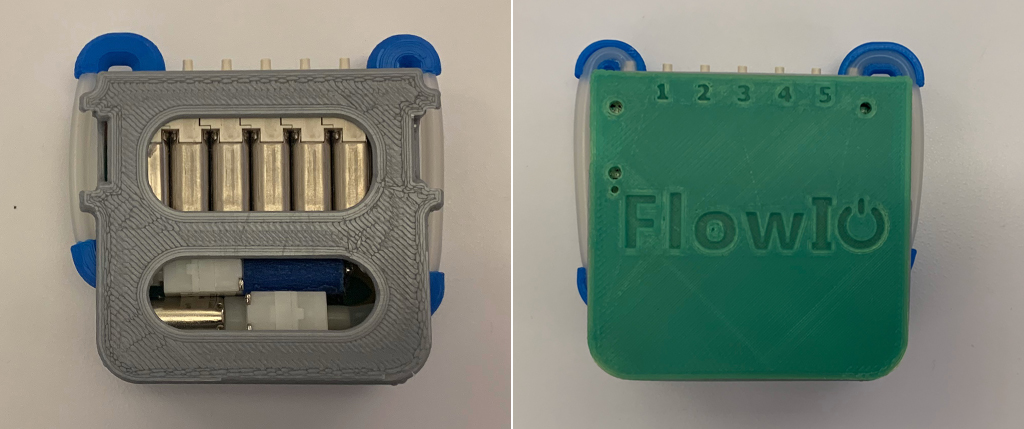
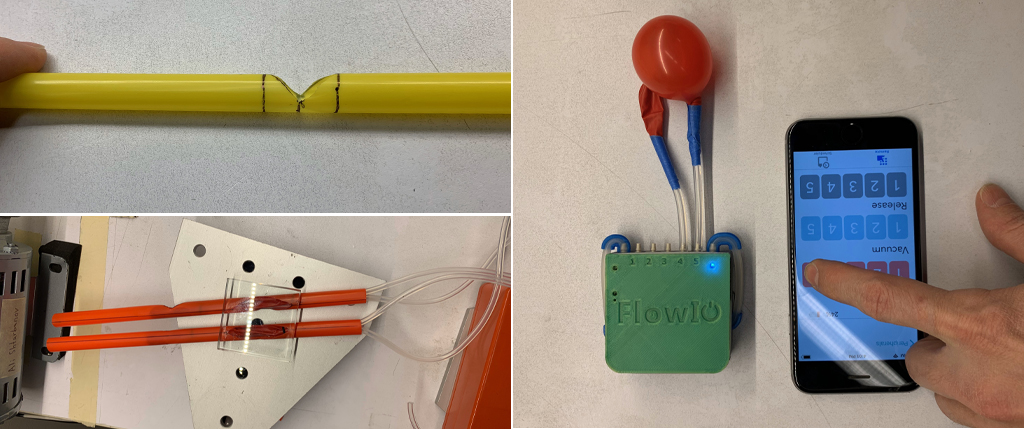
During the lecture, Ali demonstrated a fascinating prototype he has been developing at MIT that he calls FlowIO. FlowIO contains a series of 5 miniature pumps and valves which allow controlled inflation, deflation and air release. FlowIO is fully integrated to an iPhone application platform very easy to use.
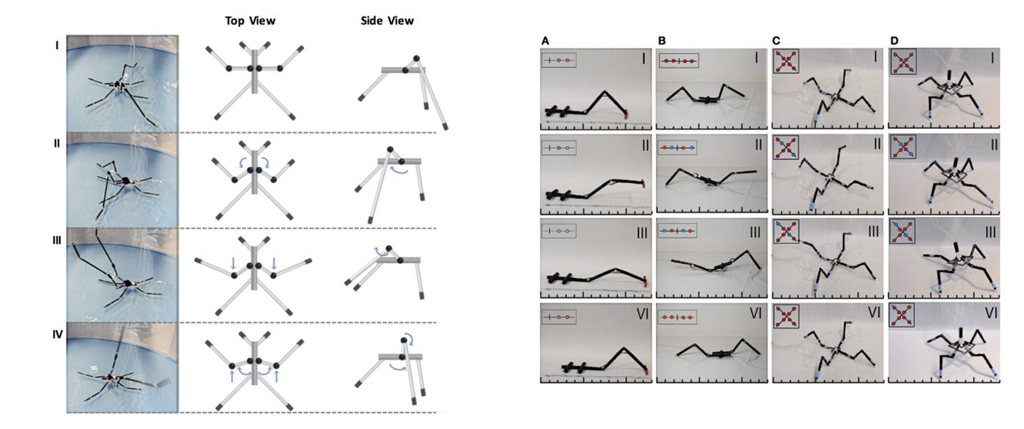
Speaking to Ali, he explained to me that Soft robots are systems built from highly-compliant materials with mechanical properties similar to those found in living tissues and he shared an article on Arthrobots inspired by the movement dynamics of spiders and insects. I was immediately inspired and felt that this could be the perfect opportunity to use FlowIO to emulate these basic mechanics. The simple construction of the prototypes made it possible to concretely build a lightweight and simple construction made out of commercial straws and molded balloons within the short amount of time required by the assignment.
