Inputs
Picking the accelorometer as a starting point to start to read orientation in space and translate it to motion.
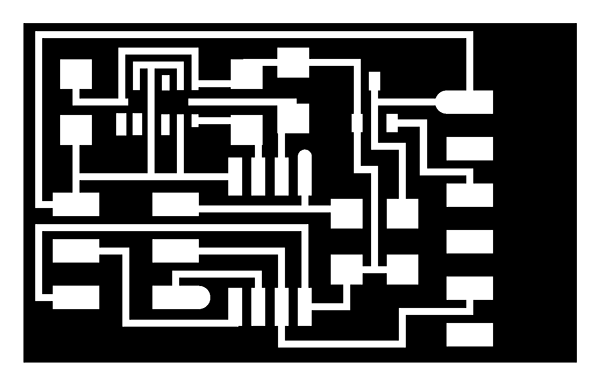

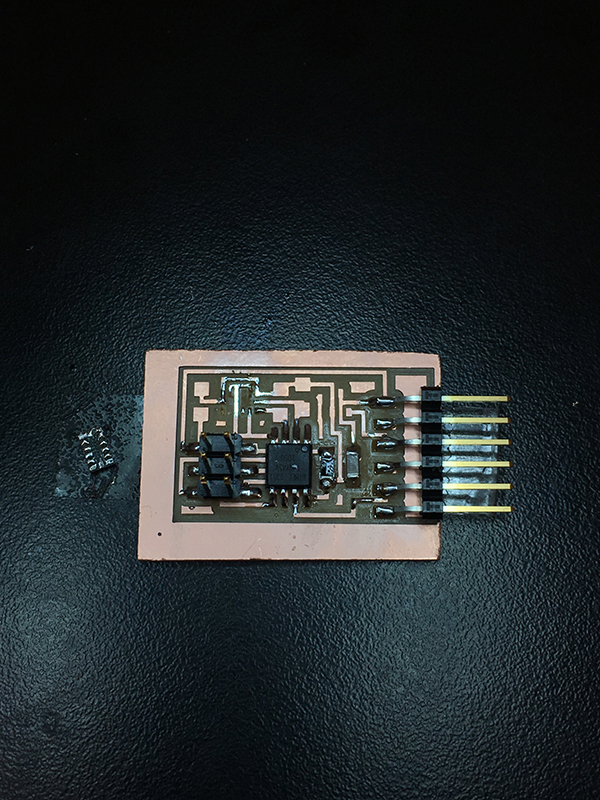
Using the technique of reflow was a lot more difficult than anticipated, as the pads on the accelorometer are very small and the possibility of misalignment or shorting is very high - which is exactly what happened.


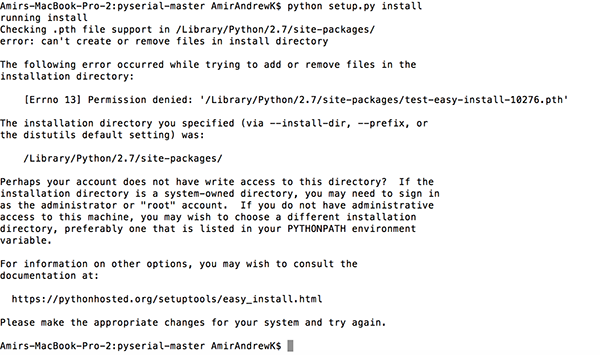
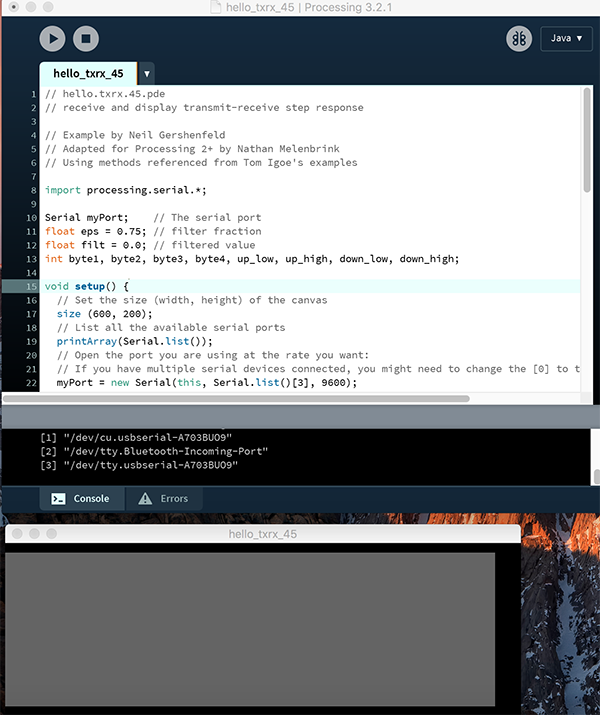
There was a lot - a lot of problems reading c-code using python - using the newest version of python it kept throwing a "tkinker" error - after including those libraries, there was still no luck. Even trying processing did not work, downgrading to python 2.7 seems to be the only solution.

