Outputs
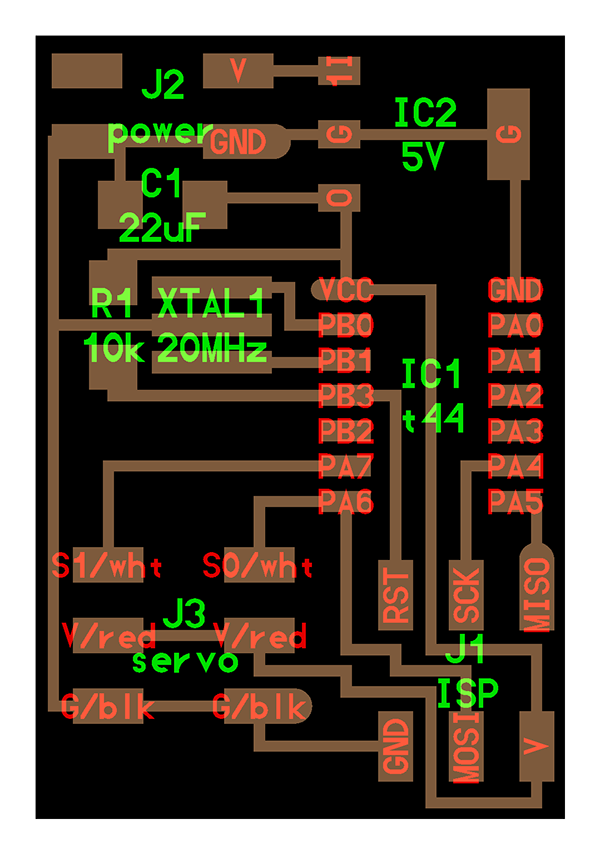
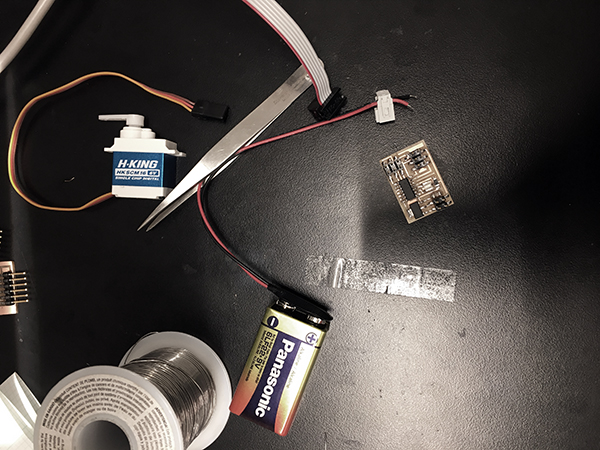
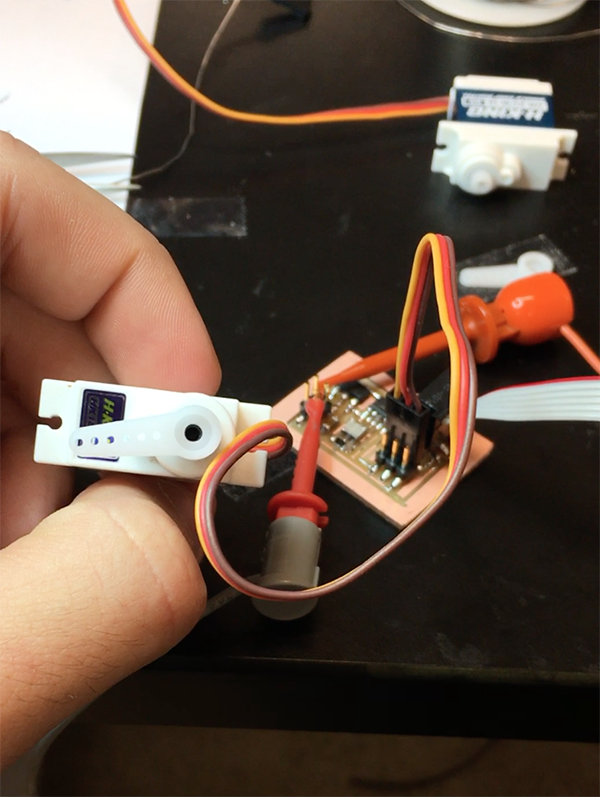
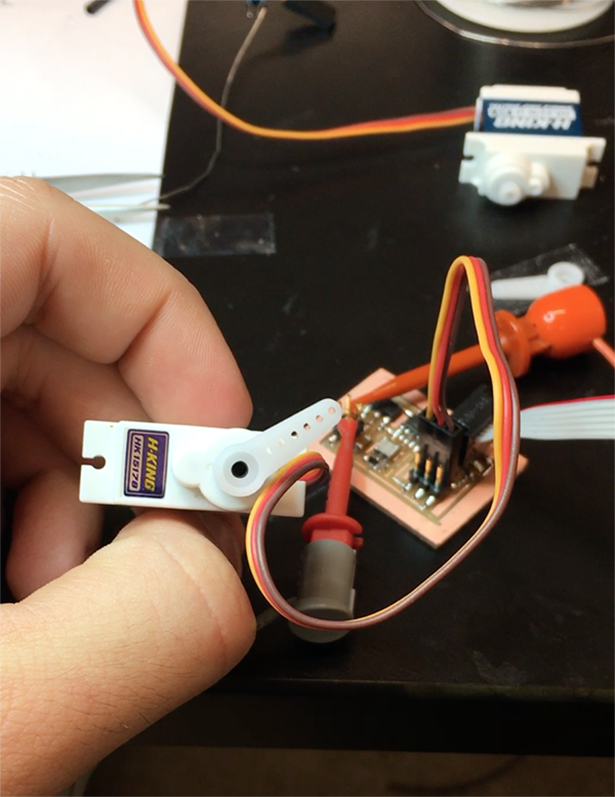
In looking at the final project being a tectonice fabric component that responds to your body - servo motors seemed most appropriate as they give a precise degree count whilst being light. This was the primary reason why I did not use a stepper motor, because in a stepper motor it doest not remember its position only remembers its state and goes by steps. Hence, looking at the hello servo board.
