How to Make (Almost) Anything
This week I took the opportunity to work on my final project. This is the first weekly assignment that is for my final. Since I will be making a skateboard I wanted to have a way of tracking distance travelled. I decided to do it with magnetic fields
Magnetic fields
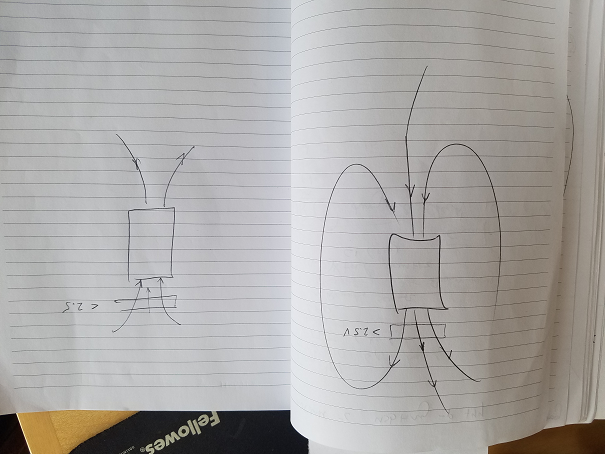
Rob first took the time to show me the physics of magnetic fields. This image shows that it flows all in one direction and loops around. That makes it that the magnet sensor will read it greater and lesser than 2.5.
...
Shop Bot
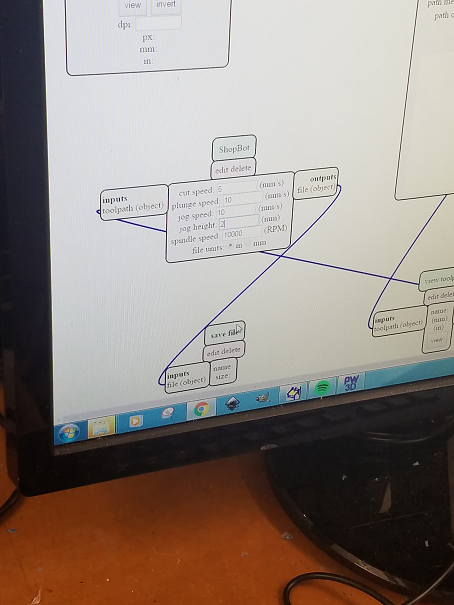
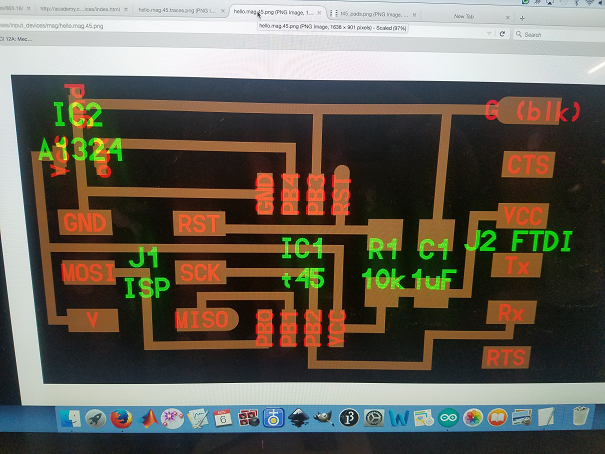
I milled by board on the shopbot and used the modules. Since they were not set yet I had to put them in and this took some time to figure out.
No ISP
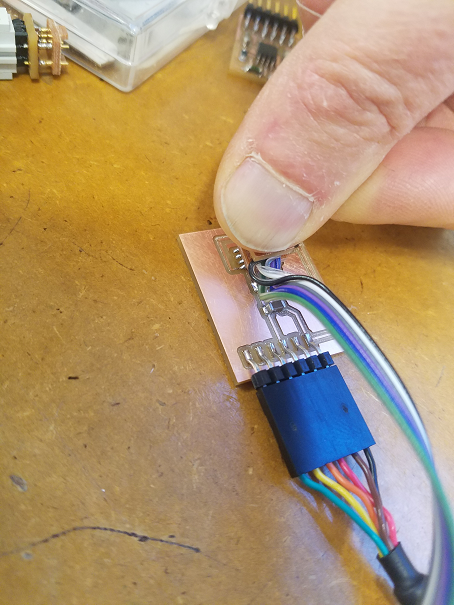
I made my board without the ISP so it was a lot simpler. Instead I took the opportunity to use Rob's cable that would send the code through the tiny 45.
Did not work
After running avr dude it showed that it did not work and even before that I got kicked out because I think I put the cable on backwards and overheated. When I flipped the cable it worked on the second try.
Avr Dude
After my first try it said that it was a success. However when I tested my code it did not show it working. I realized this was because I was missing a trace connection. So I fixed that. It did not work again and tehn I realized I needed more soder. I fixed that. Then I realized one of my traces had a gap. I fixed that.
Success  After all my fixed my code was working. Now I have to figure out what all these numbers mean. I also saw that when I put my little magnet up to the sensor there was changes. Also I have to figure out what that means. In the meantime, Rob recommended an AVR book and I'm starting to read to decode it.
After all my fixed my code was working. Now I have to figure out what all these numbers mean. I also saw that when I put my little magnet up to the sensor there was changes. Also I have to figure out what that means. In the meantime, Rob recommended an AVR book and I'm starting to read to decode it.