molding
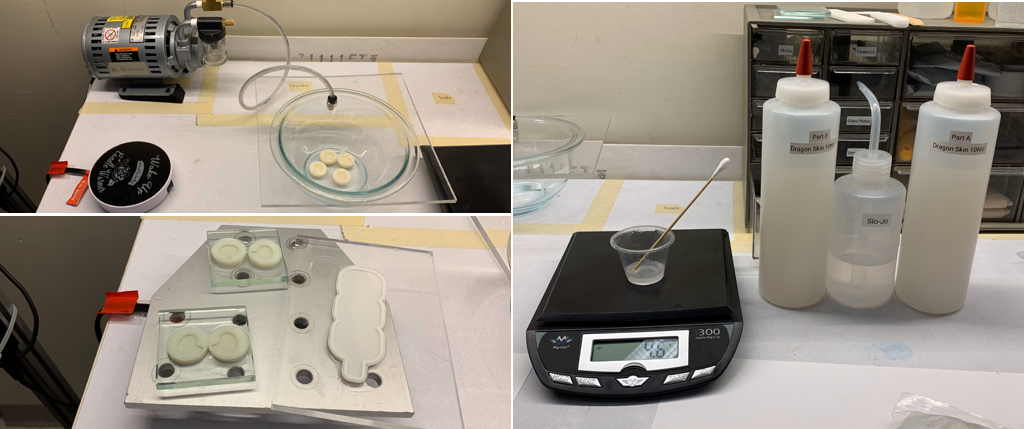
I started by analyzing existing 3d printed molds already in Ali’s archives. I identified one that could be compatible with the project. I then learnt how to mix, pour and cure the material into the mold. I used a 3 part mix made out of 50% Part A dragon skin 10NV, 49.8% Part B dragon skin and 2% Slo-jo to accelerate curing. To avoid bubbles, the mix had to be pressurized using a vacuum. Then, the mix had to be poured carefully and slowly into the miniature mold in three intervals. After each interval the mold had to return to the vacuum in order to avoid bubble formation. At the end, the mold had to be overflown with some extra material and a square piece of plexi carefully positioned on top of the mold to assure a flat surface. Then the mold was placed on a heating bed for curing for about 15-20 minutes. The first molds I made, I unfortunately miscalculated the percentages of the mix and added 20% of slo-jo instead of 2%, this made the mix basically impossible to ever cure. To clean the miniature molds, I had to use a high-pressure water cleaner. I then returned to molding and proceeded to a second mix. This time the result was correct.
prototyping
To accelerate prototyping, I went looking for small commercially available balloons and for either 8mm, 10mm or 12mm plastic straws. Finding the balloons was not difficult, but large straws are not easily available in the Boston area (no time for online purchase). With these elements in the lab I studied form close the Arthrobots joint designs and tried to duplicate it using my materials. I started by cutting out a diamond shape measuring 2cm x 2cm in order to allow 90% foldability. Then I added a plastic “tendon” to allow the articulation to increase from 90 degree to 180 degrees and then to return back to 90 degrees. After I had to find ways to install a commercial balloon in the articulation. The balloon had to be inflated and deflated using FlowIO. For this I added 0.4mm soft silicone tubing and inserted it inside the articulation. FlowIO indeed inflated the balloon, but some problems needed to be solved for optimal actuation. The shape of the round commercial balloons used did not seem to work, on top of this gluing them to the straw was not viable, as the balloon came off during the inflation/deflation process. Also, the way I installed the tendon rendered the articulation rigid.
