This week we had to work in our shop sections to build a CNC machine based on Jake Read's design. The architecture section decided (after considering several much less feasible ideas) to make a watercolor painting machine. To make it more interesting and potentially painful, we also decided to put it on wheels, so that it could draw on infinitely long paper. We divided into four teams: end effector, software, electrical, and mechanical. I joined the end effector team with Jackie and Joel.
The three of us met and discussed possible ways to incorporate the brush onto the existing machine. We knew that the mechanical team would be creating a flat plate that moved in x and z onto which we could attach our end effector, but we would not have access to any motors, so anything we created much be purely mechanical. I brought in my brushes and paints as examples and to try out the wrist motion. We identified three main challenges: holding different brushes, supplying paint to the brush, and making the brush move naturally to mimic a human wrist.


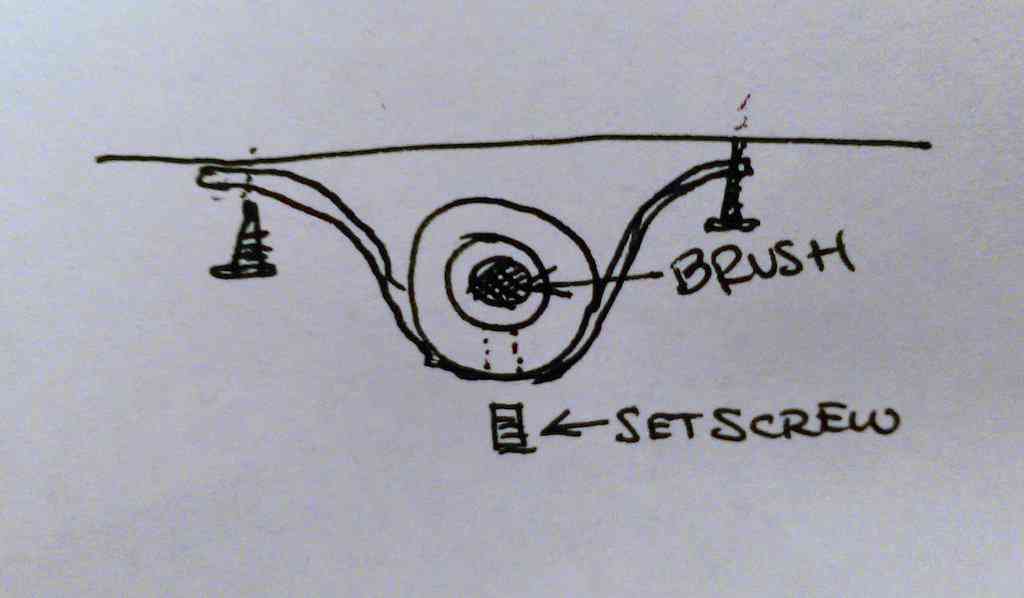
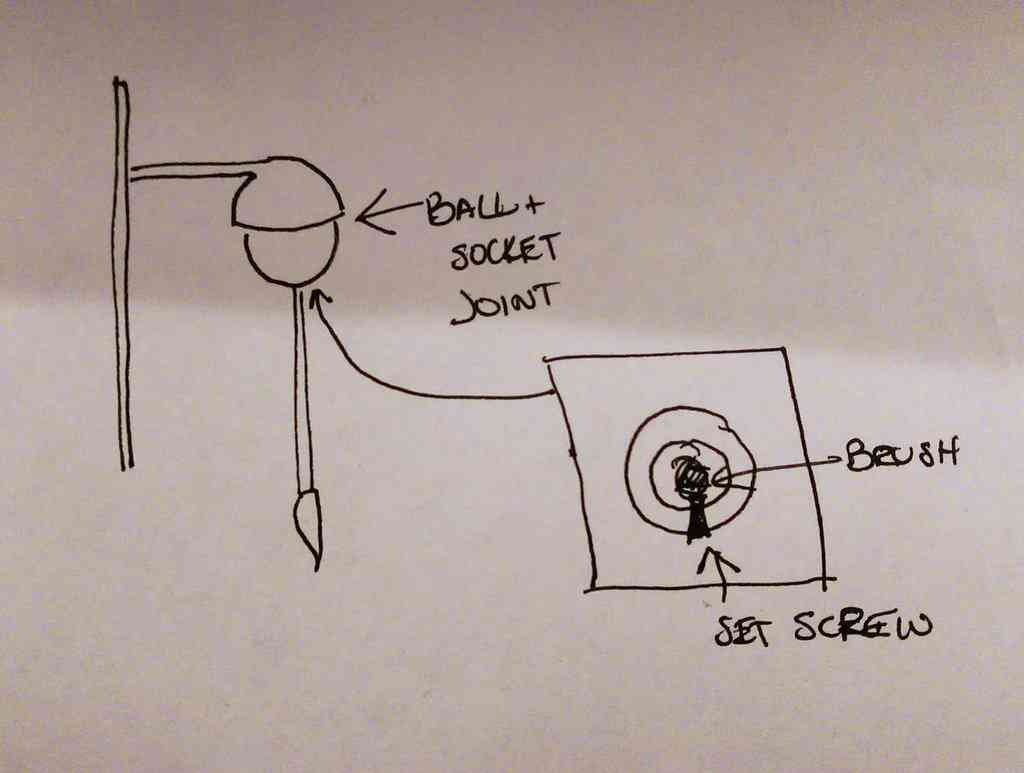
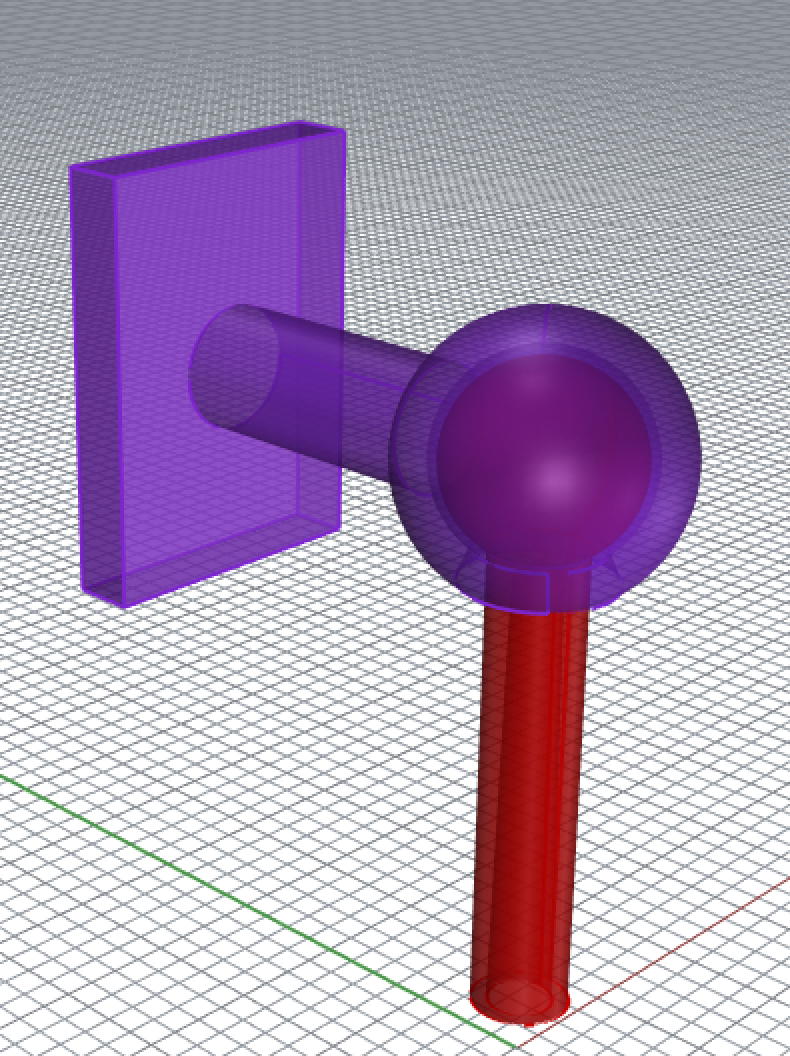
We mainly focused on the natural motion at first and came up with a few different ideas. I sketched a basic configuration with no naturally movement as well as a ball and socket configuration that could be 3D printed. The ball and socket would allow 360 degrees of motion with the other socket tapered to resist significant tilting. However, it would also be tricky to print due to the tight tolerances and need for dissolvable supports to be able to print in its assembled form.
