Hello_world programs for t44 and nrf24L01 radios from Rob Hart, Fall 2019.
I have used an existing library for AVR and nrf24l01 to make two single-file programs: one for rx and and one for tx using the tiny44. These files use a 'bit-bang' SPI method, so that the program does not depend on there being a hardware SPI capability on the chip. I put everything needed for each program in its own file, in order to make the code consistent with other "hello-worlds". This is probably not the best practice, and makes it harder to reuse code, but perhaps makes it more readable and makes each file smaller.
Progress as of 11/13/19- The starting library, from Kerhribar.
- My files, translated to include common features with "hello-worlds" from HTMAA.
- These files work withNeil's t44 board. About 1500 bytes program memory.
{kind=link}
How the radio transmission works:
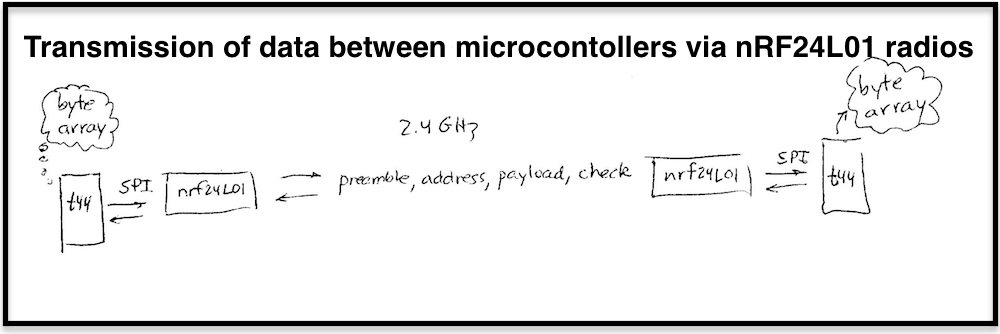
The tiny44 on the left originates a byte array (1-32 bytes can be sent in one packet.) It communicates with the nRF24L01 radio via SPI to initialize and set up the radio for transmission, then sends its byte array. The radio sends out its packet, which consists of:
- A preamble.