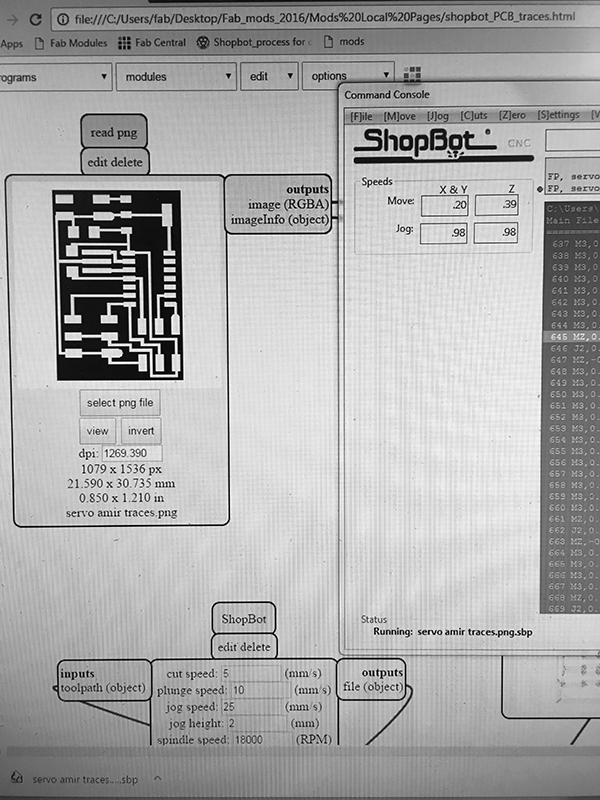

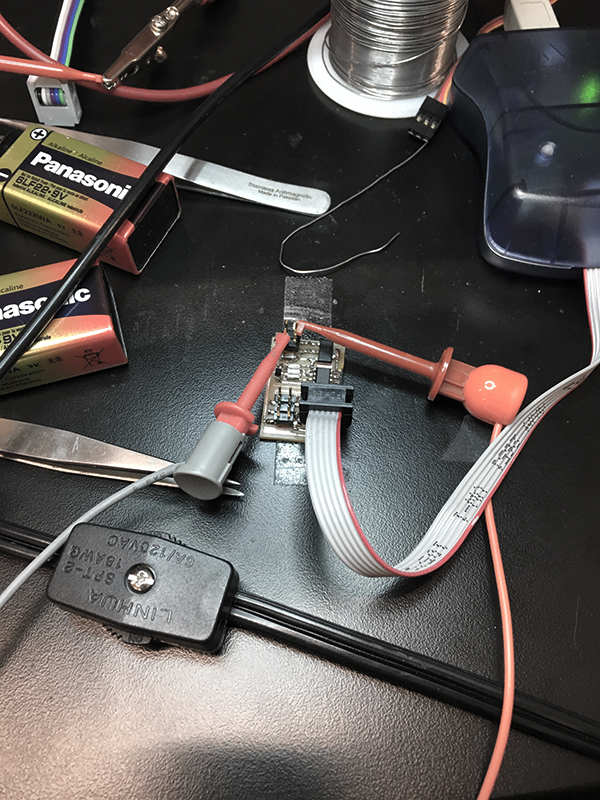
The power was connecting once the board was finished yet when trying to program with avrdude it kept giving me the rc=-1 connection problem. After checking all the connections I could not figure it out so I decided to make another board thinking I missed something on this board.