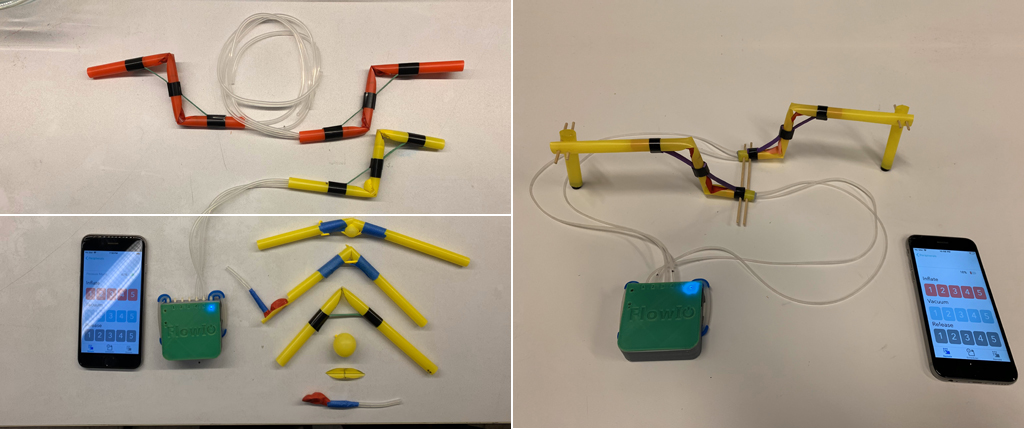
Ali had placed an order of tubular balloons. I inflated and deflated them a couple of times to pre-stretch the material, cut them 7cm long, I then attached the balloon to silicone tubbing, inserted the balloon inside of the straw and instead of gluing the balloons to the straw I used in each side of the articulation a small piece of thermal heat plastic to hold the balloon in place without interfering with inflation/deflation. I also pre-stretched the elastic tendons and created a double fold to make them stronger but without losing elasticity. Then I proceeded to try again actuation with FlowIO. This time the actuation was good. I then added a second joint folding to the opposite direction and installed two balloons with tubing and tendons. When I tried actuation with FlowIO, the second articulation folding towards the inside resisted actuation. I observed that tubing thickness was affecting foldability and decided to use thinner tubing. After this trial, double actuation was working.
I then assembled a second leg and attached both legs by perforating two small holes and passing through two small pieces of wood. We then connected FlowIO to the tubing and experimented inflating and deflating all 4 balloons at different rhythms to try to make the prototype walk. We observed that it would be beneficial to add a 90 degree articulation to anchor the folding legs to the ground. Even if we did not successfully make the prototype walk, it is clear that with further research, maybe with a little bit more powerful pumps and with a closer analysis of movement dynamics and inflation-deflation choreography, it would be possible to make the prototype walk.
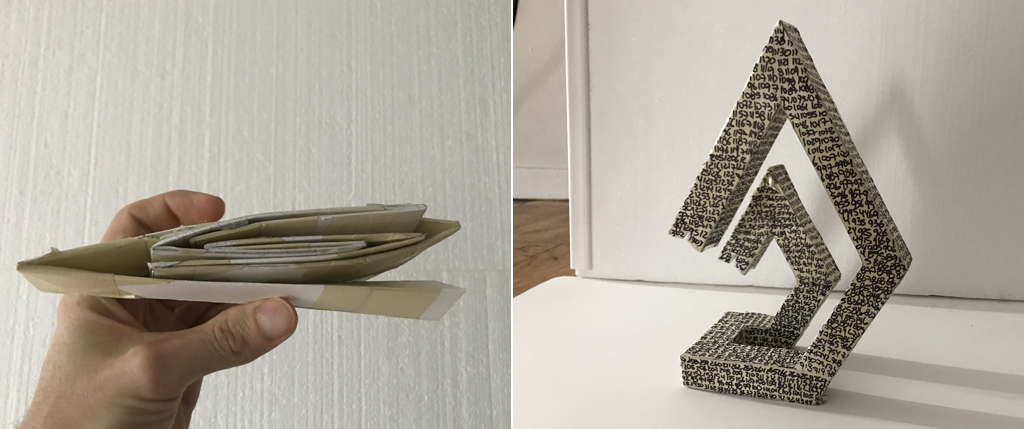
I was personally intrigued by the project and I would like to one day dig deeper into it, specially to deploy 2 dimensional surfaces into three-dimensional shapes. And in particular a project I developed during a Deployable Surfaces class last I took with Chuck Hoberman.