3D printing and scanning
3D scanning
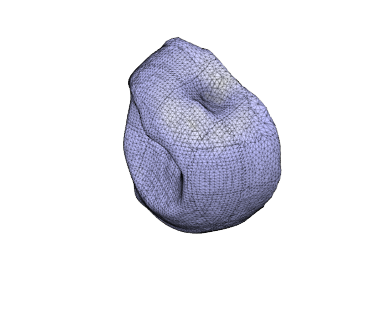
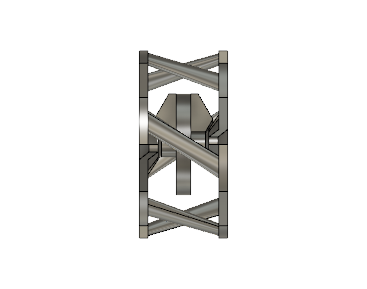
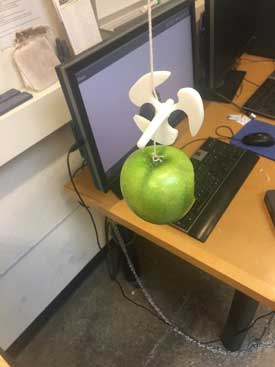
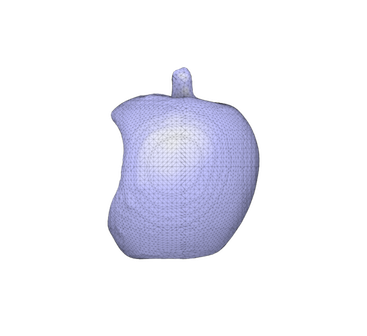
In this part I decided to scan an apple! given the small size of the apple I decided to hang it from the ceiling to get a better 3D image. First try was was with normal lighting conditions. I couldn't get reliable detection, so I decided to add extra non symmetrical features to the object to have a better detection. I then removed the extra object in the program.

After multiple trial I was able to get a stable 3d image of the object. Some post processing was necessary to correct for the holes, rope and the attached object to the rope. even though the resolution of the sensor is below 1mm (according to the technical sheet) I did not get such resolution
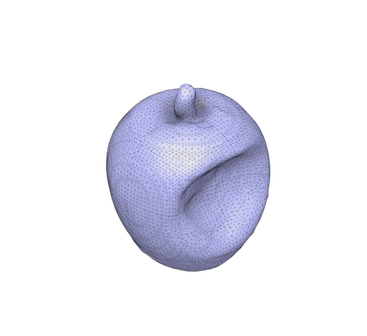
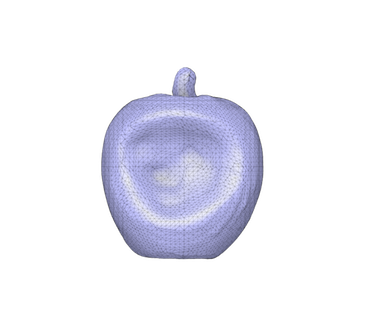
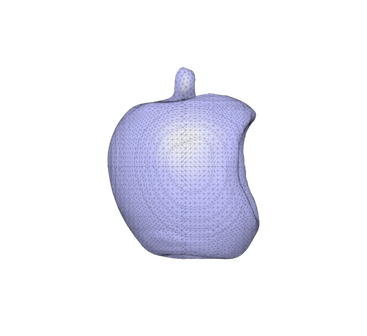
Next I decided to modify the surface of the object or the background to bring the resolution closer to device limits. I first tried adding visual marker to make the object more distinguishable, however this did not help! I also tried separating the background, sacrificing the full 3d imaging, and got similar results.