holding hands from 3000 miles away
Background
In our first week, Neil introduced a variety of computer aided design (CAD) tools. Our assigment: “model (raster, vector, 2D, 3D, render, animate, simulate, …) a possible final project”. After lots of brainstorming*, I found one idea most compelling.
My boyfriend (Yanni) and I want to hold hands from across the country.
What could allow us to do that, allow us to feel like we are holding each other’s hands, and actually convey our physical action? Can this happen at almost the same time?
Ideas
1) We each have molds of each other’s hands that are robotically controlled to mirror the activity of the other person. 2) We each have gloves that monitor our motion + simulate the feeling of the other person’s hand. 3) Use a leap motion to get the hand tracking data (How does this complicated with the introduction of the robotic hand into the view of the leap motion)
Design Considerations
- The hand should be warm and soft –> feel realistic
- The hand should have a very similar form as the hand being represented (The hand I hold should be about the same size as Yanni’s hand).
Related Work
OPENBIONICS is an open-source initiative that focuses on the development of affordable, light-weight, modular, adaptive robot hands. The bio-inspired robotic hand they created uses acrylic for the body and silicon sheets for the flexure joints. Roboticists at Cornell created a soft robot hand with touch sensitivity. The soft robotic hand is hollow–they fill it with compressed air to give it its shape. It seems that it’s an active area of research to robotic hands that can sense. Luckily, that’s not what my project aims to do.
Can we 3D print soft materials? (2015)
On GrabCAD, I found a bunch of hand models:
- This one looks like it’s from an old video game
- These look very realistic
- This is Adam’s hand but idk who Adam is
