Speech to Reality : Making Words Reality
Speech to Text to Mesh to Voxel to Toolpath to Assembly to Reality
Project Description
Speech-to-text-to-mesh-to-voxel-to-toolpath-robotic assembly
The ability to turn spoken words into physical objects could represent a significant shift in how we interact with the material world. In this framework, spoken words are more than just expressions of thought; words have the power to create and change reality.
Imagine saying 'I want a chair', and you get a chair in less than 5 minutes. The ease of using speech as an input makes this technology highly accessible, even to those without technical expertise in 3D modeling or fabrication. It democratizes the process of design and manufacturing, allowing more people to customize and create objects according to their needs or preferences. By producing items on demand and reusing voxel modules, we can reduce waste associated with mass production and inventory storage.
This project is in collabroation with Se Hwan Jeon. Special thanks to Neil Gren, Miana Smith and Center for Bits and Atoms for the lab space and the material. I am grateful for the opportunity to work with them.
The ability to turn spoken words into physical objects could represent a significant shift in how we interact with the material world. In this framework, spoken words are more than just expressions of thought; words have the power to create and change reality.
Imagine saying 'I want a chair', and you get a chair in less than 5 minutes. The ease of using speech as an input makes this technology highly accessible, even to those without technical expertise in 3D modeling or fabrication. It democratizes the process of design and manufacturing, allowing more people to customize and create objects according to their needs or preferences. By producing items on demand and reusing voxel modules, we can reduce waste associated with mass production and inventory storage.
This project is in collabroation with Se Hwan Jeon. Special thanks to Neil Gren, Miana Smith and Center for Bits and Atoms for the lab space and the material. I am grateful for the opportunity to work with them.
Leaning the Robot With Miana
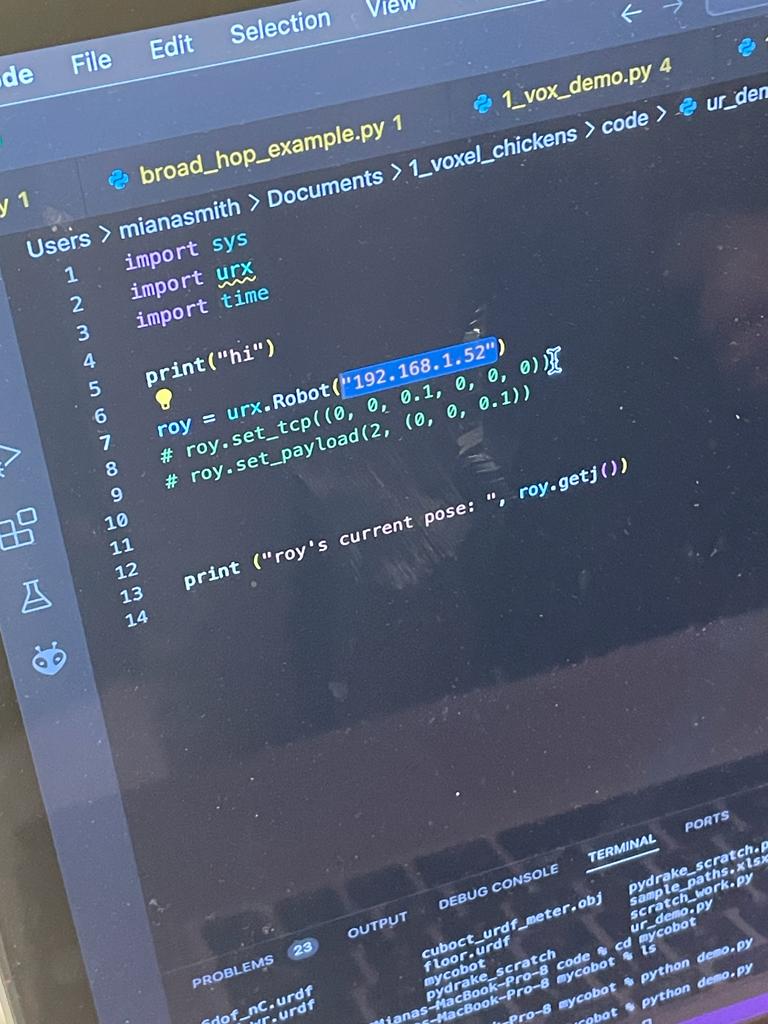 Robot IP address
Robot IP address
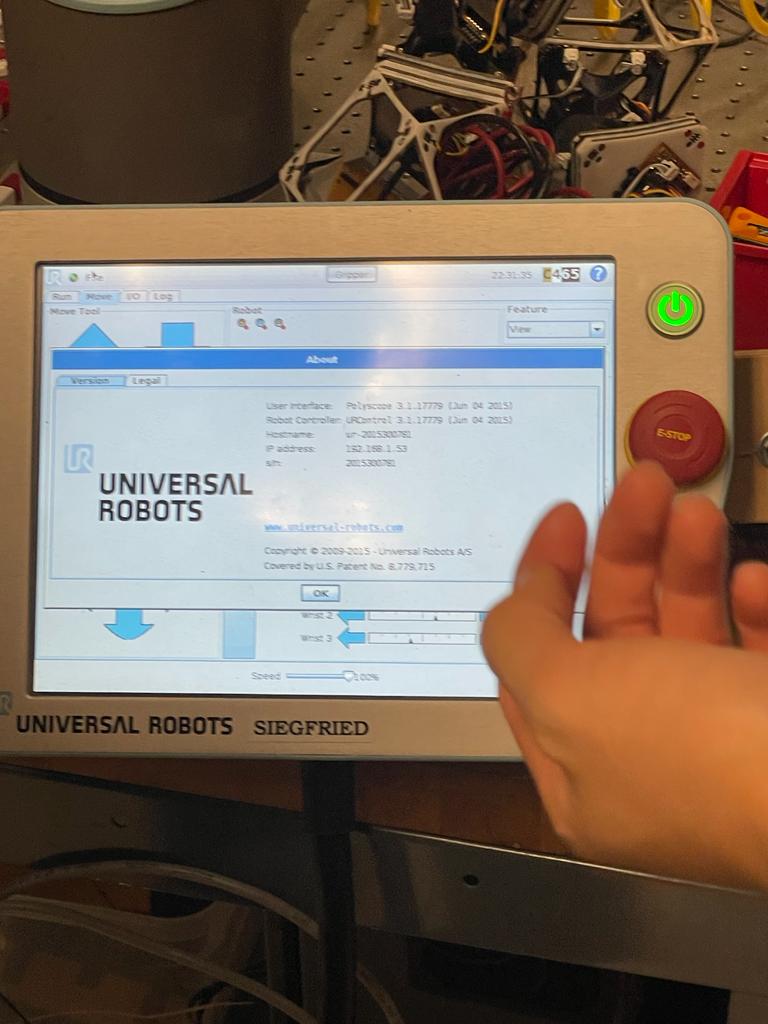 Controll Menu
Controll Menu
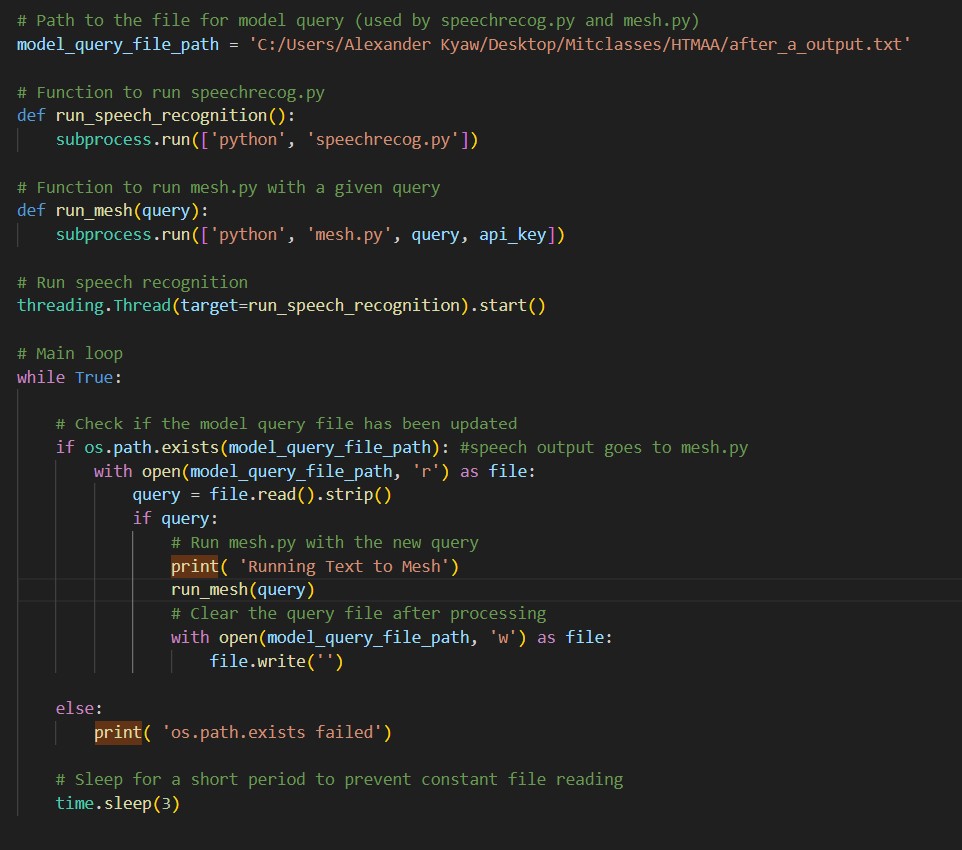
Speech to Text - Accessing Microphone and Speech Detection
 Code
Code
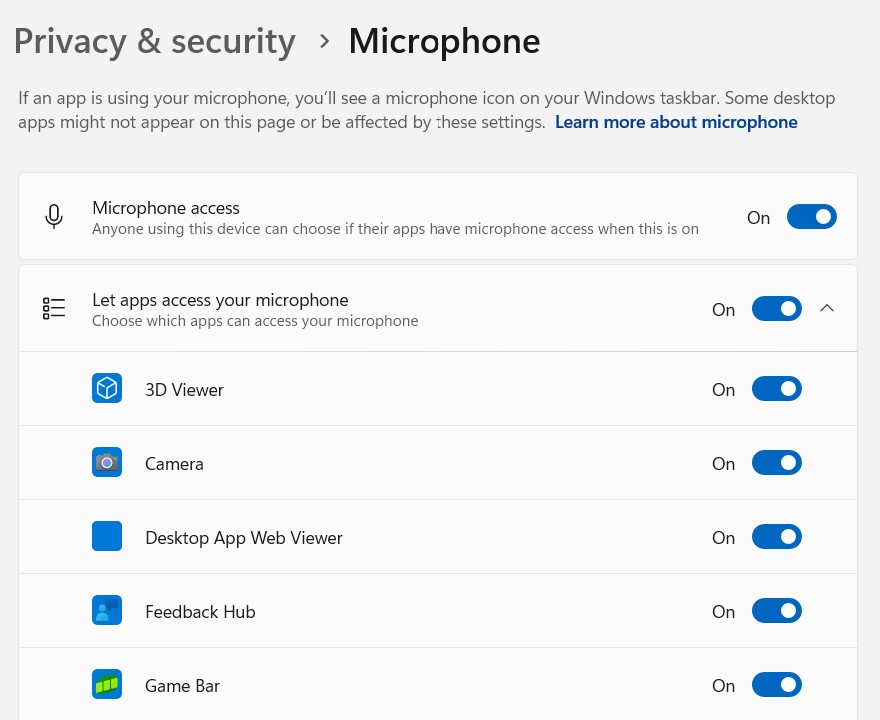 Make sure microphone is enadbled
Make sure microphone is enadbled
 txt file as storgage
txt file as storgage
 User interface and error management
User interface and error management
Text to Mesh - Command Line Interface / app.py
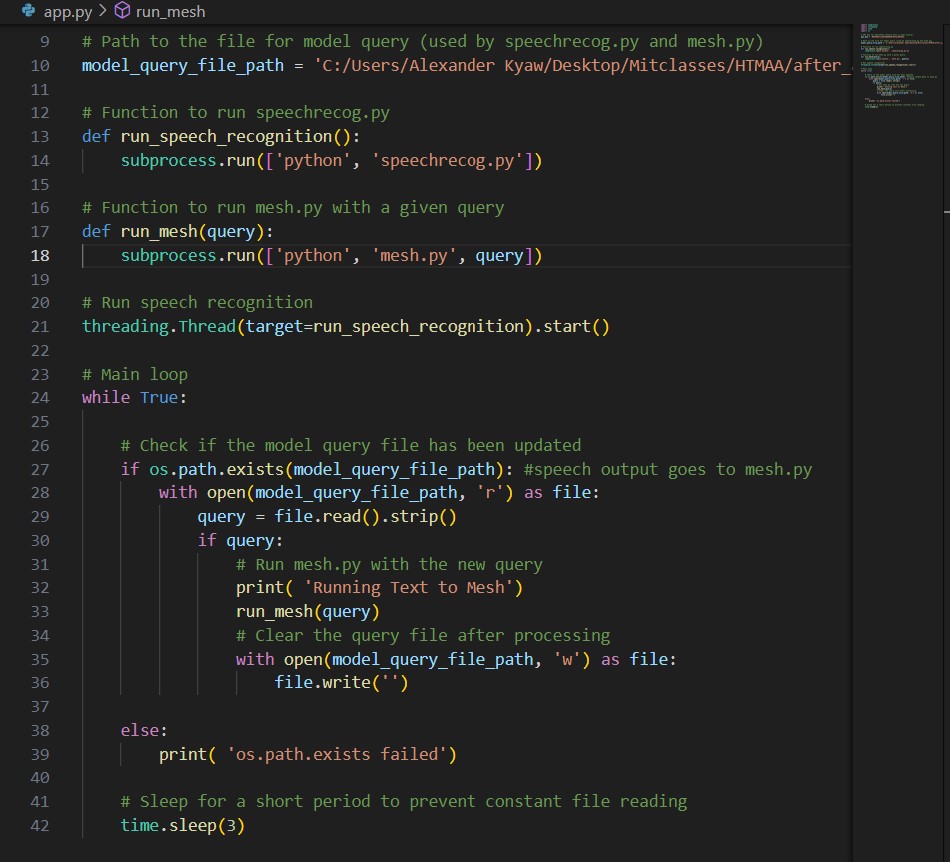 Command line interface
Command line interface
 Generate voxels based on the size and location.
Generate voxels based on the size and location.
.
. Code for the Speech recogntion .
Voxelization - Informed Sorting / Assembly Sequence