We ended up going with Jackie's design for a gyroscopic holder instead, which allowed slight rotation around two perpendicular axes. We fought several broken 3D printers before managing to get one that worked, so in the meantime we tested the idea in acrylic on the laser cutter as well. Unfortunately, the acrylic version was much too brittle and would not bend as desired. Once we finally managed to print the holder, we confirmed that PLA did flex the way we wanted, but the connections were slightly too thick at the moment. Jackie took on the job of testing thinner joints while I worked on the challenge of supplying paint.

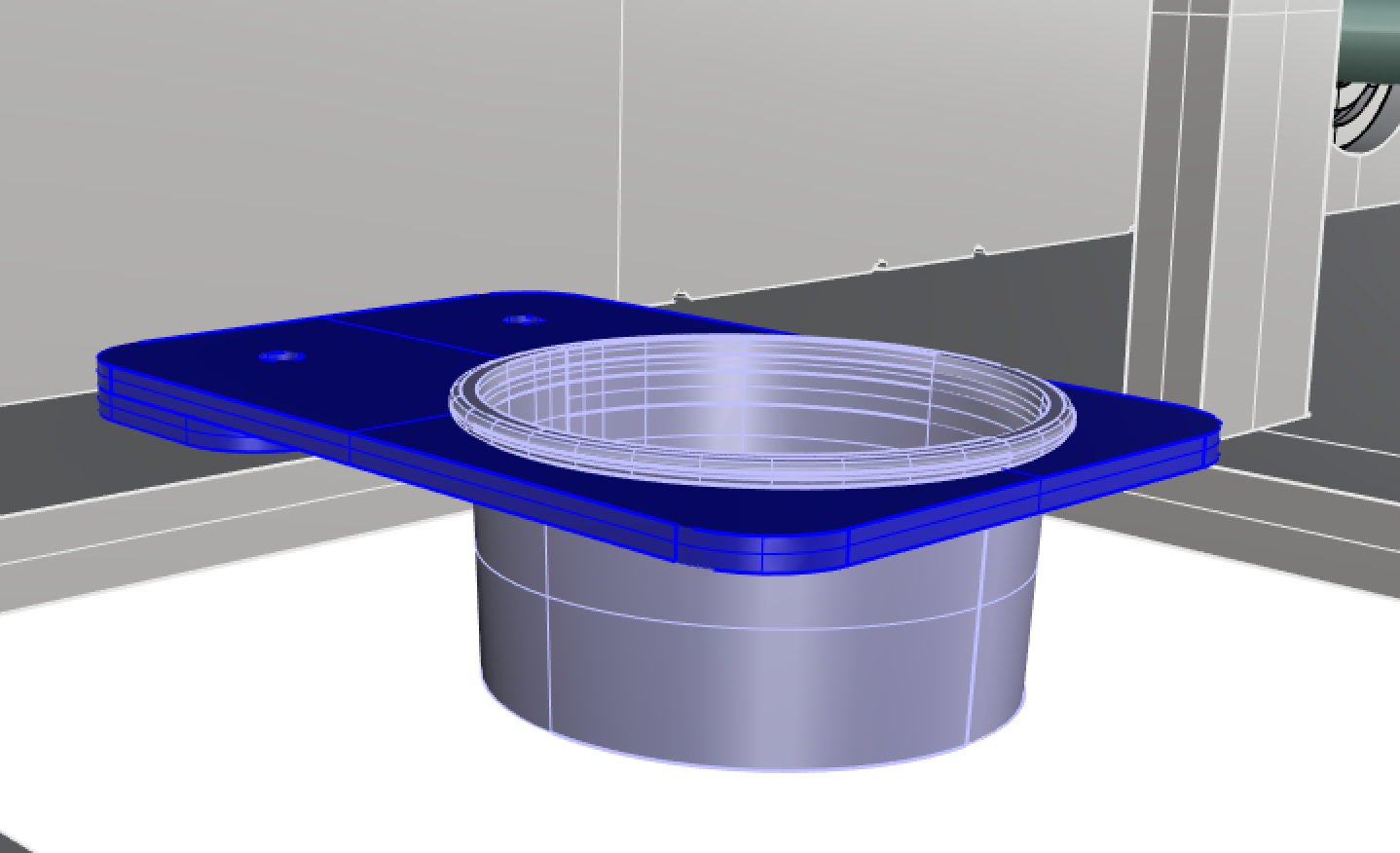
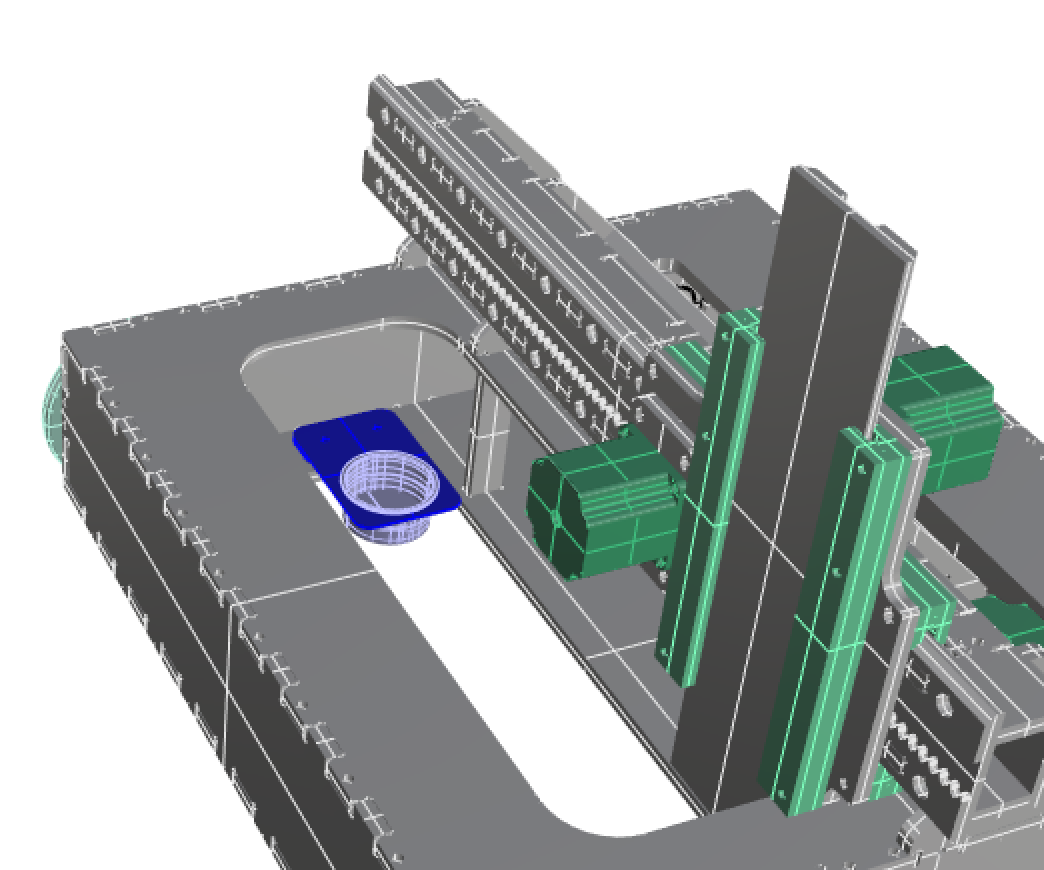
Because the machine itself would be moving, we needed a paint supply that could travel with the machine, but also be easily accessed by the brush, meaning it had to be along the primary x-axis and rest at a reasonable z-height. We considered providing space for multiple colors, but it would have occupied too much space and restricted the drawing area, so we chose to go with a cupholder that allowed for easy switching of cups of ink or paint.
