Class 3: Numerical Solutions of Ordinary Differential Equations
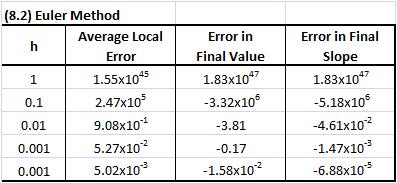
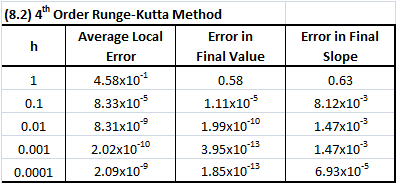
Problem (8.2): Euler & 4th Order RK solutions to SHM
Performance of both methods with varying step size:
Python source for Euler method
Python source for 4th order RK method
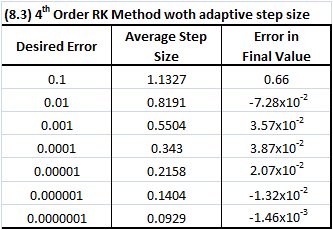
Problem (8.3): 4th order Runge-Kutta adaptive stepper
Chosen step size as desired local error varies:
Python source for 4th order Runge-Kutta adaptive stepper
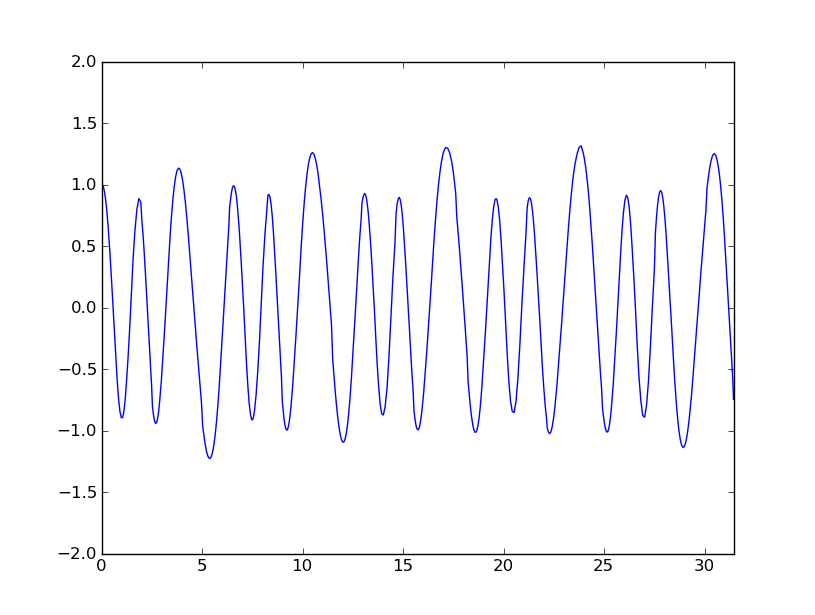
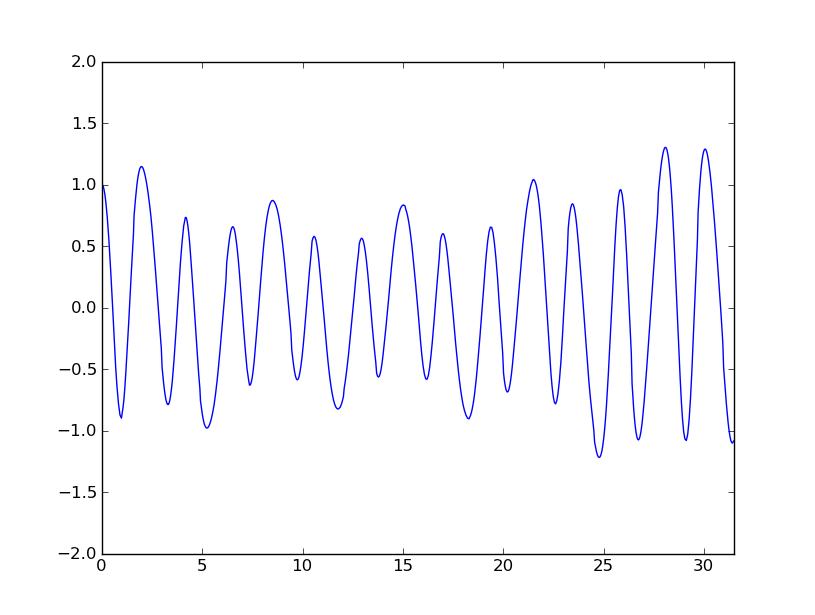
Problem (8.4): Numerical Solution for pendulum for periodic support motion
Solved with the RK adaptive stepper form the previous problem. Gravity = 10, length = 1, desired local error = 0.0001
Solution not animated. Consider animating it and posting a video
Solution with with amplitude = 6 and frequency = 2:
Solution with with amplitude = 6 and frequency = 1: