Final Update
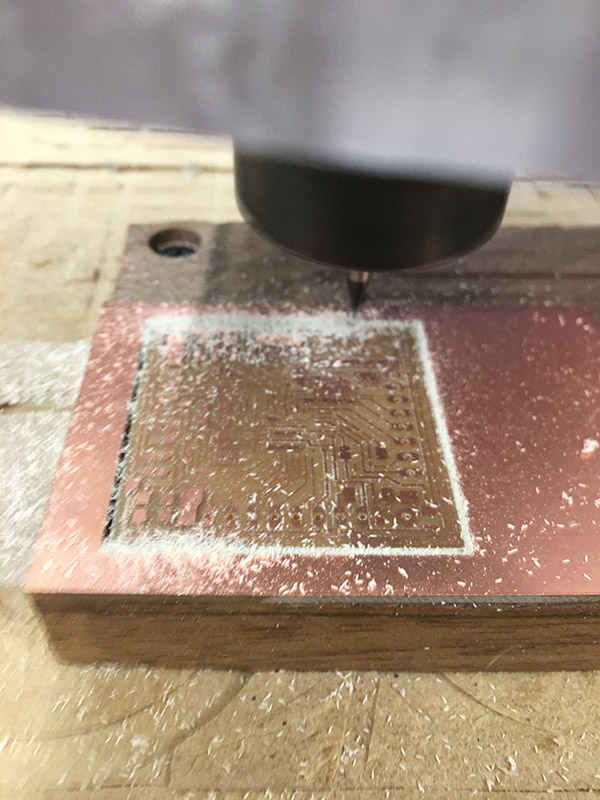
In updating the final - starting with 3D printing the components and creating the frame for which this parametric kinetic surface will rest in. Using both PLA printers and SLA printers, the SLA again worked better for the precision of the parts I needed to make. Also creating a fabduino chip to begin to customize the shape of the boards for the final cage operation.

Also creating a fabduino board so that the design can be more compact.
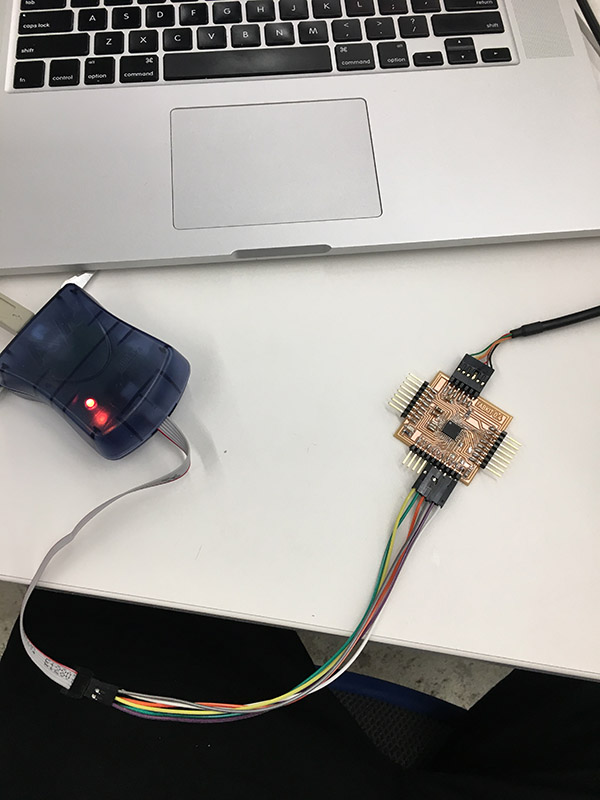

Finally got it working, going onto creating the cage, attempting to weld steel rods together proved to take too much time and very inaccurate.

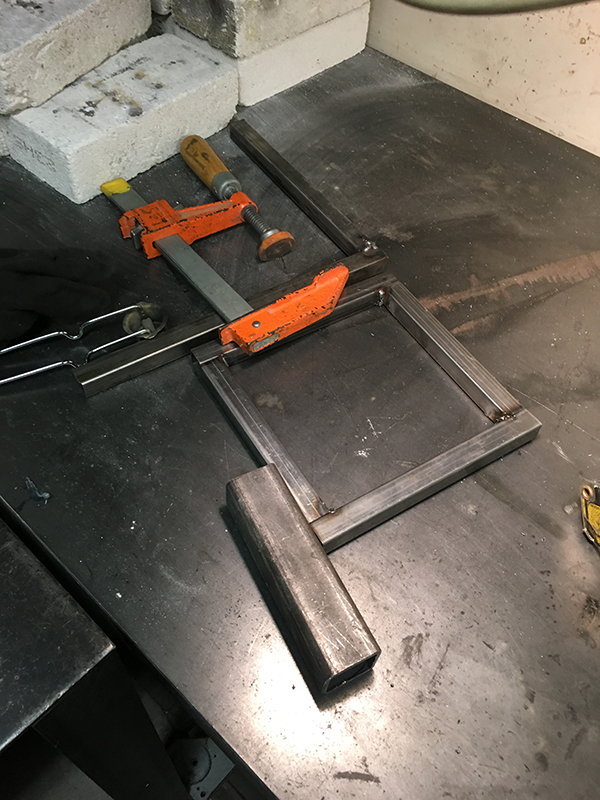

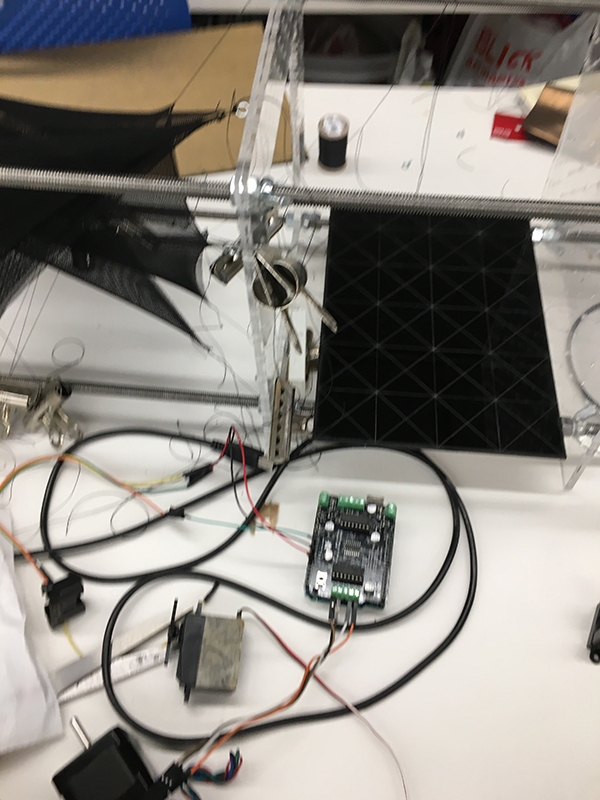
In spirit of spiral development - realizing that welding would take more time and it is less precise, that process was abandoned. Also laser cutting some cages just to begin to test out the stepper motor strength, torque and speed and its subsequent effects on fabrics of different tensile qualities.
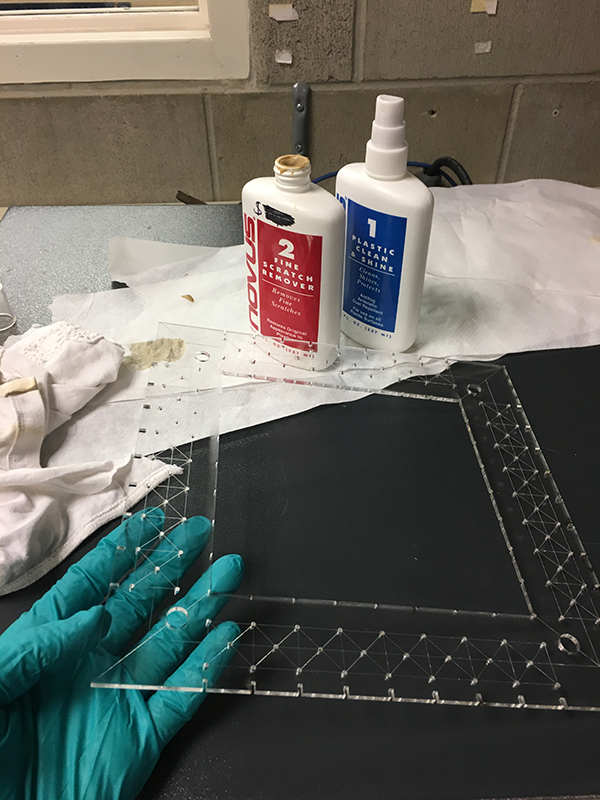
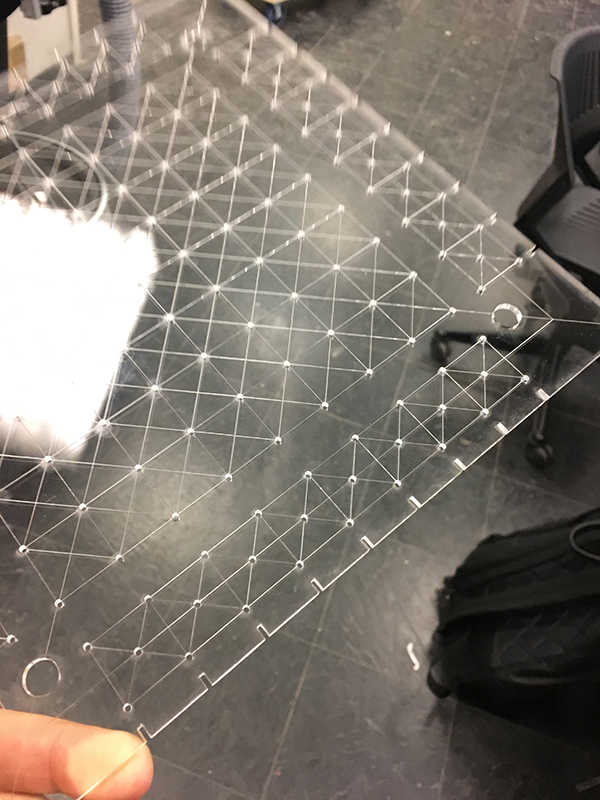

Many tests were done on the cutter to achieve optimal precision for the snug fit needed for putting the threaded rods through.


Leveling the frame once its done was easy to level as you can release and pull hex nuts through the threaded rods to level.
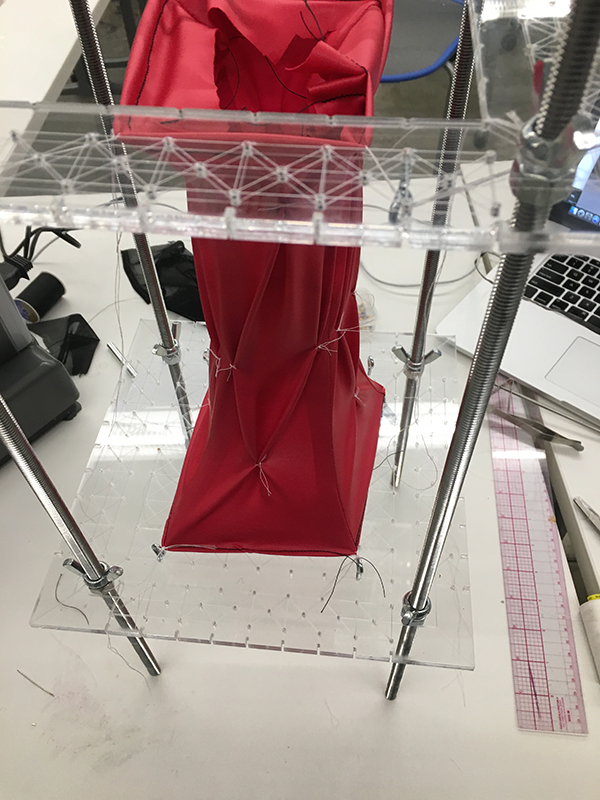
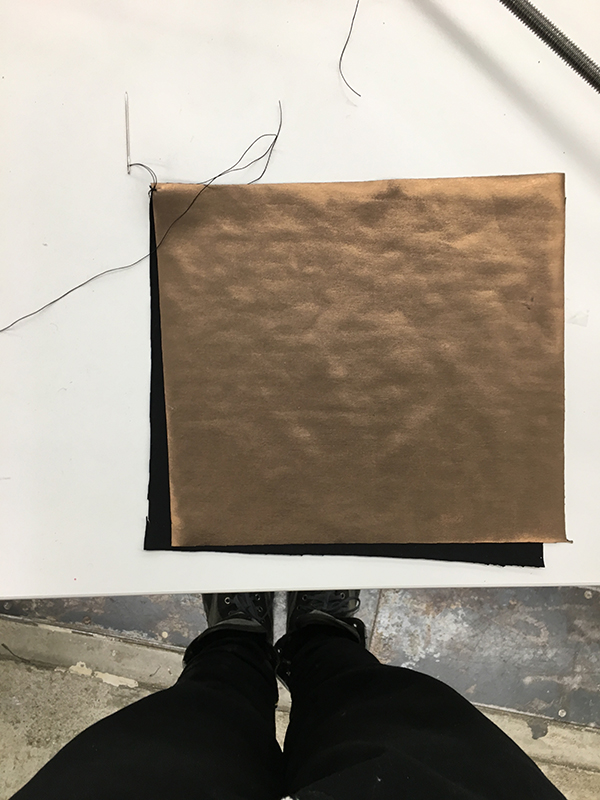