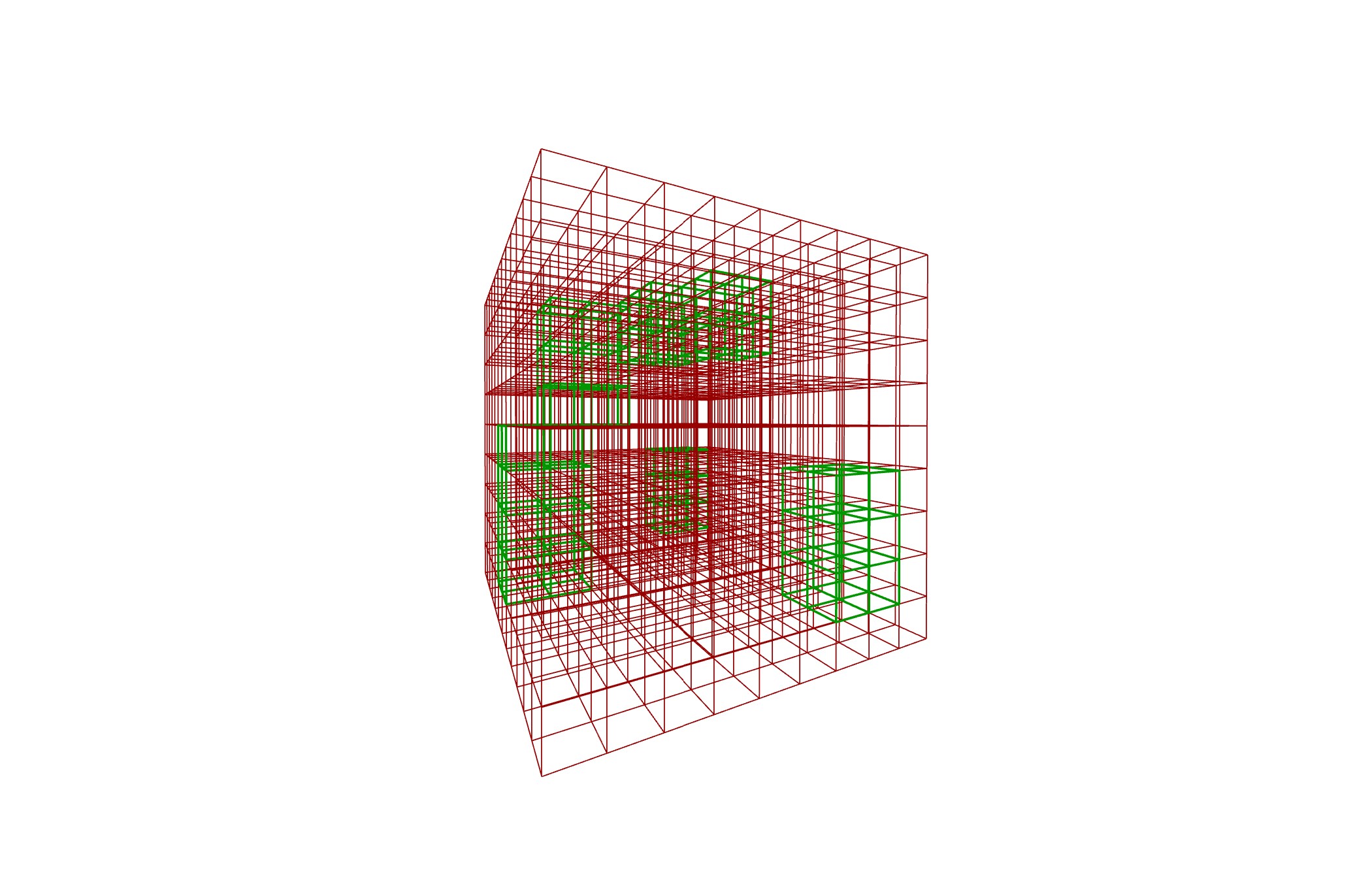 Sub division based on voxel dimensions
Sub division based on voxel dimensions
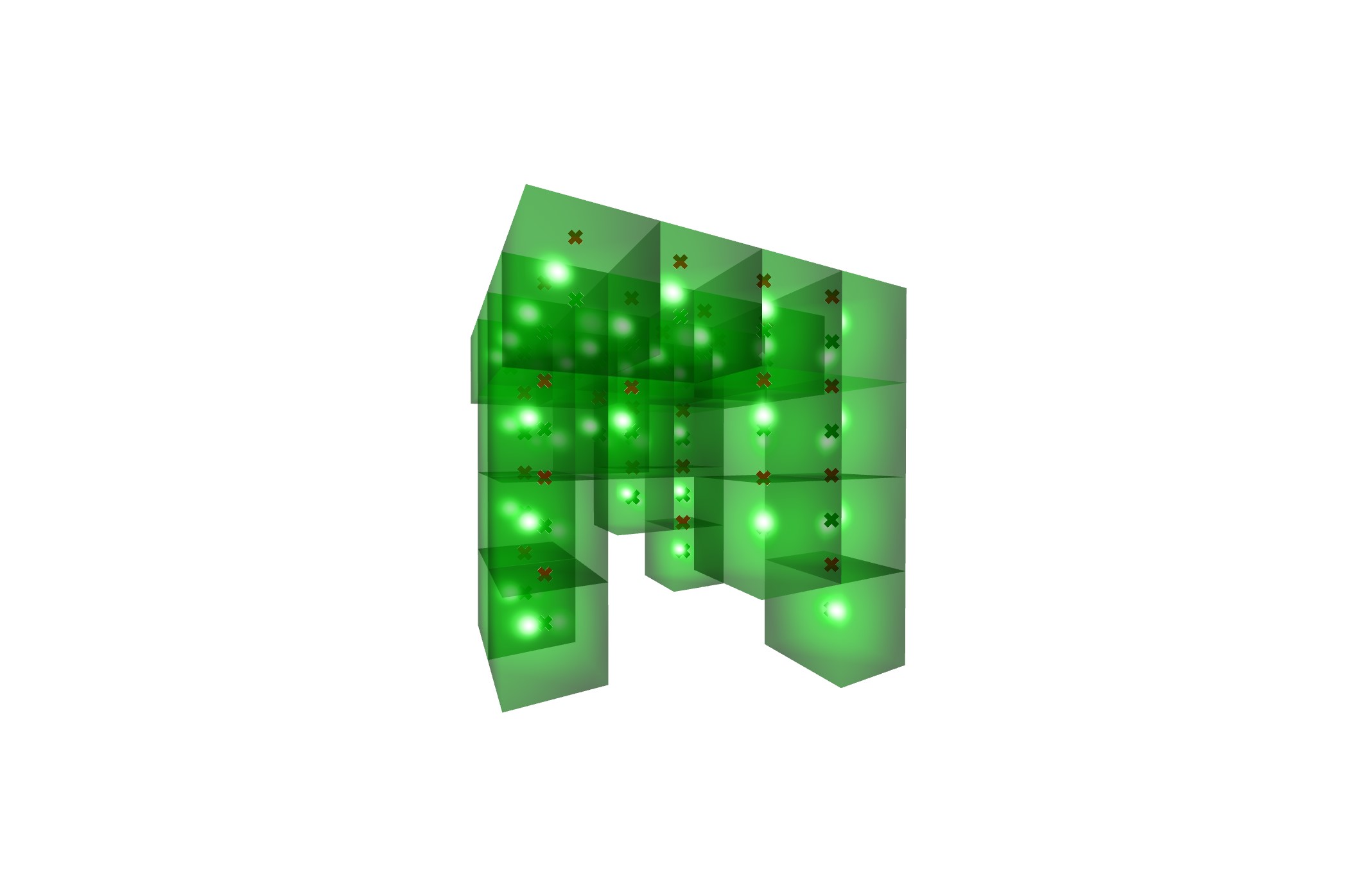
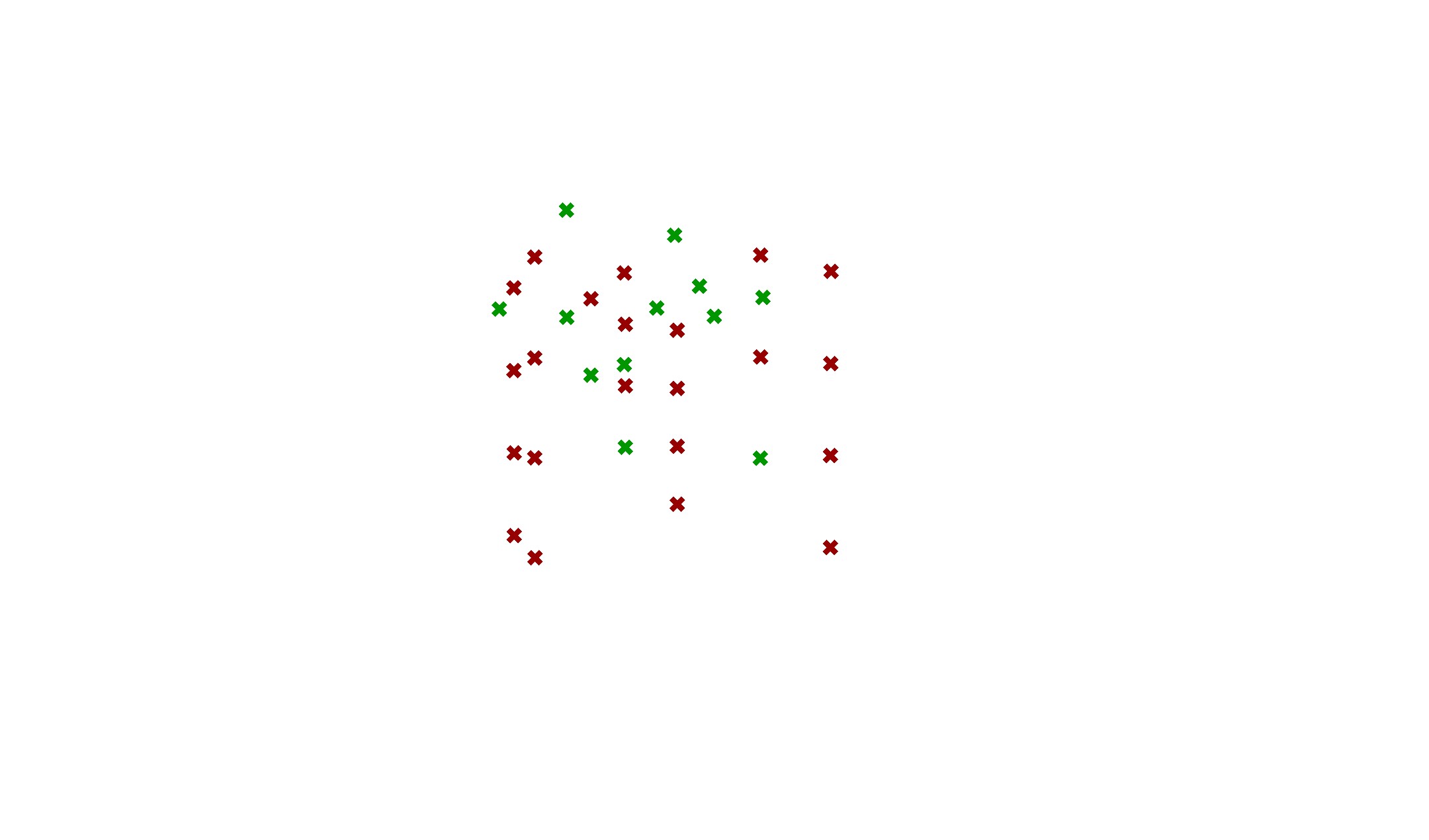 Red = cantilever -> assembled last
Red = cantilever -> assembled last
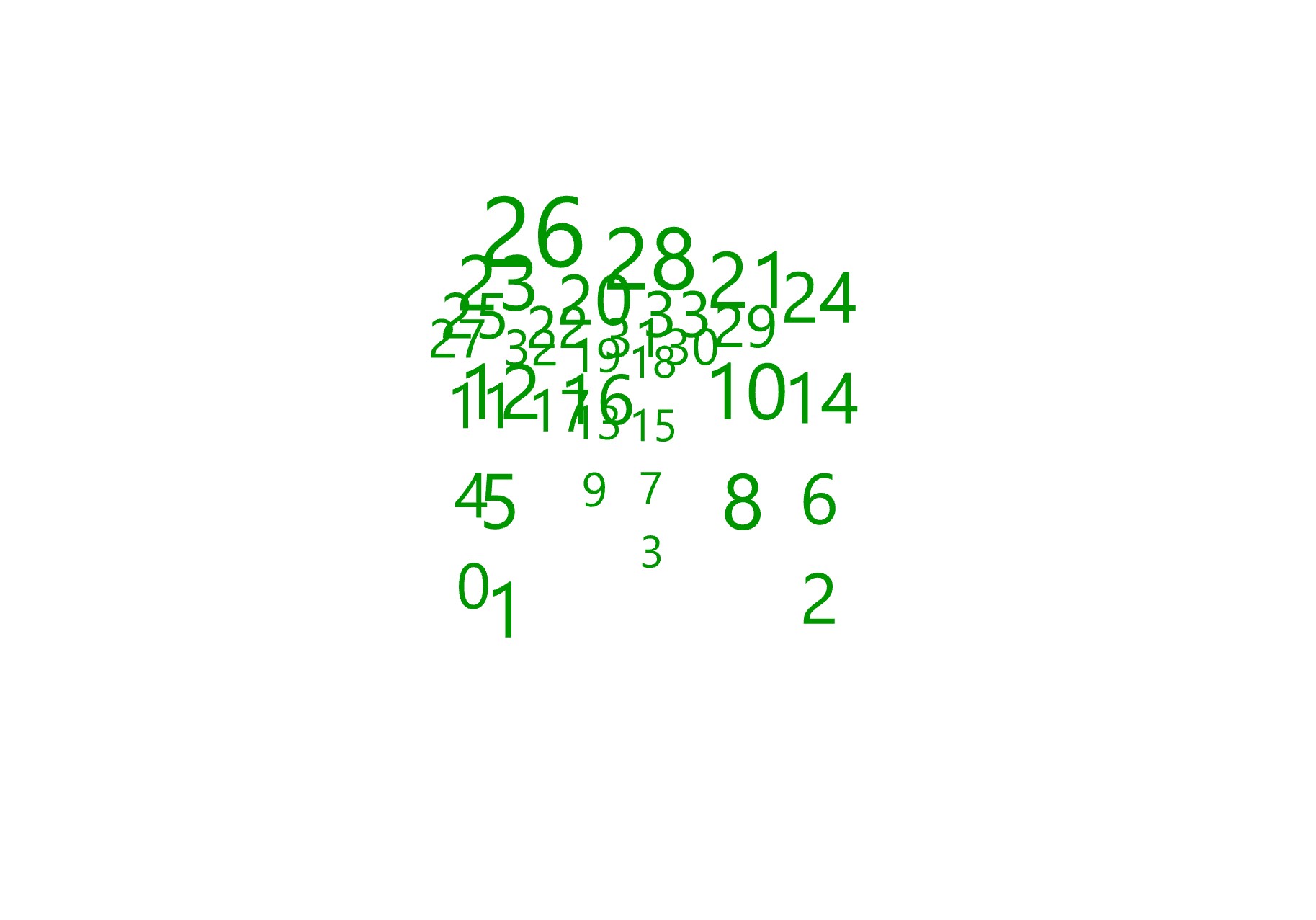 Labeled based on assembly order
Labeled based on assembly order
End Effector Mesurement
 Measurments are importort
Measurments are importort
 end effector measurement. Using m6 nut
end effector measurement. Using m6 nut
 .Use digital capilers
.Use digital capilers
 .Or a ruler
.Or a ruler
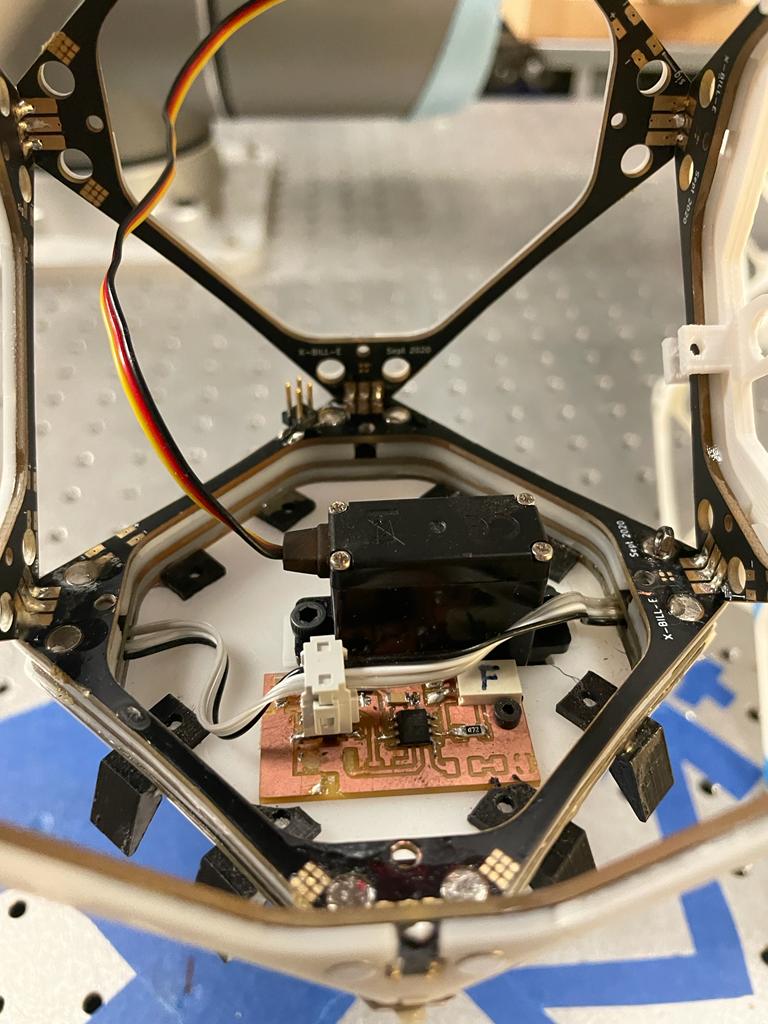
End Effector Fabrication
 3D printing
3D printing
 Connection to robot plate
Connection to robot plate
 Connection to electronics
Connection to electronics
 Attached
Attached
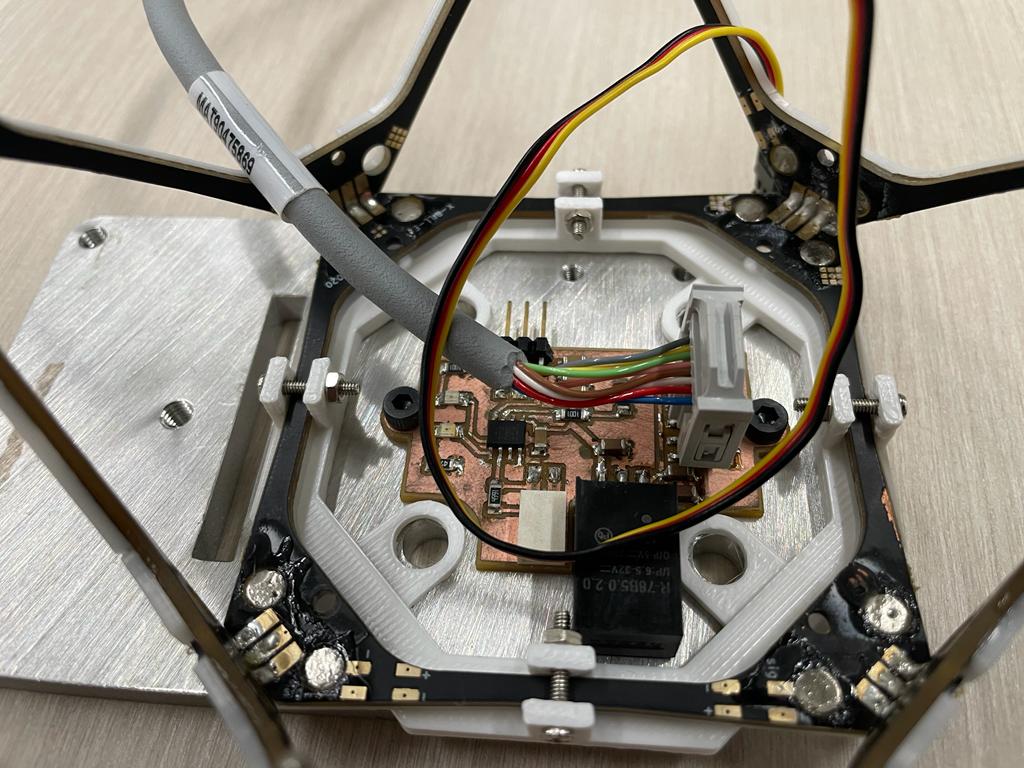
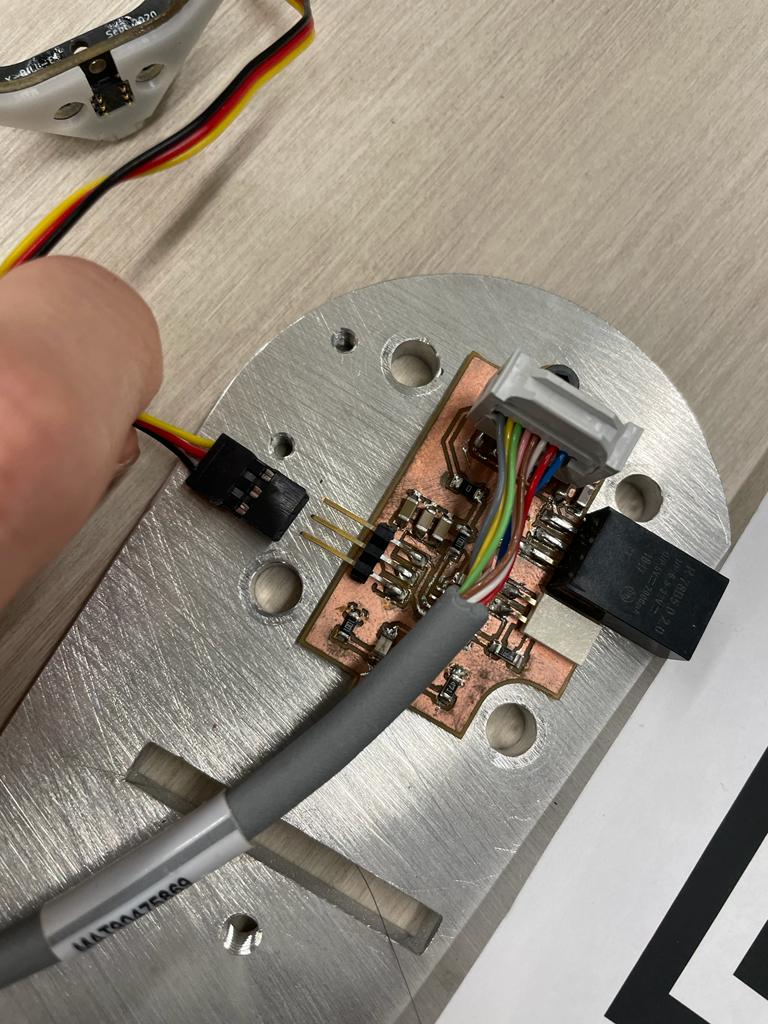
End Effector Connection
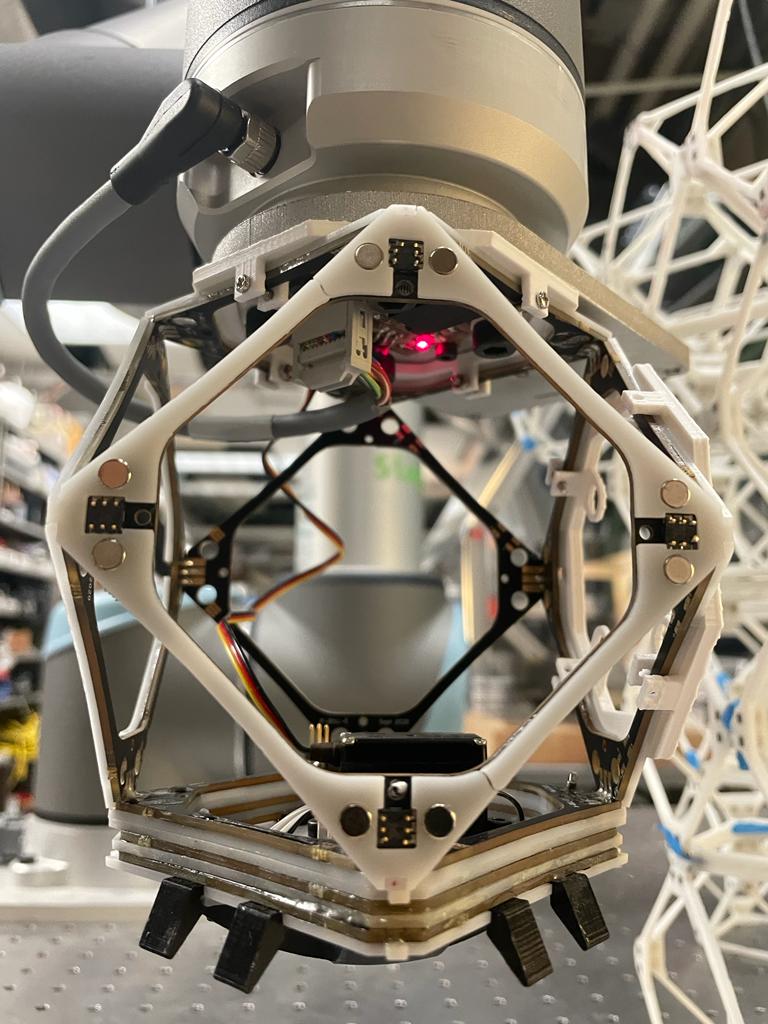 .