- Biomimetic hand–Terminator vibes
Potential Materials
Inspired by soft robots, I would like to mold some sort of flexible silicon to form the skin/body of the hand. However, the ability to lasercut hard materials and make them bend widens the possibilities. I learned about shape memory alloy nitinol (nickel titanium alloy). Nitinol wire flexes when heated up/when enough current is run through it. Depending the material used to form the hand as well as how much wire I have, I might be able to use nitinol to actuate the fingers of the hand. In order to support rotation, I will likely need another actuator.
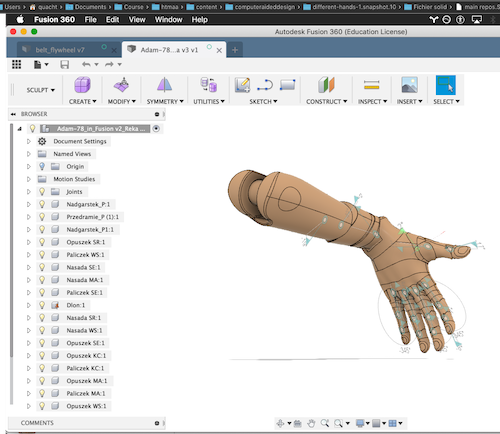
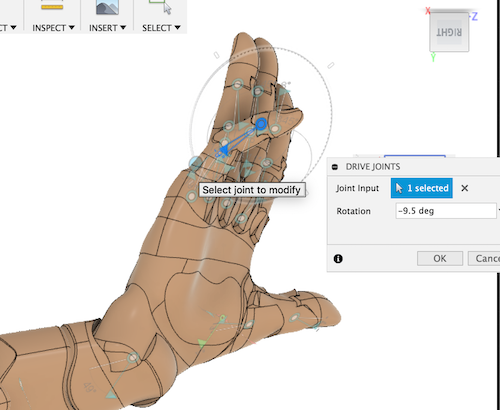
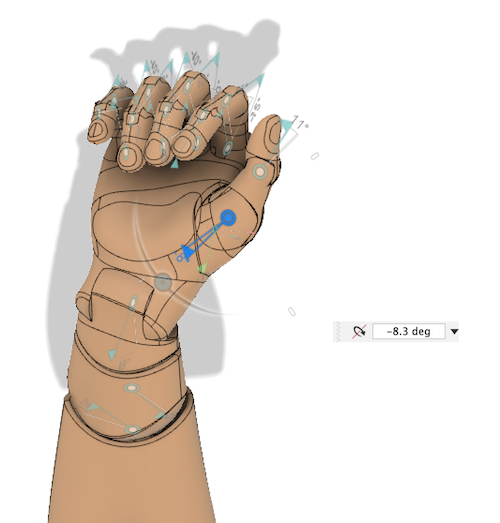
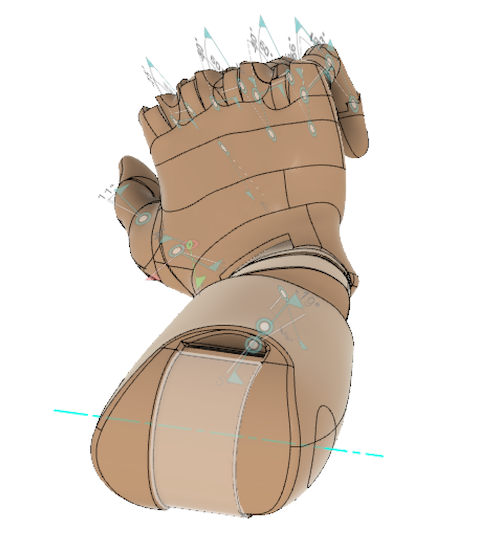
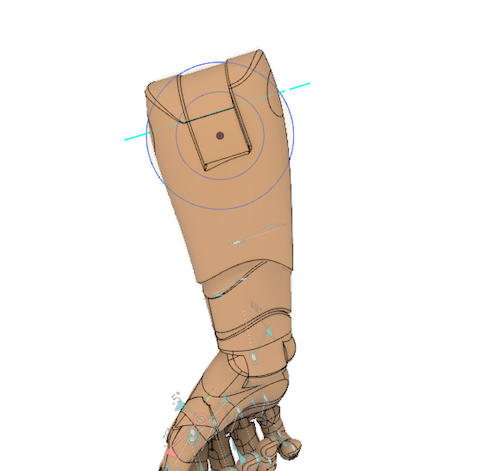
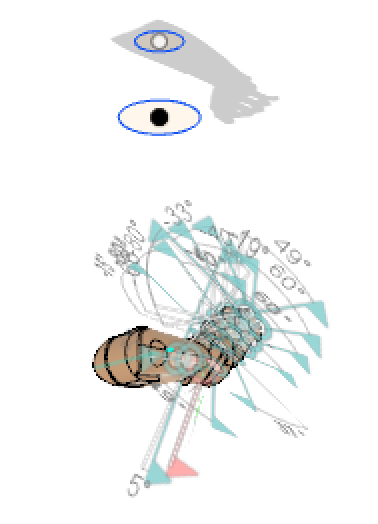
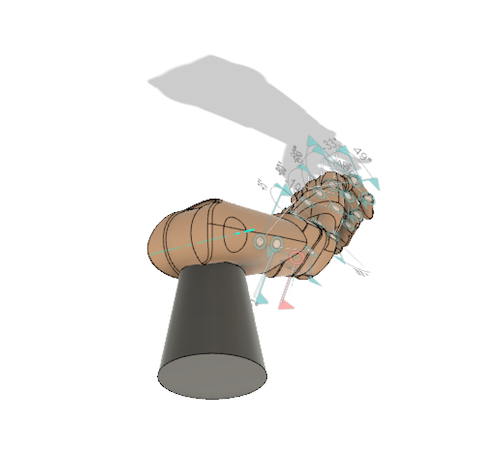
Modeling
I loaded Adam’s hand .f3d and .step file into Fusion 360. The .f3d file is great because it’s a Fusion 3D Design file and it already has information about different joints, making it easy to change the configuration of the hand using the prespecified joints. The .step is a CAD file format, usually used to share 3D models between users with different CAD systems. STP stands for STandard for the Exchange of Product. STP is a file extension for a 3-D graphic file used by CAD software. STP files are used to store 3D image data in an ASCII format, following the standards defined in ISO 10303-21 : Clear Text Encoding of the Exchange Structure.


*Brainstorming
- Some kind of interactive or functional art?
- physical blind accessible Tetris
- Modular/Compact Pampusan chair
- Hanging mobile (that does something extra idk)
Some inspirational themes/words:
- assistive technology
- accessible games
- light
- reflection
- geometry
- generative art