I began the week first by using the example board for Ultra Sonic Sensor which was provided to us on the class website. Ultrasonic is a high frequency sound (typically 40KHz is used). A short burst of wave ( often 8 cycles) is sent out by the speaker. The microphone listens for an echo. The time taken is recorded. Using calculation L = C X T/2
L : Length
C: Speed of sound in air (344m/s at 20 degrees celcius)
T : time taken is divided by 2
The distance is determined.

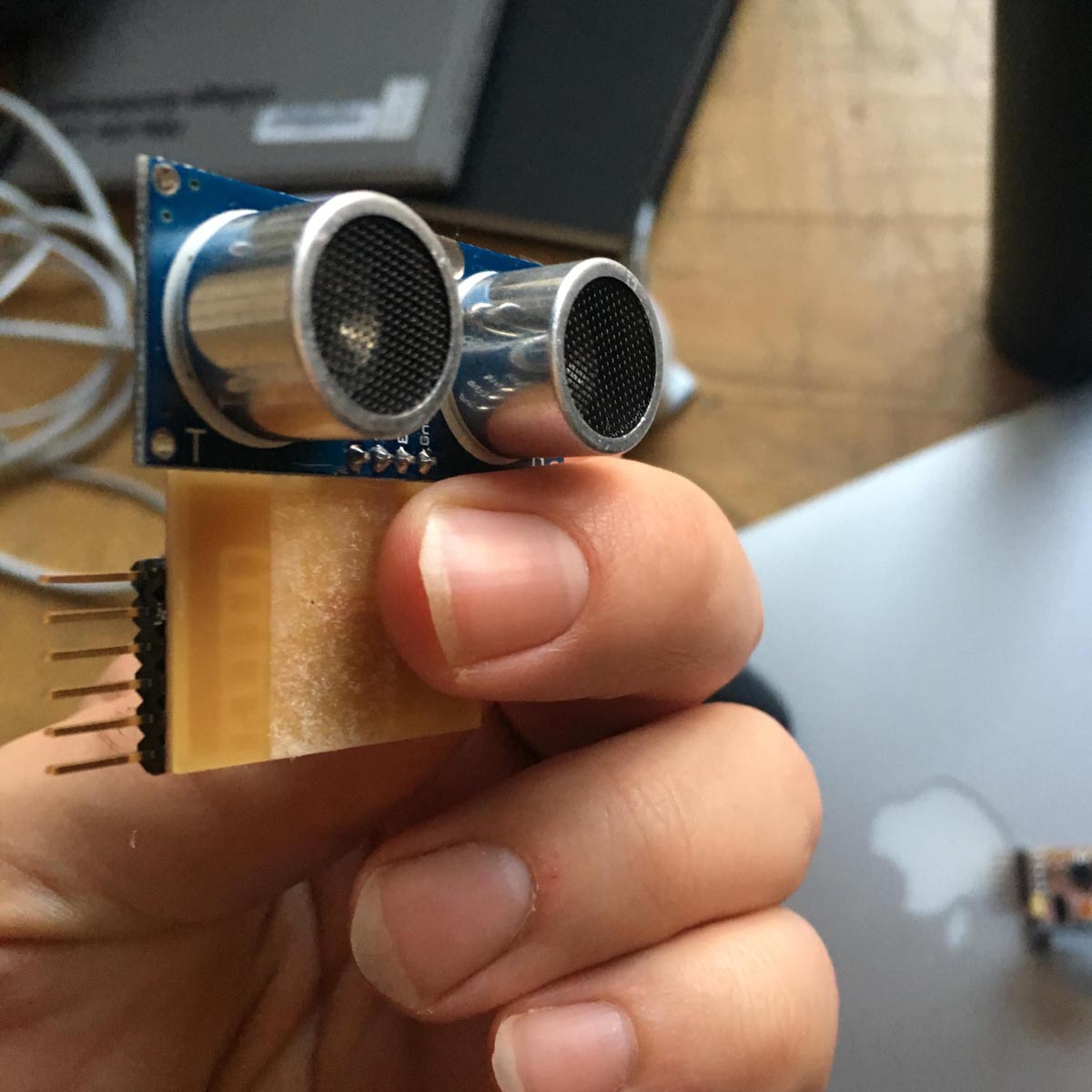
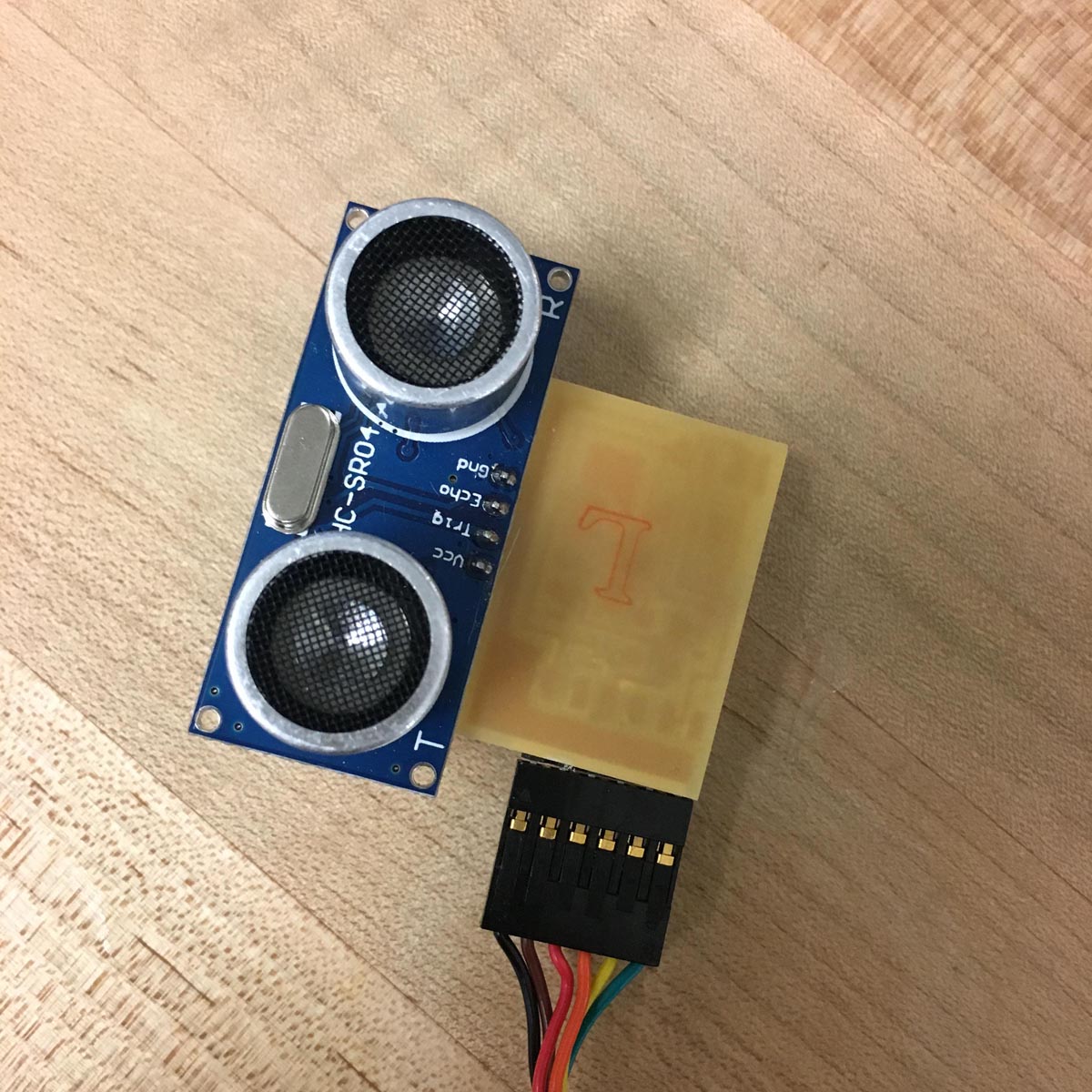
You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion .You can calculate the range through the time