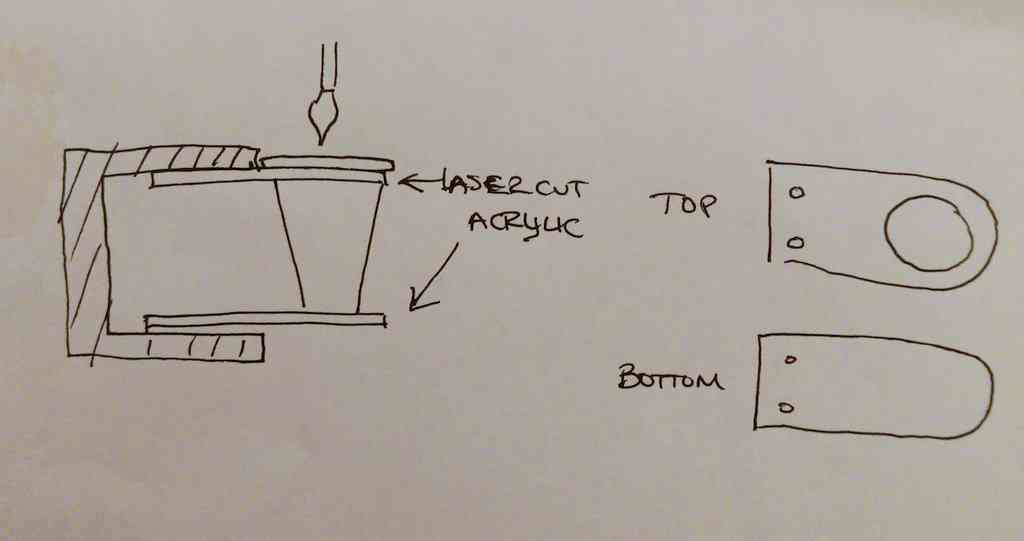
I found some short plastic cups that fit our needs, and designed an acrylic piece to perfectly catch the lip of the cup and screw onto the base of the machine. I cut out the piece on the laser cutter and also cut a couple extension pieces that would elevate it off the surface of the machine a bit if the cup ended up too close to the ground. Based on the Rhino model, it would have been off the ground with just the single acrylic cupholder, but I worried that the wheels were not accurate in the model, so I didn't want to cut things too close. Due to discrepancies in units (mm in the model, inches on the laser cutter) as well as some tight fits on the scrap acrylic I found, I had a few failures, but the final cupholder fit perfectly.

The three of us met and discussed possible ways to incorporate the brush onto the existing machine. We knew that the mechanical team would be creating a flat plate that moved in x and z onto which we could attach our end effector, but we would not have access to any motors, so anything we created much be purely mechanical. I brought in my brushes and paints as examples and to try out the wrist motion. We identified three main challenges: holding different brushes, supplying paint to the brush, and making the brush move naturally to mimic a human wrist.
We mainly focused on the natural motion at first and came up with a few different ideas. I sketched a basic configuration with no naturally movement as well as a ball and socket configuration that could be 3D printed. The ball and socket would allow 360 degrees of motion with the other socket tapered to resist significant tilting. However, it would also be tricky to print due to the tight tolerances and need for dissolvable supports to be able to print in its assembled form.
We ended up going with Jackie's design for a gyroscopic holder instead, which allowed slight rotation around two perpendicular axes. We fought several broken 3D printers before managing to get one that worked, so in the meantime we tested the idea in acrylic on the laser cutter as well. Unfortunately, the acrylic version was much too brittle and would not bend as desired. Once we finally managed to print the holder, we confirmed that PLA did flex the way we wanted, but the connections were slightly too thick at the moment. Jackie took on the job of testing thinner joints while I worked on the challenge of supplying paint.
Because the machine itself would be moving, we needed a paint supply that could travel with the machine, but also be easily accessed by the brush, meaning it had to be along the primary x-axis and rest at a reasonable z-height. We considered providing space for multiple colors, but it would have occupied too much space and restricted the drawing area, so we chose to go with a cupholder that allowed for easy switching of cups of ink or paint.
I found some short plastic cups that fit our needs, and designed an acrylic piece to perfectly catch the lip of the cup and screw onto the base of the machine. I cut out the piece on the laser cutter and also cut a couple extension pieces that would elevate it off the surface of the machine a bit if the cup ended up too close to the ground. Based on the Rhino model, it would have been off the ground with just the single acrylic cupholder, but I worried that the wheels were not accurate in the model, so I didn't want to cut things too close. Due to discrepancies in units (mm in the model, inches on the laser cutter) as well as some tight fits on the scrap acrylic I found, I had a few failures, but the final cupholder fit perfectly.