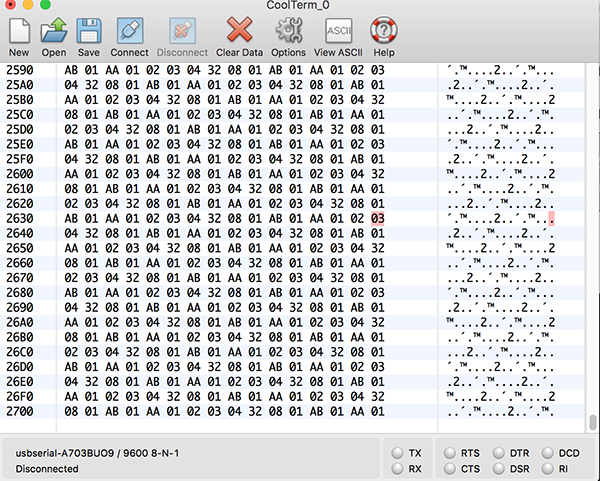
Once all the code was uploaded - only the x values were reading, and they were way incorrect - they were also throwing off the values going from 0 - 1053. Making a whole new board did not seem to help.
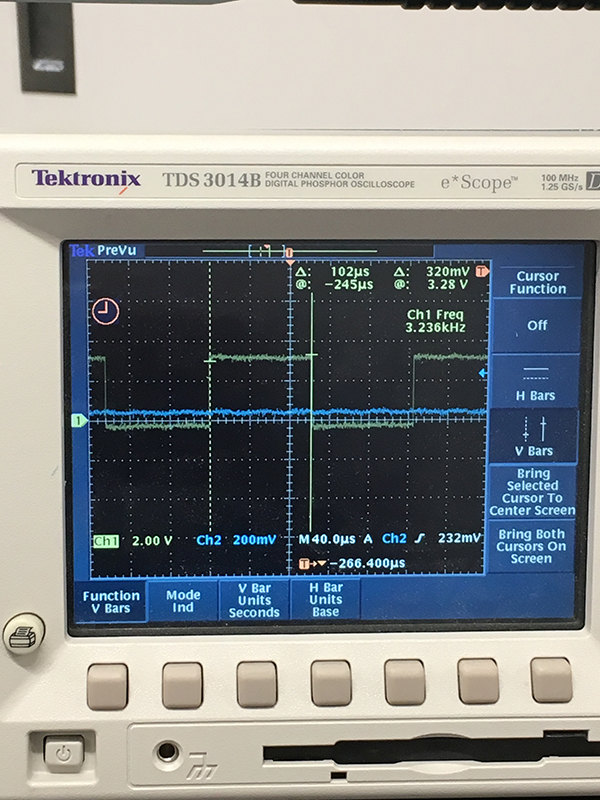
The second board did not work - and even checking bit rates etc everything seemed fine. Turns out it was a reflow problem - shifting the chip more to the top than what seems right seemed to catch the right values and it worked.