interval between sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
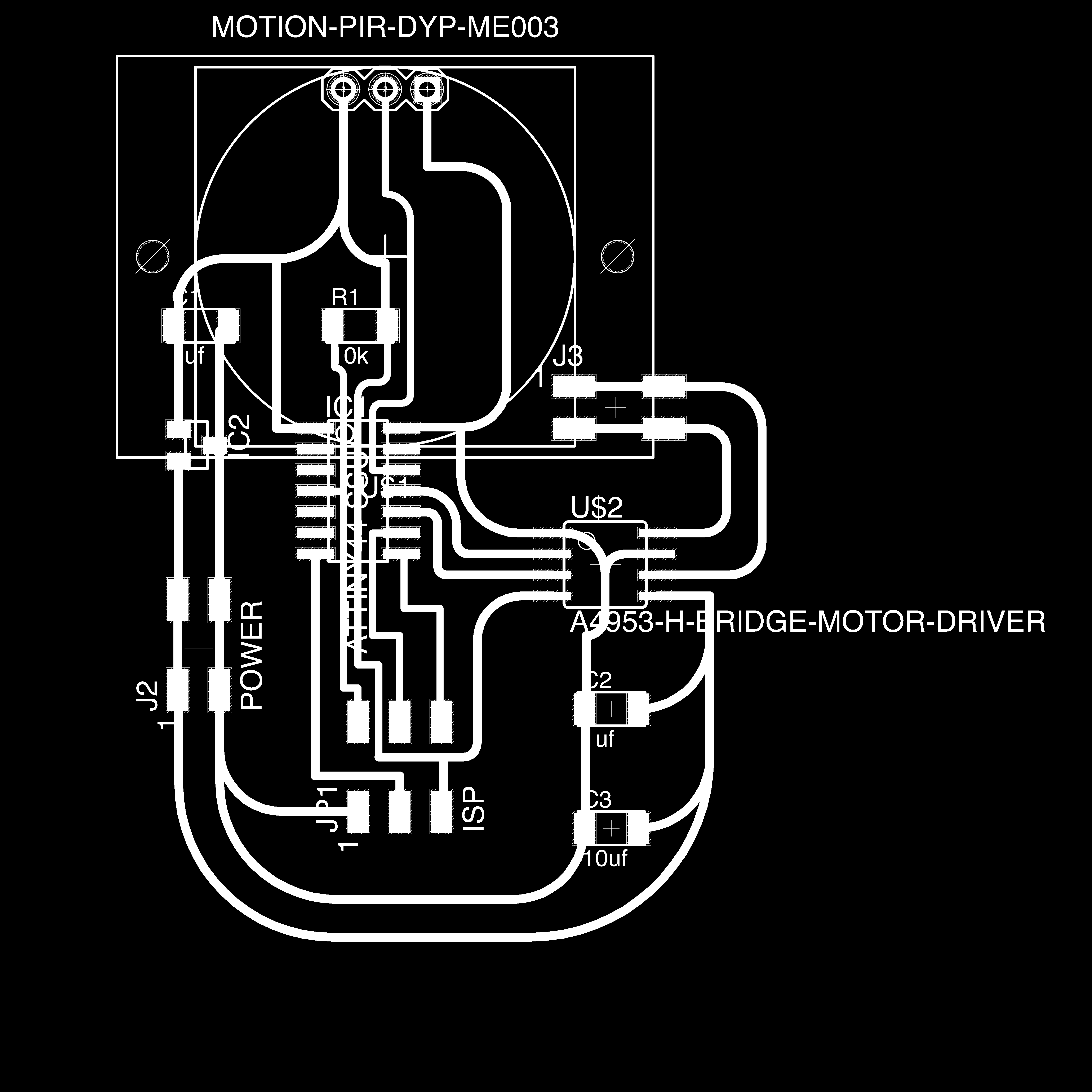
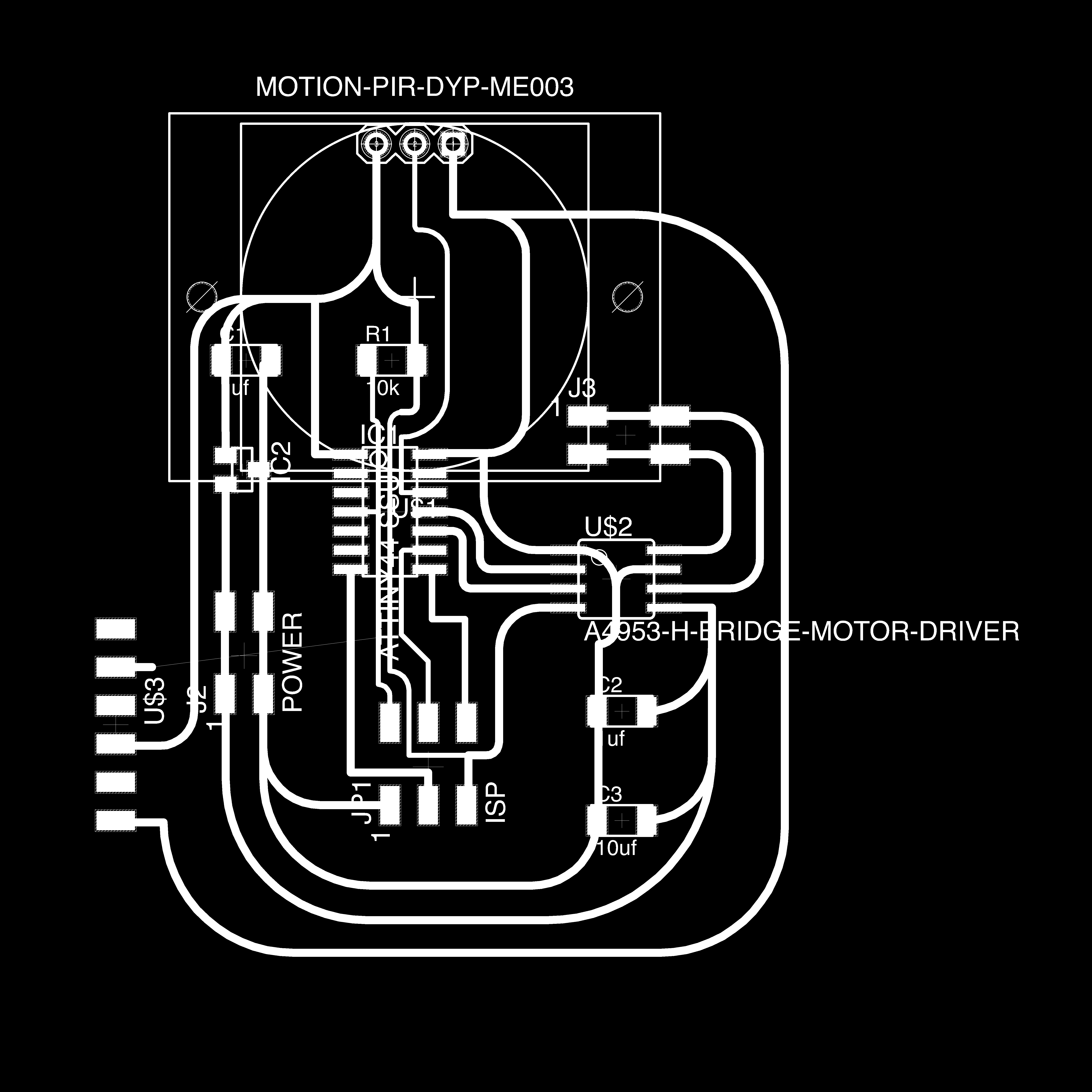
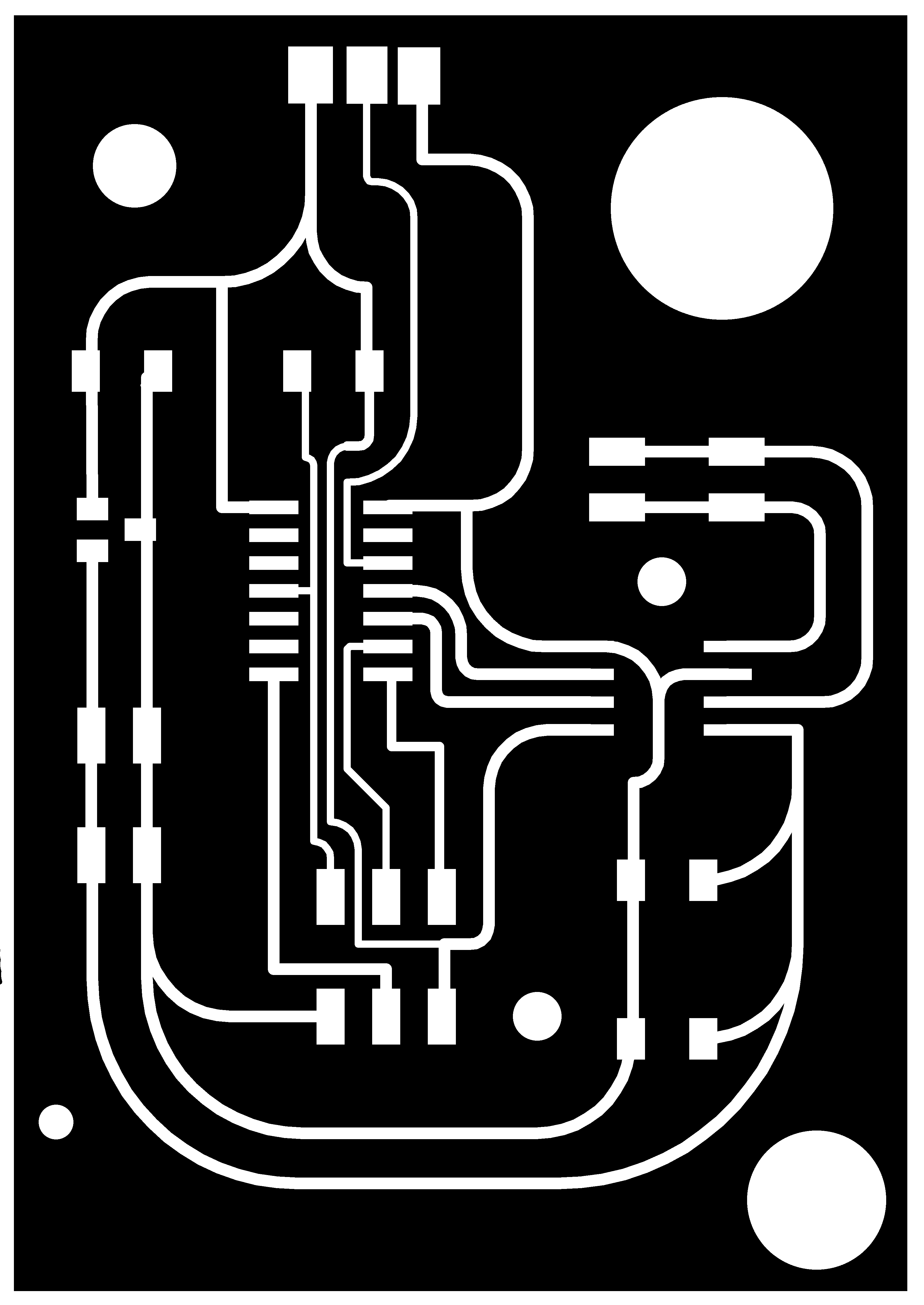
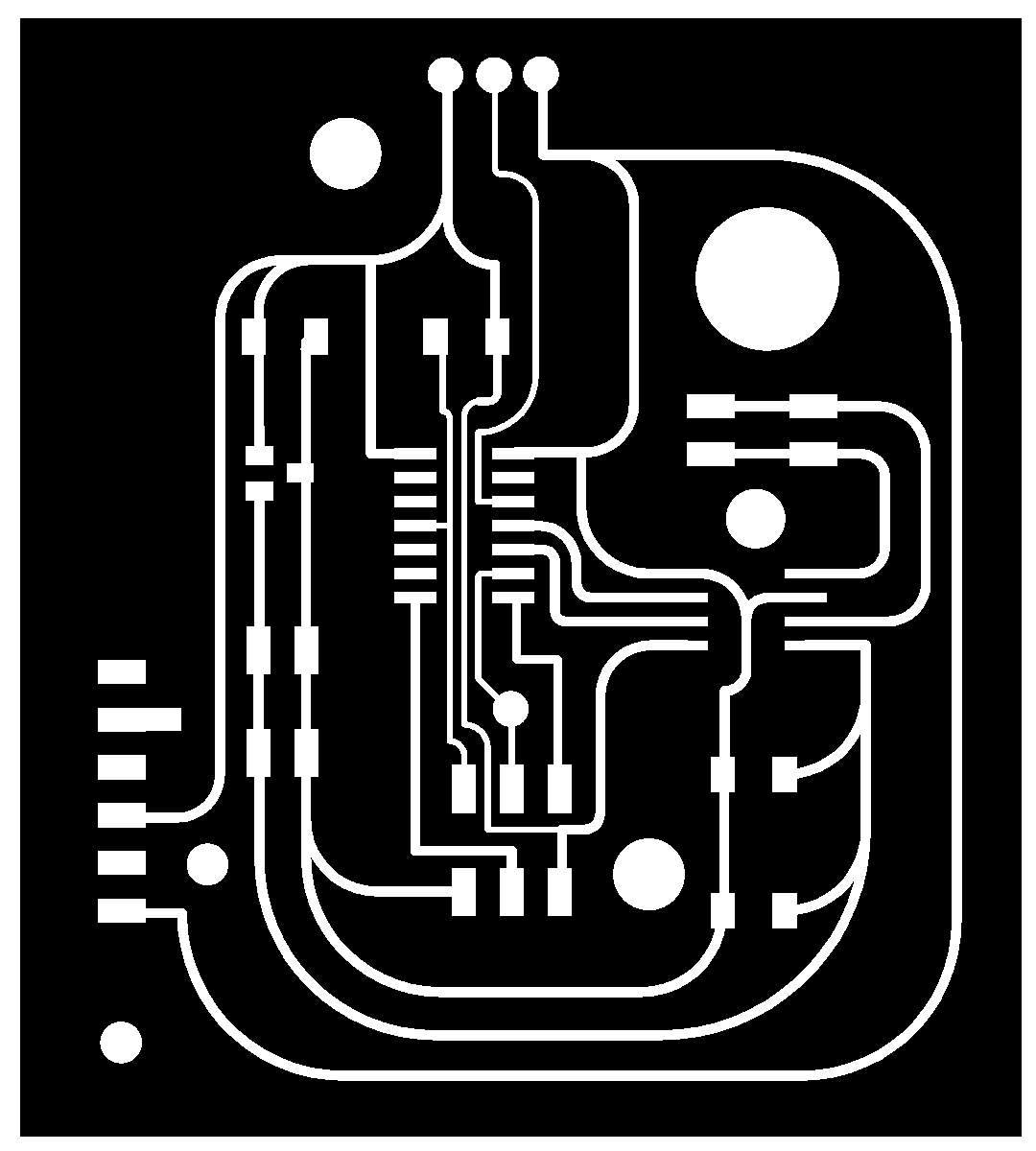