- A transmission address. This address must match the "receive" address on the receiving radio. Note that the addresses identify the packets, not the particular devices. For that reason, the "rx" and "tx" addresses are interchanged on the two devices, so that they can talk to one another.
- The data packet.
- A set of bytes that the receiver uses to check the integrity of the received packet.
The receiver sends back an acknowledgment when it has successfully received a packet.
Most of this is done automatically. All that the microcontroller program needs to do is to set up the transaction, and send and receive bytes.
See the datasheet for details. These devices are not that complicated, and the data sheet becomes somewhat comprehensible after a few minutes (hours?) gazing at it.
How I set up the radios:
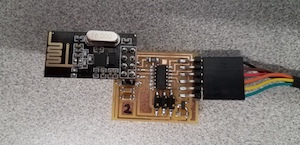
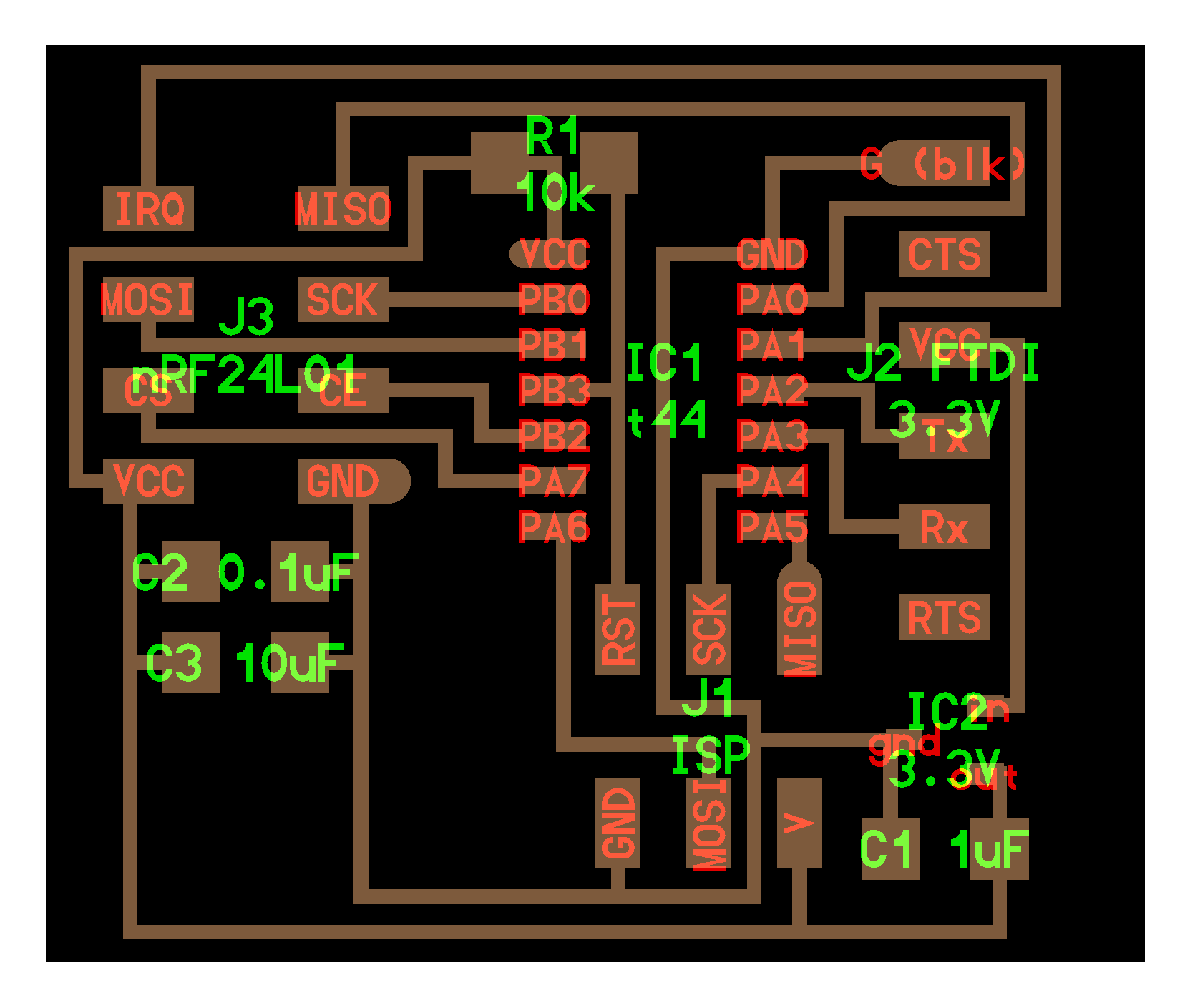
Here are the two devices that I used. The board on the left has the transmission program, which just sends out four bytes of data, with the fourth byte incremented on each transmission. The board on the right is programmed to receive, and is connected to an FTDI cable. (I used 3.3V - 5V should work, since inputs are '5V tolerant'.)