.
Assembly - Finding Origin
.
Assembly Full Documentation
.
Assembly Test
.
Assembly
More on robots at Se Hwan's site https://fab.cba.mit.edu/classes/863.23/Architecture/people/Se/assignments/week_14.html
Conveyor Belt
Making a Conveyor Belt for the Voxels
CAD Design
 Nuts and bolts design - help from simon
Nuts and bolts design - help from simon
 Nuts and bolts design
Nuts and bolts design
Laser Cutting from CAD
 Testing
Testing
 Laser file
Laser file
 Actual Cutting
Actual Cutting
 .
.
3D Printed Connections
 Testing tolerance
Testing tolerance
 .
.
Assembly of 3D printed parts, manufactured parts, and laser cut pieces
 .
.
 .
.
 .
.
 .
.
PCB Milling in KiCAD
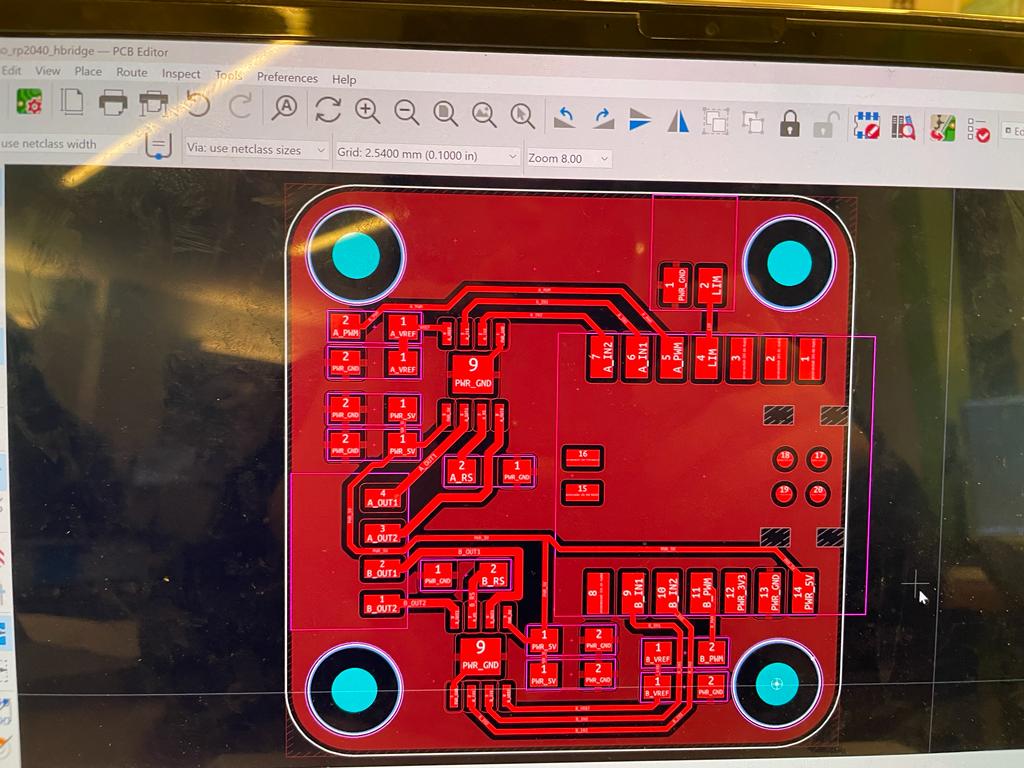 KiCad Design - help from Quentin
KiCad Design - help from Quentin
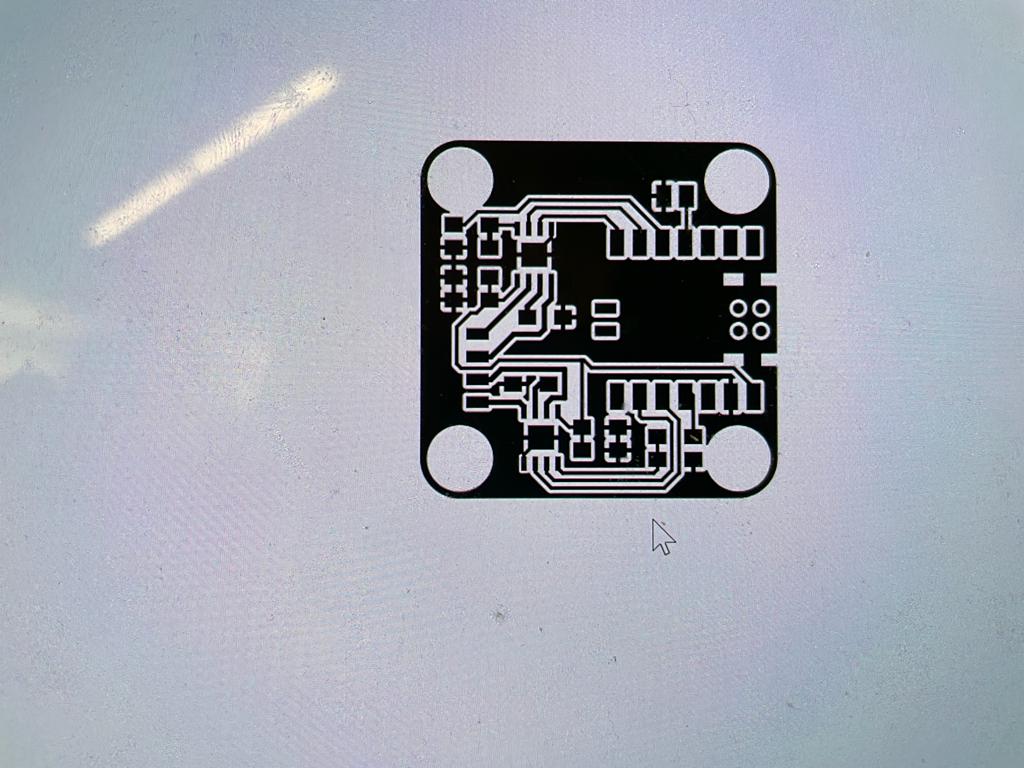 SVG output
SVG output
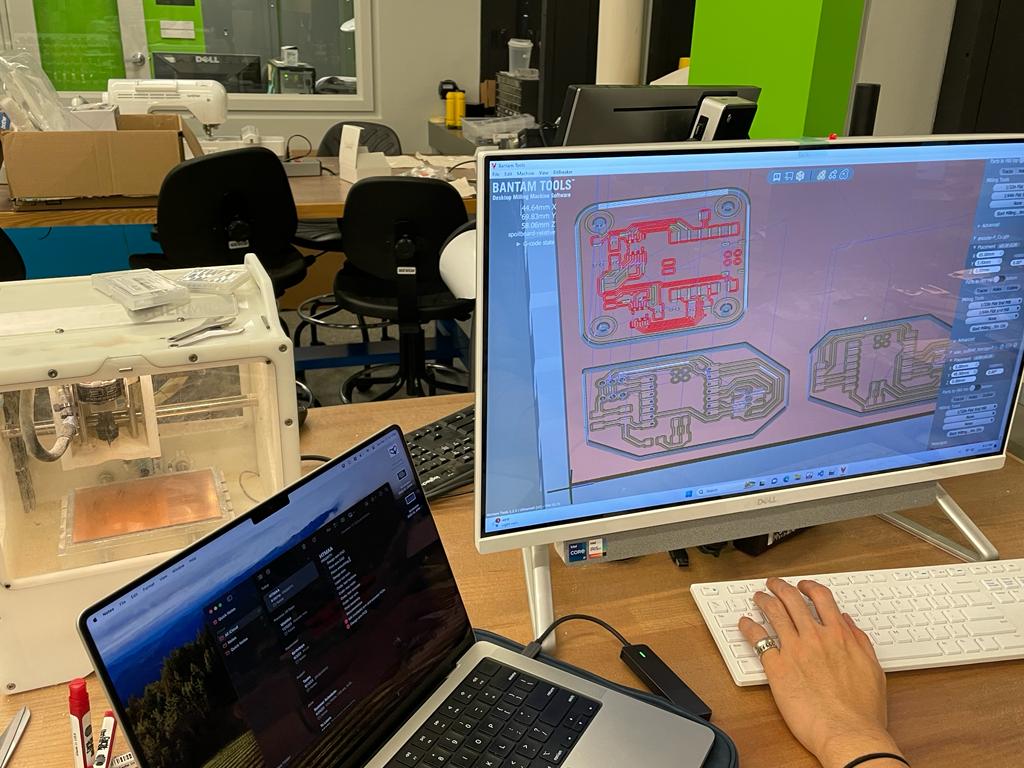 PCB Toolpath
PCB Toolpath
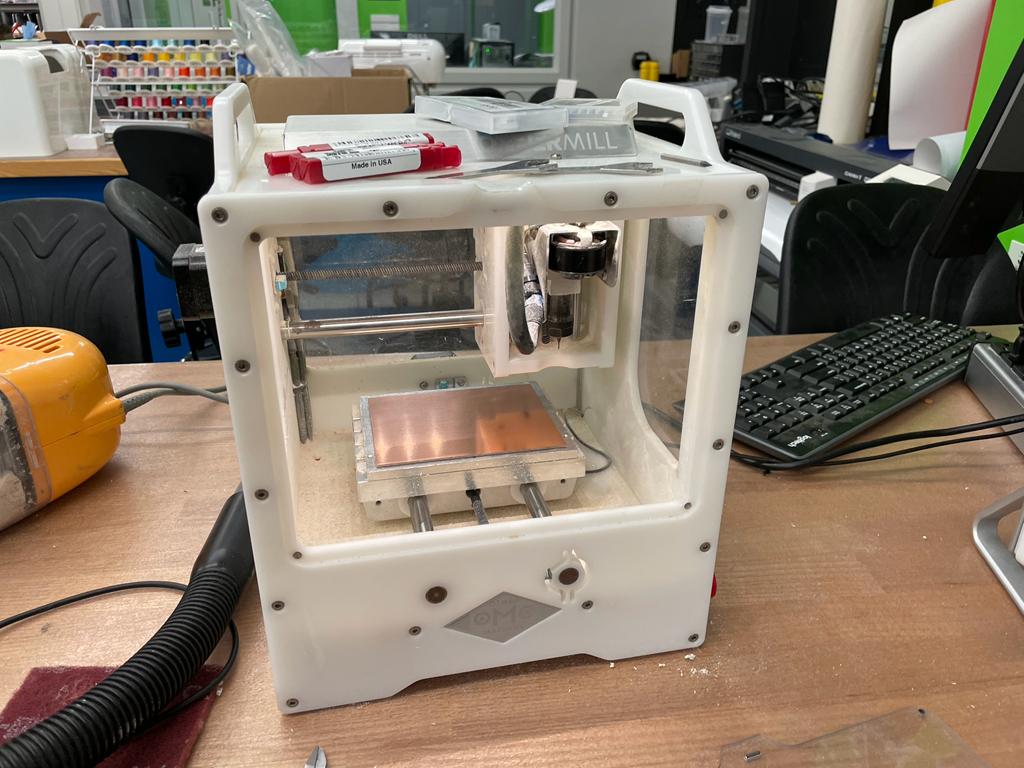 Actual milling
Actual milling
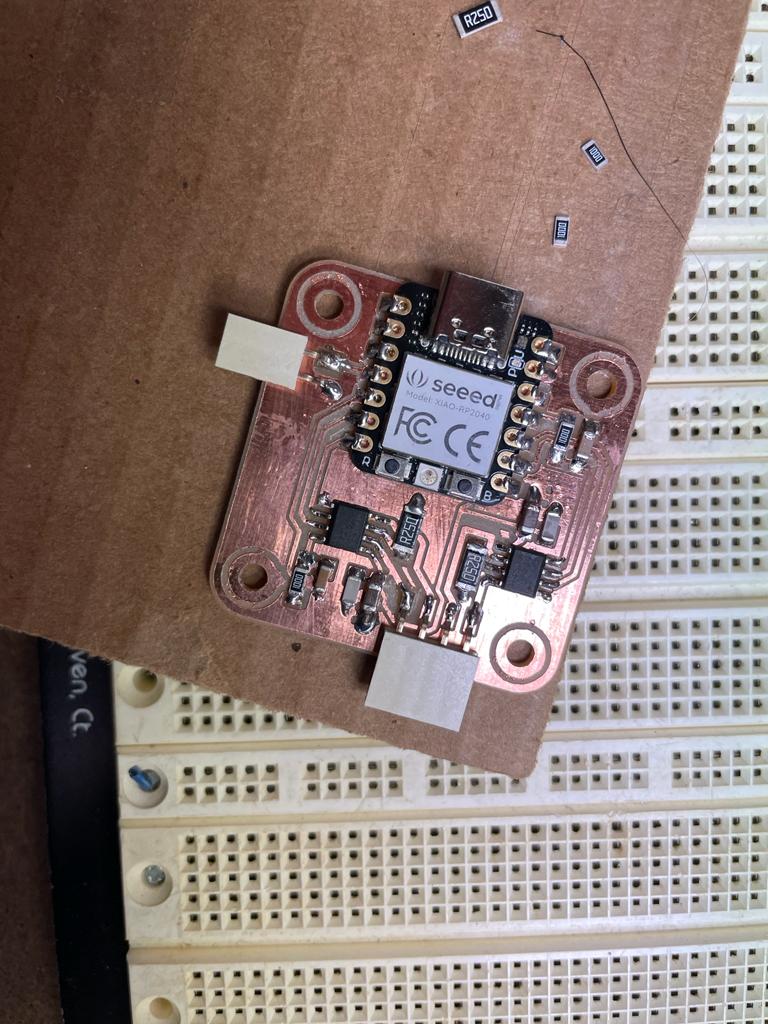
PCB Soldering
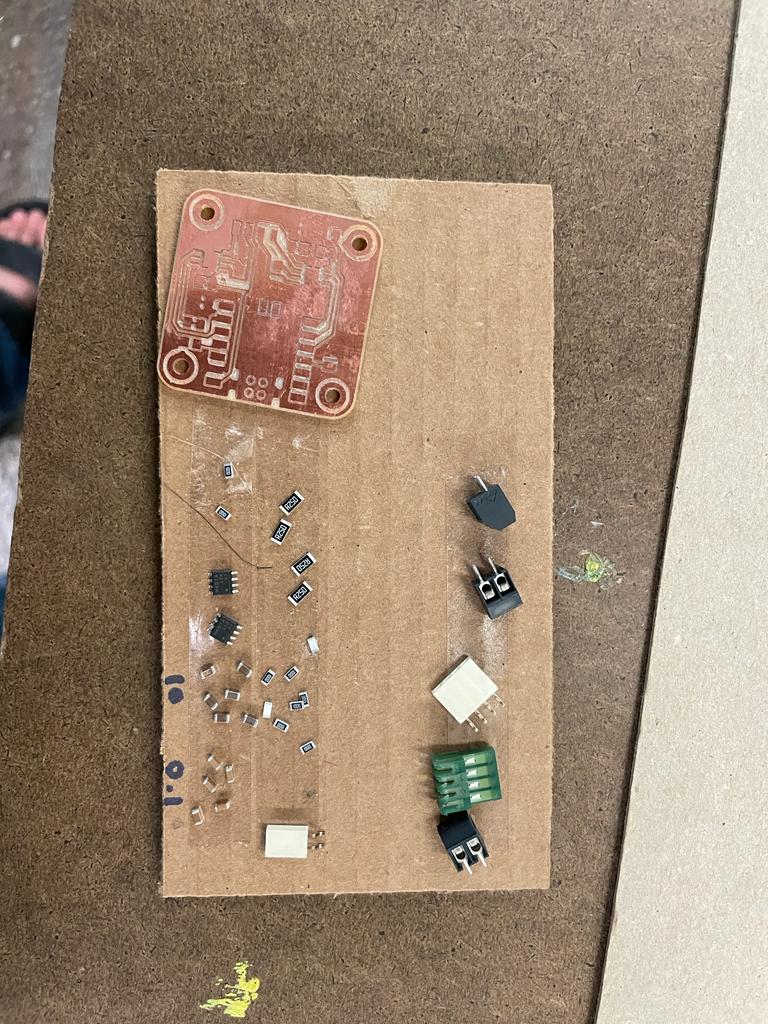 All the parts
All the parts
 .
.
Testing !
 .
.
 .
.