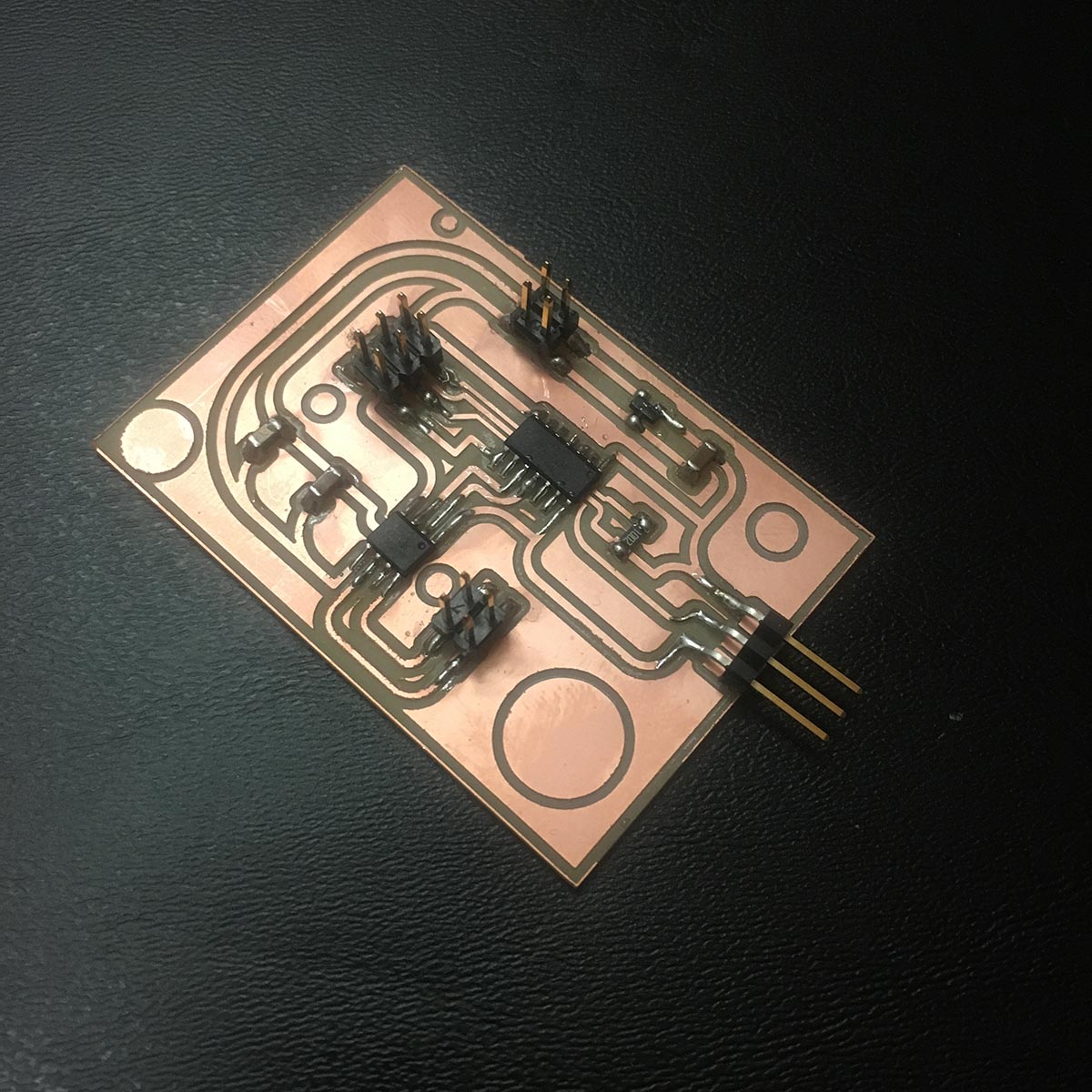
The next step was to create my own Motion Sensing Board as it will relate to one of the sensors I am planning to use for my final project. I also want to alter the board