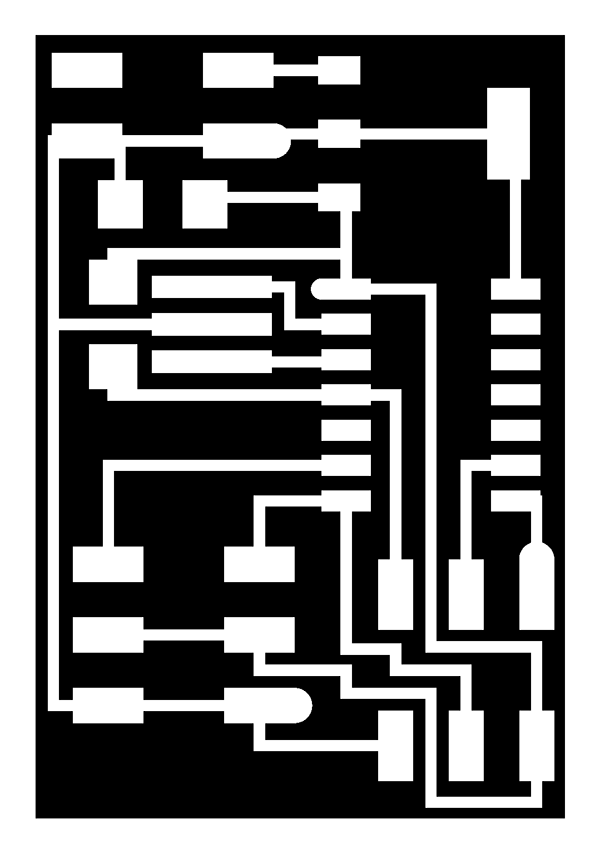
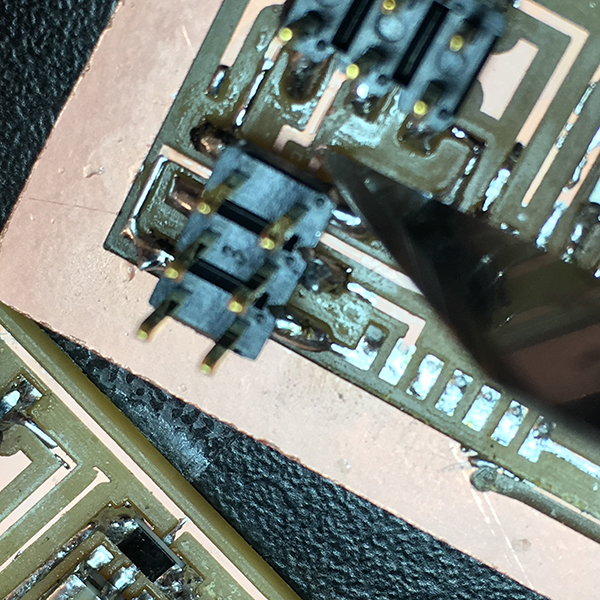
Still no luck - then in checking one connection I found a short - the beeper beeped when I accidentaly when over a power and ground connection and I found the culprit, the two traces in the photo below were not properly milled out because the distance between them was so small that the bit did not go in it, so I just severed the connection with an exacto knife.

I also made two accelerometer booars for two weeks ago - the goal is to link up the servo movement information with the accelormeter information.
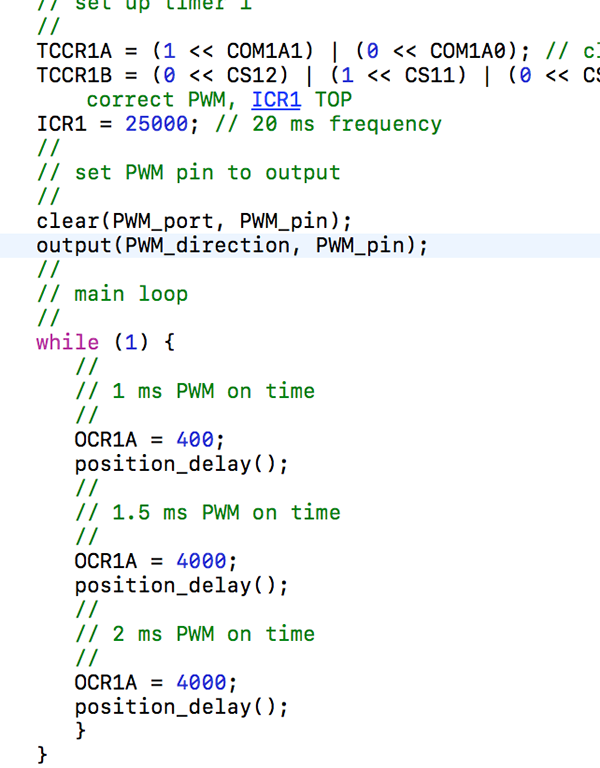
After much tinkering Rob helped give another crash course on PWM's and it makes perfect sense in theory but once I dive back into the code I am still quite a bit lost on where exactly the positioning is etc. Other than that things went pretty well, I am thinking of making a fabduino so that interaction with the servo can me more GUI friendly.