Coding in Micropython
This is similar to the code fromn machine week
import machine
import time
def init():
global i_m
val_A, val_B = lookup_AB[i_m]
pin_A1.value(val_A)
pin_A2.value(not val_A)
pin_B1.value(val_B)
pin_B2.value(not val_B)
def move(steps, dt_ms=2):
global i_m
n_steps = abs(steps)
direction = steps >= 0
delta = 1 if direction else -1
for i in range(n_steps):
i_m = (i_m+delta) % 4
val_A, val_B = lookup_AB[i_m]
pin_A1.value(val_A)
pin_A2.value(not val_A)
pin_B1.value(val_B)
pin_B2.value(not val_B)
time.sleep_ms(dt_ms)
pin_A1 = machine.Pin(6, machine.Pin.OUT)
pin_A2 = machine.Pin(7, machine.Pin.OUT)
pin_B1 = machine.Pin(28, machine.Pin.OUT)
pin_B2 = machine.Pin(4, machine.Pin.OUT)
pin_A_pwm = machine.Pin(27, machine.Pin.OUT)
pin_B_pwm = machine.Pin(29, machine.Pin.OUT)
# duty 0-65535
pwm_A = machine.PWM(pin_A_pwm, freq=5000000, duty_u16=19660)
pwm_B = machine.PWM(pin_B_pwm, freq=5000000, duty_u16=19660)
lookup_AB = [
[1, 0],
[1, 1],
[0, 1],
[0, 0]
]
i_m = 0
Test Conveyor Machine
Voxels + conveyor belt
Mechanism Design
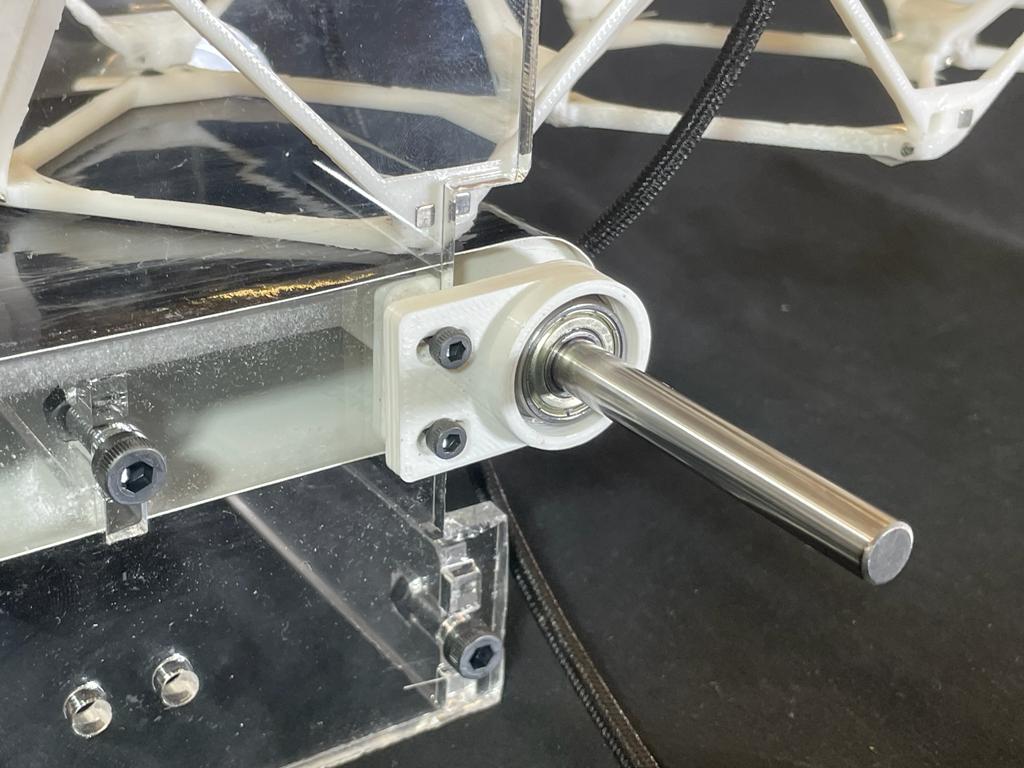 Liner Shaft Ball Bearing
Liner Shaft Ball Bearing
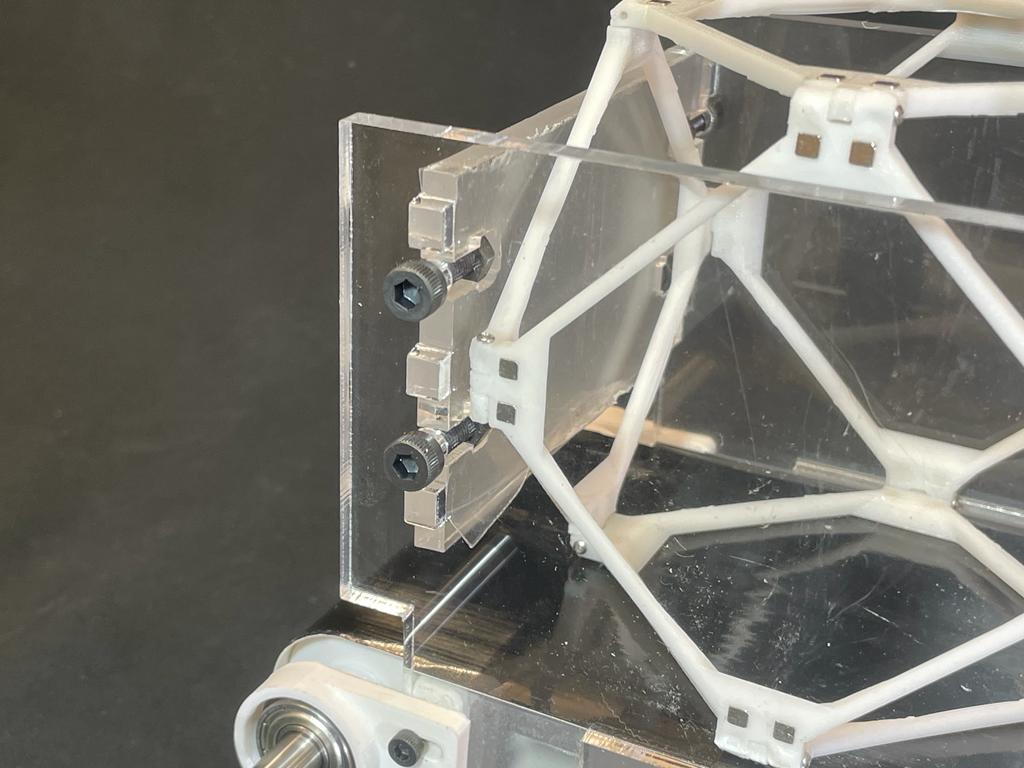 Voxel Container
Voxel Container
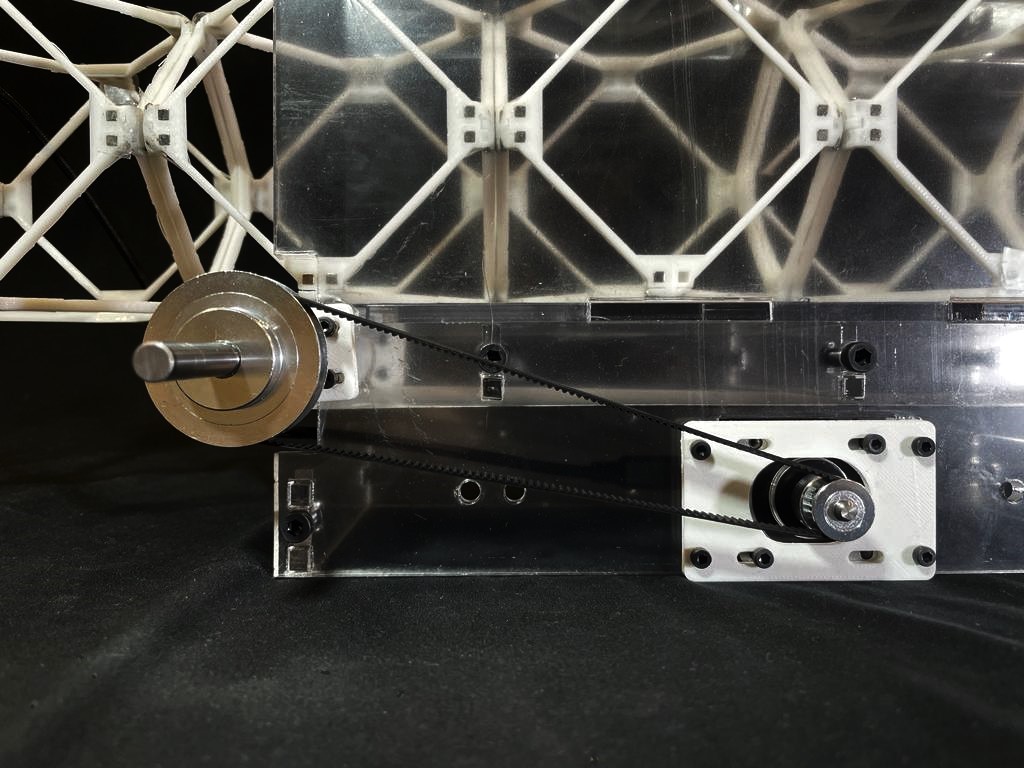 Pulley system
Pulley system
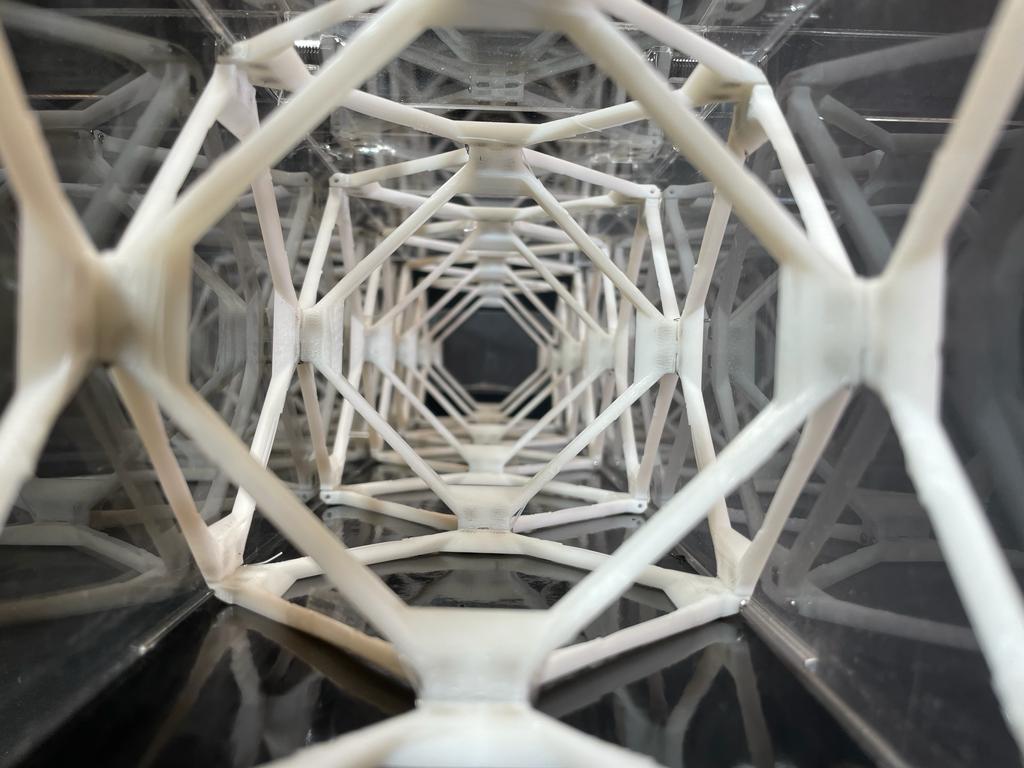 Voxels in Container
Voxels in Container
System Integration - Resetting the X-Y-Z of the voxel source coordinates
Conveyor belt is mounted. All coordinates have to be set to fit this location
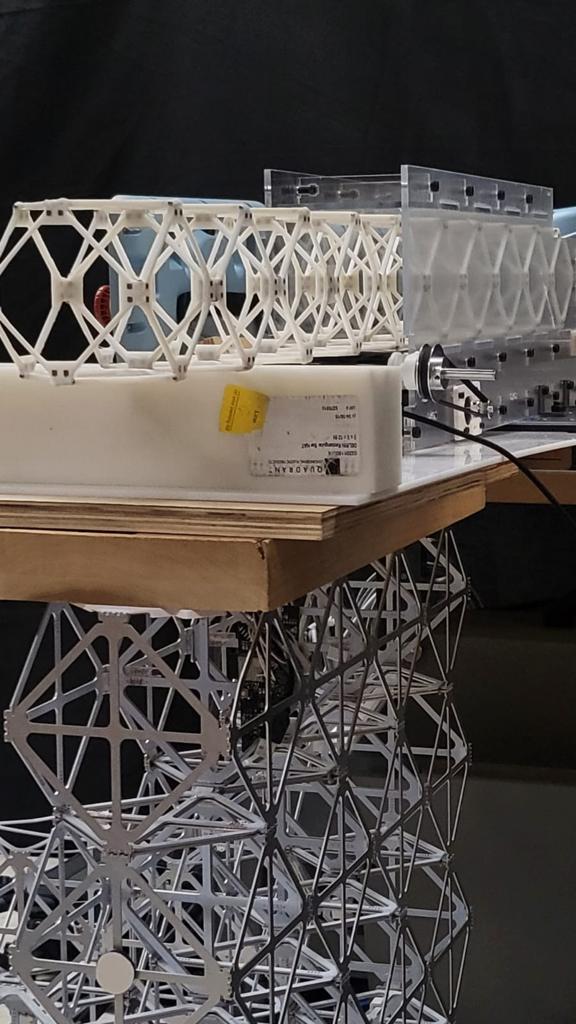 Using the voxel as a stand for even more voxels !
Using the voxel as a stand for even more voxels !
 Using the voxel as a stand for even more voxels !
Using the voxel as a stand for even more voxels !
Updated Python Code for Robot Manipulation
The code for robot + converyor belt
import urx
import time
import numpy as np
# Fixed parameters
PI = 3.1415926535
movement_plane_height = 0.4
source_coordinate = [0.08, 0.15, 0.042]
in_to_m = 0.0254
voxel_xy_offset = [-0.03, -0.15, -0.035]
# Load in xyz coordinates of voxels, organized from bottom to top layer
voxel_coordinates = [
[6.0, 2, 4], [14, 14, 4], [2, 14, 4], [6.0, 2, 8.0], #0-5
[14, 14, 8.0], [2, 14, 8.0], [14, 10, 8.0], [14, 14, 12], [6.0, 2, 12], #6-11
[10, 2, 12], [2, 14, 12], [14, 10, 12],[2, 10, 12], [10, 6.0, 12], [6.0, 6.0, 12], #12-17
[2, 14, 16], [2, 10, 16], [10, 6.0, 16], [14, 10, 16], [6.0, 6.0, 16], [10, 2, 16], #18-23
[14, 14, 16], [6.0, 2, 16], [14, 2, 16], [2, 2, 16], #24-30
]
for i in range(len(voxel_coordinates)):
for xyz in range(3):
if xyz == 1:
voxel_coordinates[i][xyz] = -voxel_coordinates[i][xyz]
elif xyz == 2:
voxel_coordinates[i][xyz] -= 4
# scale:
voxel_coordinates[i][xyz] = voxel_coordinates[i][xyz] * in_to_m
# offset
voxel_coordinates[i][xyz] += voxel_xy_offset[xyz]
print(voxel_coordinates)
# Setup robot as needed
robot = urx.Robot("192.168.1.53")
robot.set_tcp((0, 0, 0.1, 0, 0, 0))
robot.set_payload(2, (0, 0, 0.1))