which was given to us as an example - I want to use FTDI pins to connect the sensor to the board instead of soldering the sensor directly to the board.

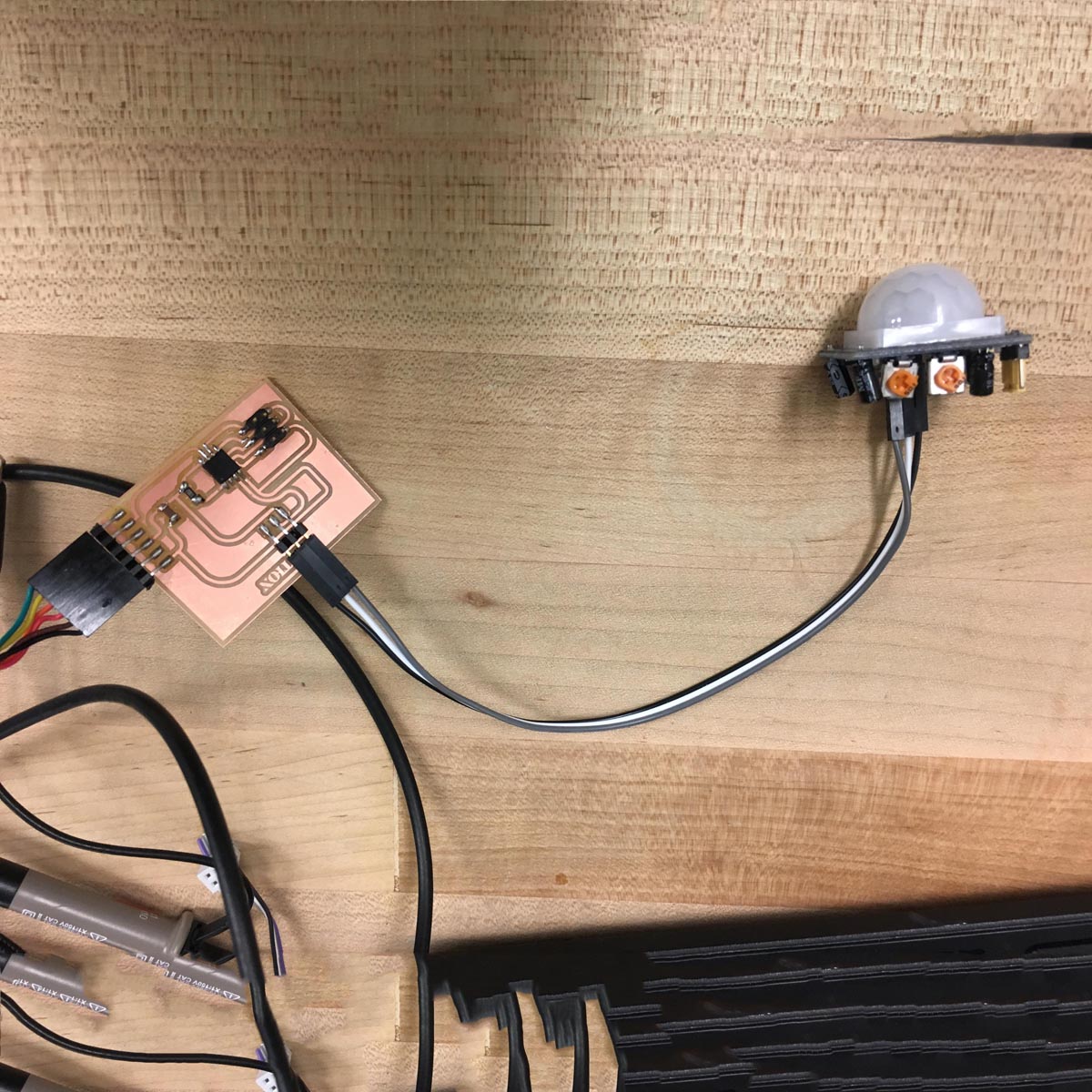
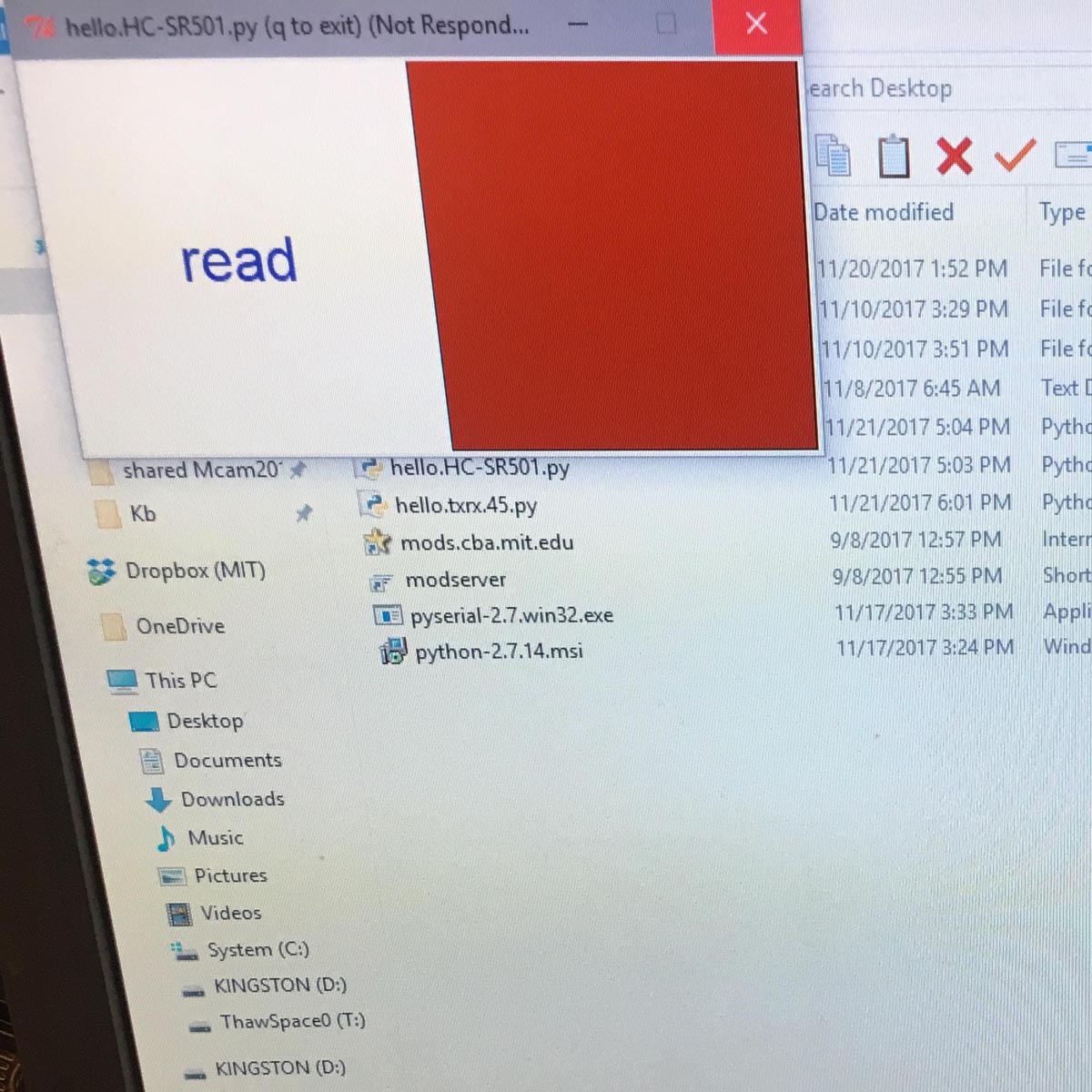