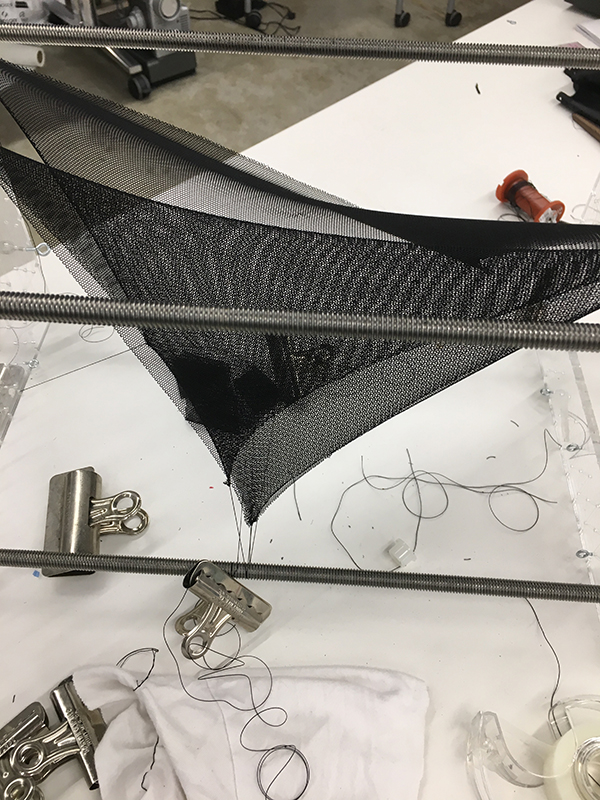
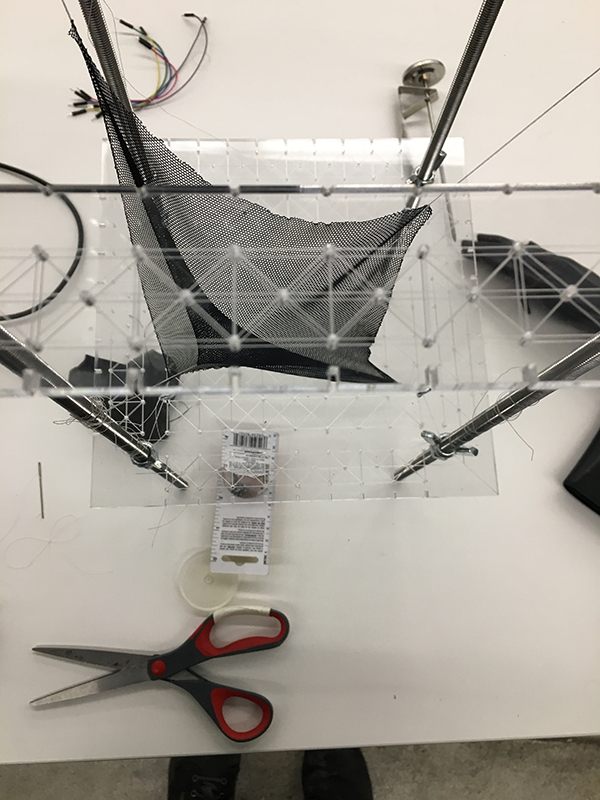
In doing some initial sleeve tests - there were to many parameters from the type of cloth, shape, stitching pattern and where it latches onto in the cage. So similar to grasshopper as a parametric design tool - making a form finding parametric machine, where you can control all the parameters physically as well as through sensor data.