acc_cmd = 2 # acc. and vel. for all movements
vel_cmd = 2
time.sleep(0.2) # leave some time to robot to process the setup commands
# Helper functions for convenience
def deg2rad(deg):
rad = []
for i in range(len(deg)):
rad.append(deg[i] * PI / 180)
return rad
def translateEndEffectorGlobal(robot, p_des, p_root):
p_cmd = robot.getl()
for i in range(len(p_des)):
p_cmd[i] = p_des[i] + p_root[i]
p_cmd[3:6] = p_root[3:6]
print("Moving to global position: ", p_cmd)
robot.movel(p_cmd, acc=acc_cmd, vel=vel_cmd)
def translateEndEffectorZGlobal(robot, p_z, p_root):
p_cmd = robot.getl()
p_cmd[2] = p_z + p_root[2]
p_cmd[3:6] = p_root[3:6]
print("Moving to global Z position: ", p_cmd[2])
robot.movel(p_cmd, acc=acc_cmd, vel=vel_cmd)
def translateEndEffectorXYGlobal(robot, p_xy, p_root):
p_cmd = robot.getl()
for i in range(len(p_xy)):
p_cmd[i] = p_xy[i] + p_root[i]
p_cmd[3:6] = p_root[3:6]
print("Moving to global position: ", p_xy)
robot.movel(p_cmd, acc=acc_cmd, vel=vel_cmd)
def grabSourceBlock(robot, p_root):
source_coordinate_xy = source_coordinate[0:2]
source_coordinate_z = source_coordinate[2]
translateEndEffectorZGlobal(robot, movement_plane_height, p_root)
translateEndEffectorXYGlobal(robot, source_coordinate_xy, p_root)
translateEndEffectorZGlobal(robot, source_coordinate_z, p_root)
robot.send_program('set_tool_digital_out(0, False)')
time.sleep(0.1)
translateEndEffectorZGlobal(robot, movement_plane_height, p_root)
def placeSourceBlock(robot, p_des, p_root):
translateEndEffectorZGlobal(robot, movement_plane_height, p_root)
translateEndEffectorXYGlobal(robot, p_des[0:2], p_root)
translateEndEffectorZGlobal(robot, p_des[2], p_root)
robot.send_program('set_tool_digital_out(0, True)')
time.sleep(0.1)
translateEndEffectorZGlobal(robot, movement_plane_height, p_root)
if __name__ == '__main__':
# Startup procedure
print("Starting program...")
j_root = deg2rad([0, -90, 135, 225, -90, 45])
print("Robot root joint angles: ", j_root)
print("Moving to home...")
robot.movej(j_root, acc=acc_cmd, vel=vel_cmd)
robot.send_program('set_tool_digital_out(0, True)') # open tool as default
p_root = robot.getl() # global root position on startup
print("Robot global root position: ", p_root)
# Main code
for coord in voxel_coordinates:
grabSourceBlock(robot, p_root)
placeSourceBlock(robot, coord, p_root)
#translateEndEffectorZGlobal(robot, movement_plane_height, p_root)
#translateEndEffectorXYGlobal(robot, [0.08, 0.15], p_root)
#translateEndEffectorZGlobal(robot, 0.063, p_root)
# Shutdown procedure
input("Press enter to shutdown...")
print("Returning to root position and orientation...")
translateEndEffectorZGlobal(robot, movement_plane_height, p_root)
translateEndEffectorXYGlobal(robot, [0, 0], p_root)
robot.movej(j_root, acc=acc_cmd, vel=vel_cmd)
robot.send_program('set_tool_digital_out(0, True)') # open tool as default
print("Program finished.")
time.sleep(0.5)
robot.close()
Demo Day was successful
Clean Documentation