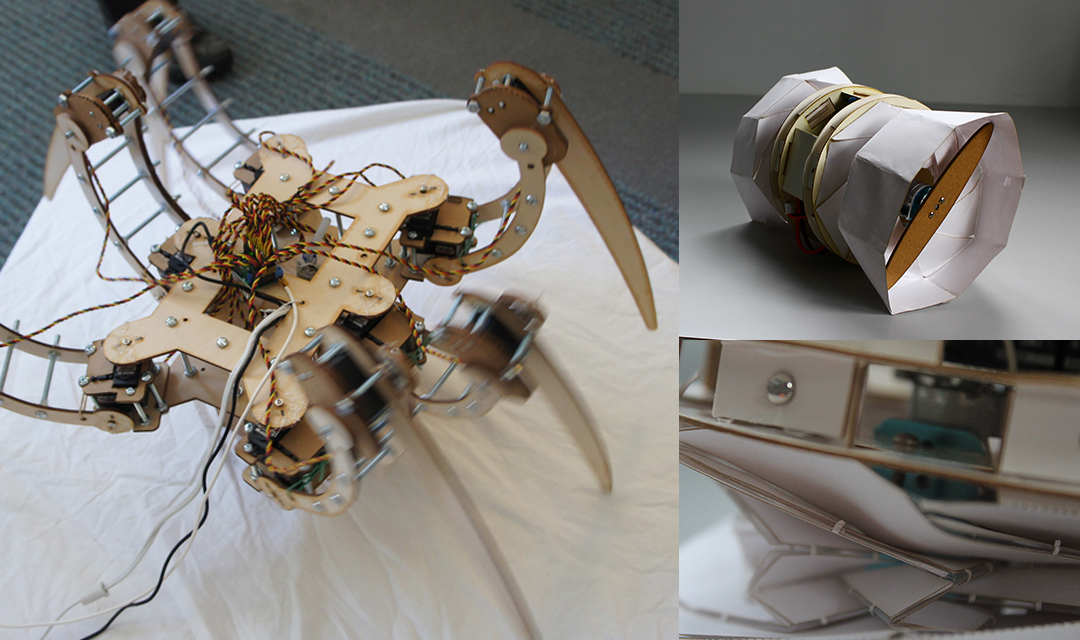
I made the one on the left about 4 years ago, when I knew even less than I do now about making things. I made the one on the right last year in Chuck Hoberman's Informal Robotics class. I didn't want to make anything with legs (complex) or wheels (not as cool), so I tried to make it move like an amoeba (by deforming itself to walk). Although the Amoebot could theoretically only use one motor, it currently uses 2 for balance.

A team from Harvard's Wyss Institute, Harvard's SEAS, and MIT built an autonomous robot that starts out as a single composite sheet programmed to fold itself into a complex shape and crawl away without any human intervention. Despite the robot’s impressive capabilities, the technique doesn’t require space-age materials. The plastic is the same material countless pre-schoolers use to make Shrinky Dinks.
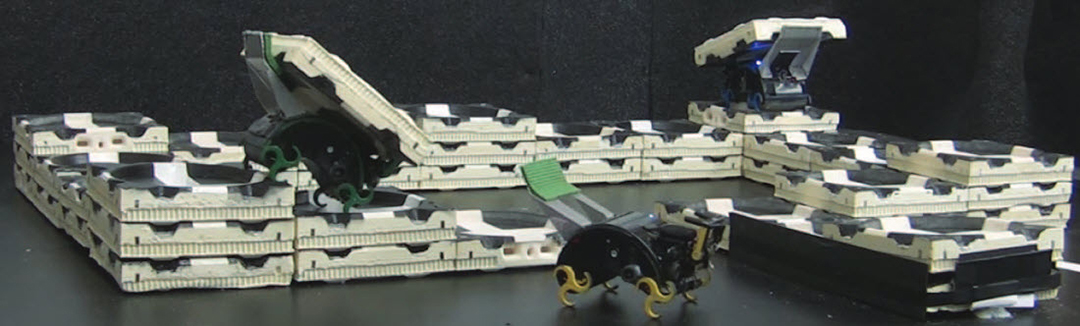
"The goal of the TERMES project is to develop a swarm construction system in which robots cooperate to build 3D structures much larger than themselves. The current hardware system consists of simple but autonomous mobile robots and specialized passive blocks; the robot is able to manipulate blocks to build tall structures, as well as manuever over and around the structures it creates." Also from Harvard... Far out!!!
"The pursuit of the Aerial Construction project is multidisciplinary, requiring the development of nonstandard material systems, advanced digital design and construction processes, and adaptive strategies for controlling the aerial robots as they interact with their environment and cooperate in the assembly task."