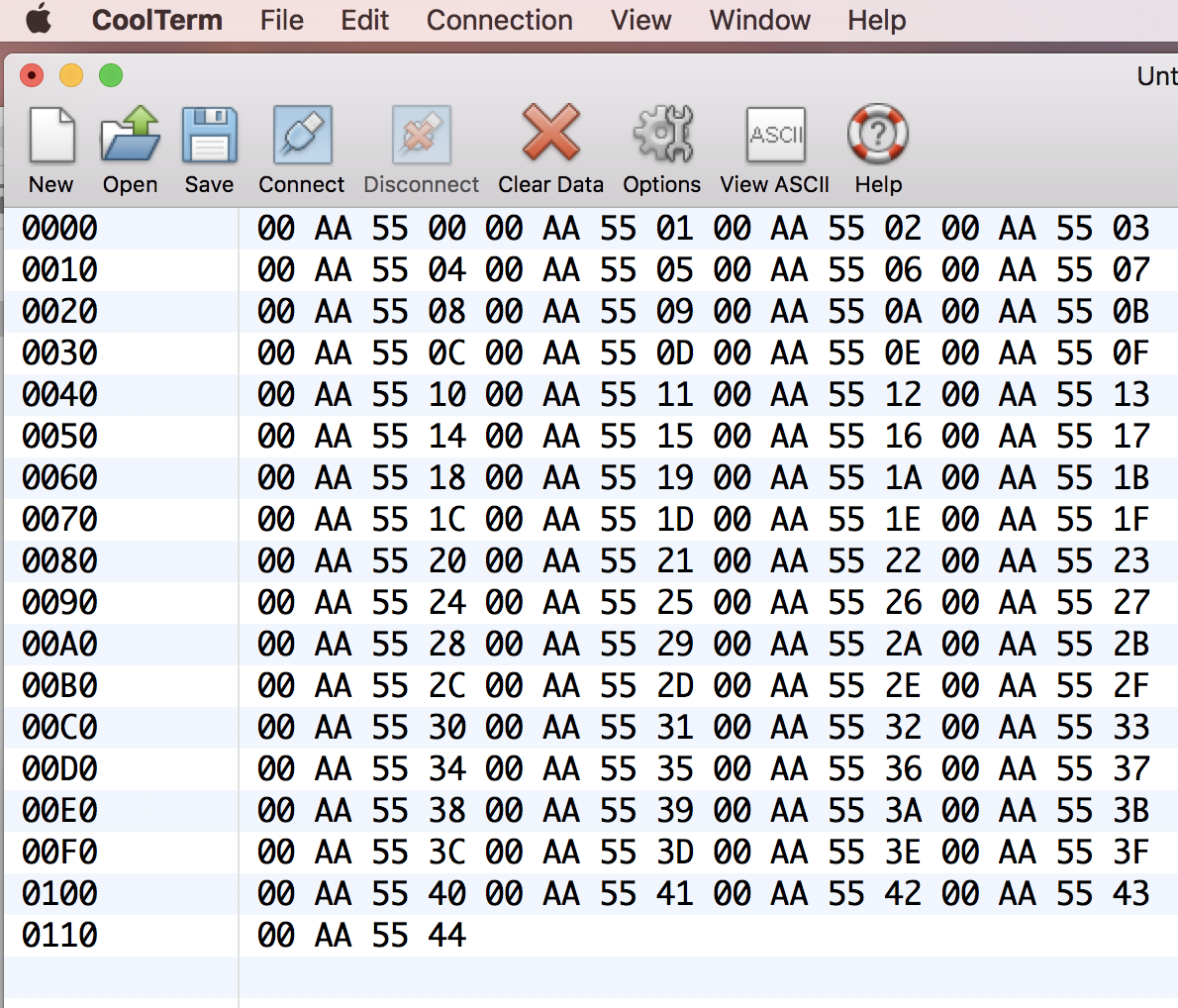
Above is the output (in hexadecimal) from the receiving t44. Three bytes stay the same, the fourth is incremented.
This example does not really 'do' anything, but the possibilities are endless, once you can send bytes back and forth between two microcontrollers. In this case one radio transmits and the other receives. It would be simple to set them up to alternate between sending and receiving. You would just need to add the appropriate functions for receving to the "tx" file and vice versa.
More things to do.
- See if there is any efficiency to be gained from consolidating and generalizing the functions that read and write to the device.
- Consider spending quality time with data sheet and writing code bottom up, starting withNeil's SPI code.
- Compare to NRF24 library for Arduino.
- Look into use for audio transmission. How fast can these things send data?
- Set up a network. These radios can receive from several nodes.