I worked with my labmates to create a machine!
Our project for this week was to, as a section, produce a CNC machine of some form. After a brainstorming meeting, we decided on making a Delta Picker . I was on the software team, led by Ben . The project is well documented here , so I won't bother reinventing the wheel and describing all parts of it. Instead, I'll focus on how I specifically helped reinvent a delta picker.
But here's a picture of what we ended up making!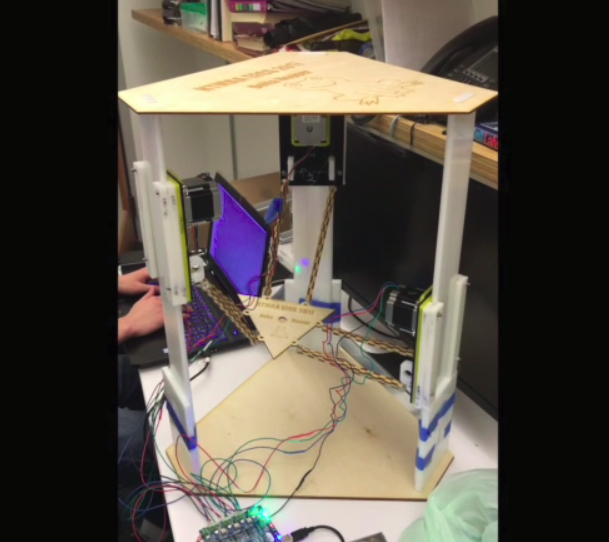
For hardware, we were given a Synthetos TinyG CNC controller, and according to Ben, no one has really done what we were trying to do with the TinyG. His plan, as documented on his Machine Design project page, was this:
I decided to work on the World2MachineCoords.
So basically, the Delta Picker will have three motors that each move up and down a vertical post. The positions of these motors will determine where on the X-Y-Z plane the end effector is. My job is to figure out what these postions are, based on where we want the end effector to go.
This report was really useful in guiding me in my calculations. I spent longer than necessary reading it, because I wanted to make sure I understood the calculations being made; primarily for my own desire to learn, and secondarily to be able to adjust the code if it needed modification.
First, I familiarized myself with the different parts of the diagram that Steve Graves has in the document. Then I started applying the trig that I learned in high school (who knew it would actually be helpful!). Here's a visualiztion that helped me a lot along the way:

Doing inverse kinematics was really fun.
I learned the mechanics of the machine and the math for taking in world coordinates and calculating the positions of the motors. However, there were two variables that I was trying to figure out how to get in the most simple way possible.It was difficult because we didn't have the actual measurements of the machine, and the ones we did have often kept changing. I used approximations for the majority of the time I spent on the code. When Ben and I were debugging, however, we got a lot of errors - such as the square root of negative numbers! We figured out it was because we had chosen dimensions for the machine that weren't actually feasible. Subsequently, we chose better numbers. Later, I switched to the real, precise measurements at the very end, when everything was actually done.
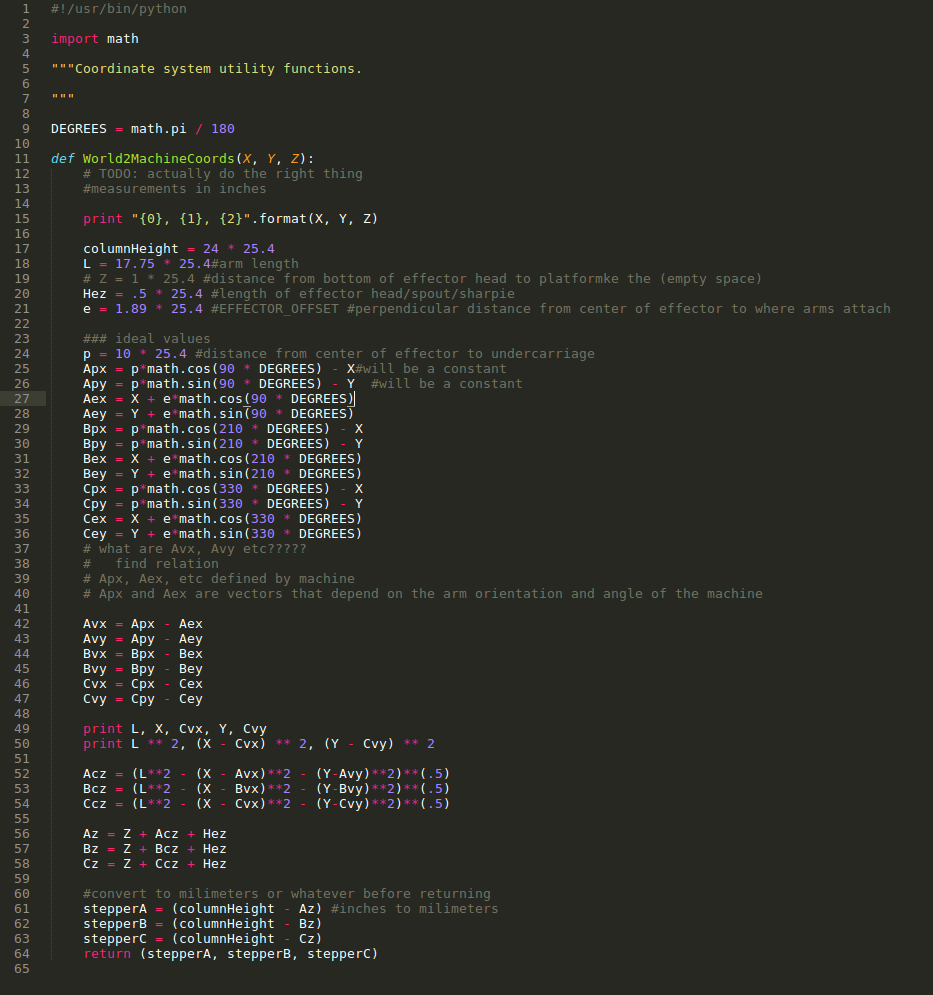
Here's my final code: