Input devices
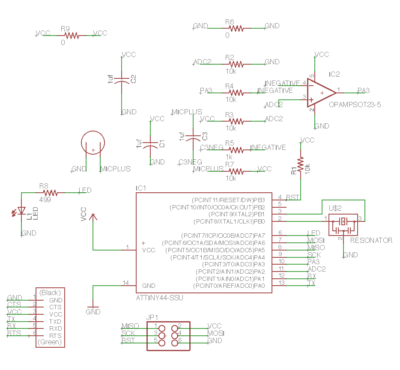
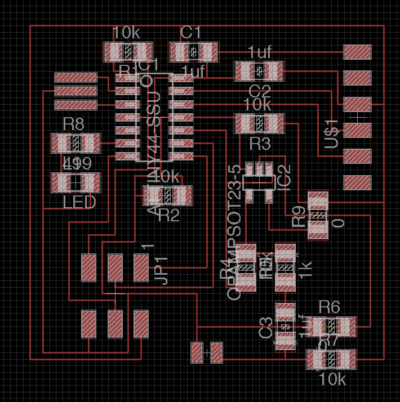
For this week I thought about making a board with an LED that detects the sound and extract a certain pitch, and flash the LED with the pitch. First I modified the original board for embedded machining to accommodate a microphone. I incorporated op-amp in the circuit
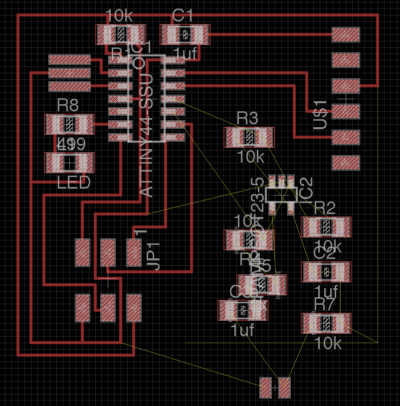
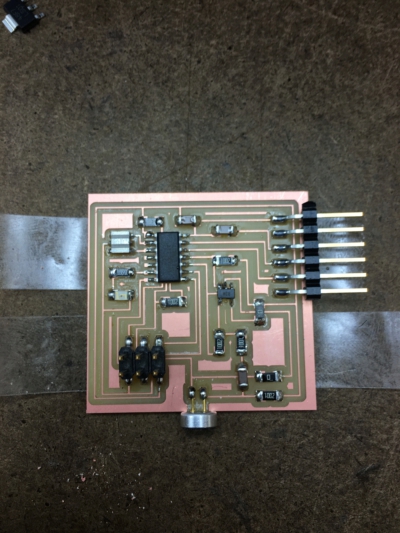
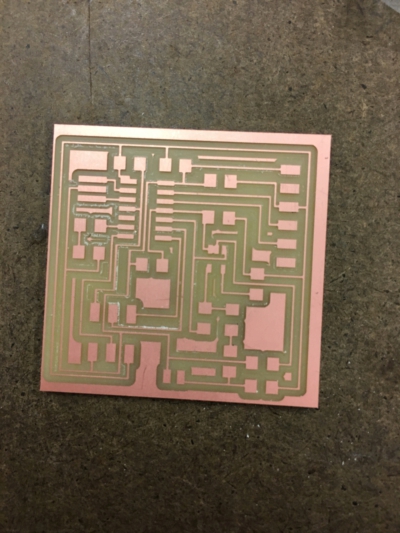
On the first sight the board looked okay, but later I realized two mistakes in the design of the board, first the routes were large for the distances between small pins, I used 10, as opposed to 6, and this caused the pins on the op amp to fuse to one. Moreover, I did not spot the crossing in the wiring, which made the board not usable.

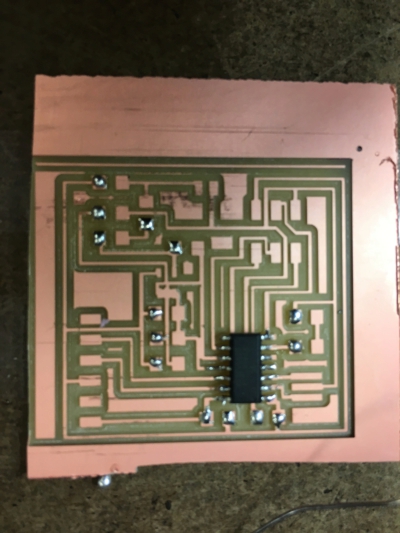
I went back and redesigned the board using zero ohm resistors, and that solved the crossing. Moreover the smaller mill(6) solved the fusing to some extent. Still one of the pins remained fused. I used an exacto knife to separate the pads.
I finished the hardware design, but did not succeed to make board communicate with the computer. (error in compilation of c code : REFS2 was undefined). I redesigned the board and integrated the work for the final project for sonar instead, please find more information in the final project.