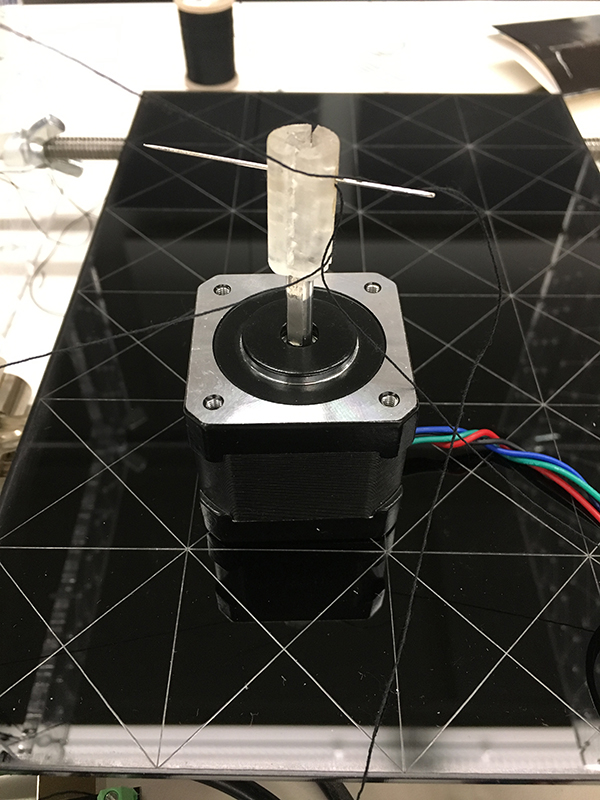
The 3D printed notches made it easy to both attach to the stepper but also lace the thread through.
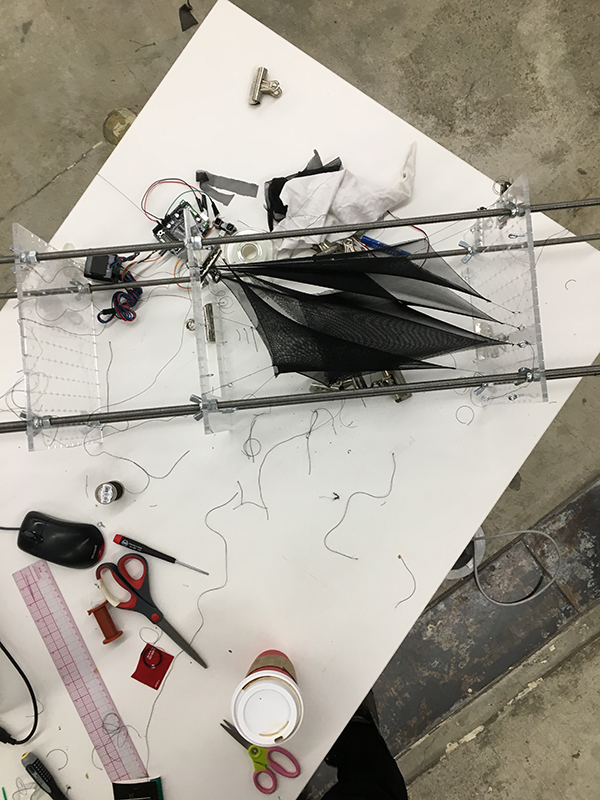
Getting multiple patterns going and the calibration of which string to pull at what force was the hardest part. The torque on the motors were not strong enough sometimes to pull on the thread, so they would get out of step as they are pulled back and when they repeat, it would always land in a different landing spot.
Getting the wireless interface to work from the ipad to the servo motor for parametric control of form - once you like the form you see you can cast it or solidify it.
The proximity sensors also worked for a more random form generator. Once your hand triggers the SHARP Infrared sensor, made mainly for TV remotes, it pushes and pulls on all motors gently to get unpredictable forms.