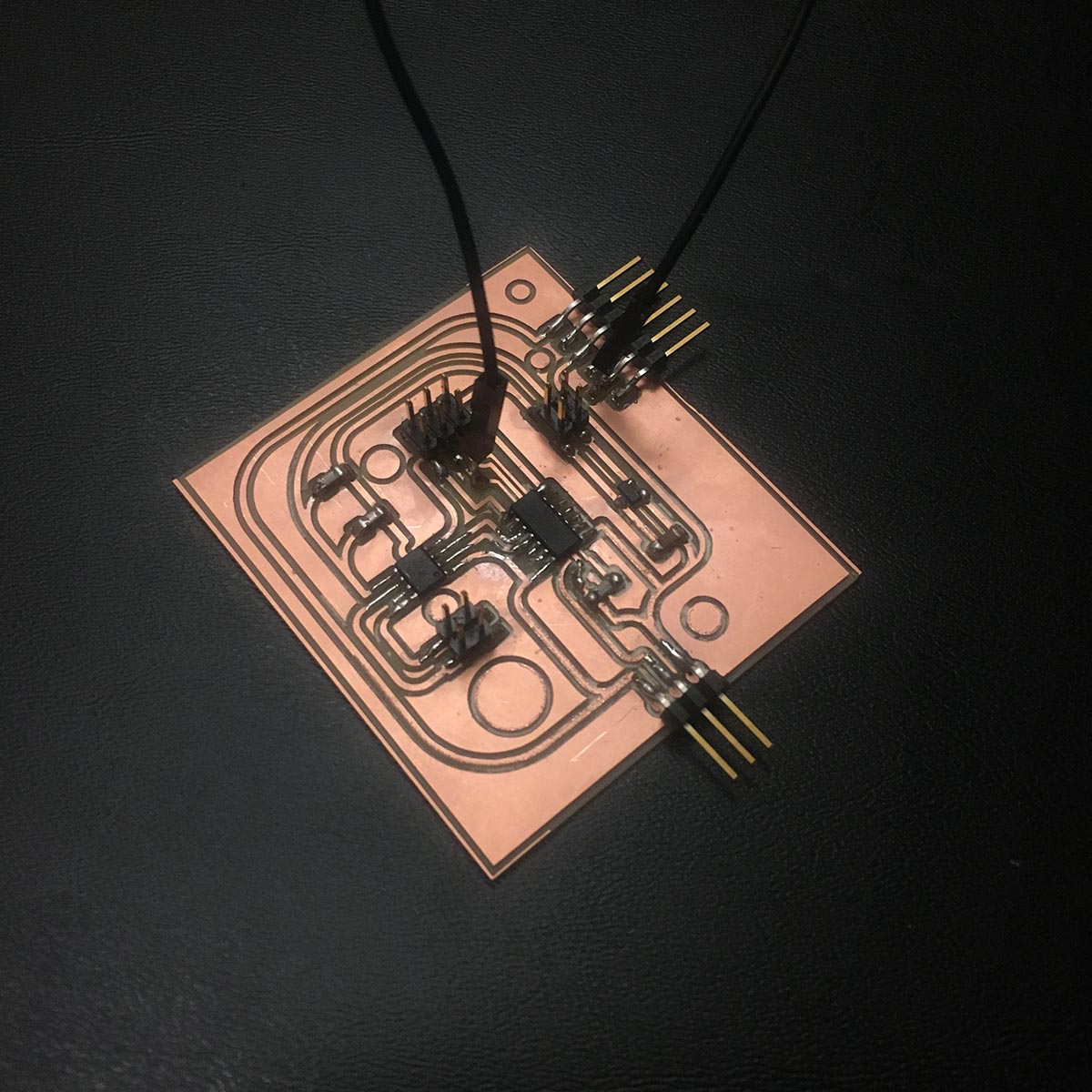
With the help of Will from the CBA shop we could not get the sensor to read through the python script. We tested the board to show that there were 5 volts of power powering the sensor and returning, but there was not data being output to visualize on the python script. We confirmed the correct order of the pin placements based on the Senor's data sheet.
Trouble Shooting Still in Progress