i
have recently been interested in the dynamics of the structure and the
robot as it builds the structure. this is a fairly unexplored topic.
most climbing robots consider their structure to be A) rigid, and B)
fixed.
For space construction, both (A)
and (B) aren't necessarily true. Most space structures are optimized for
mass, and therefore at large scale become flexible. Further, all space
structures are not necessarily fixed. They are technically floating in
microgravity, and their orientaiton, position, and direction of travel
is governed by spaceship controls (ie: propulsion).
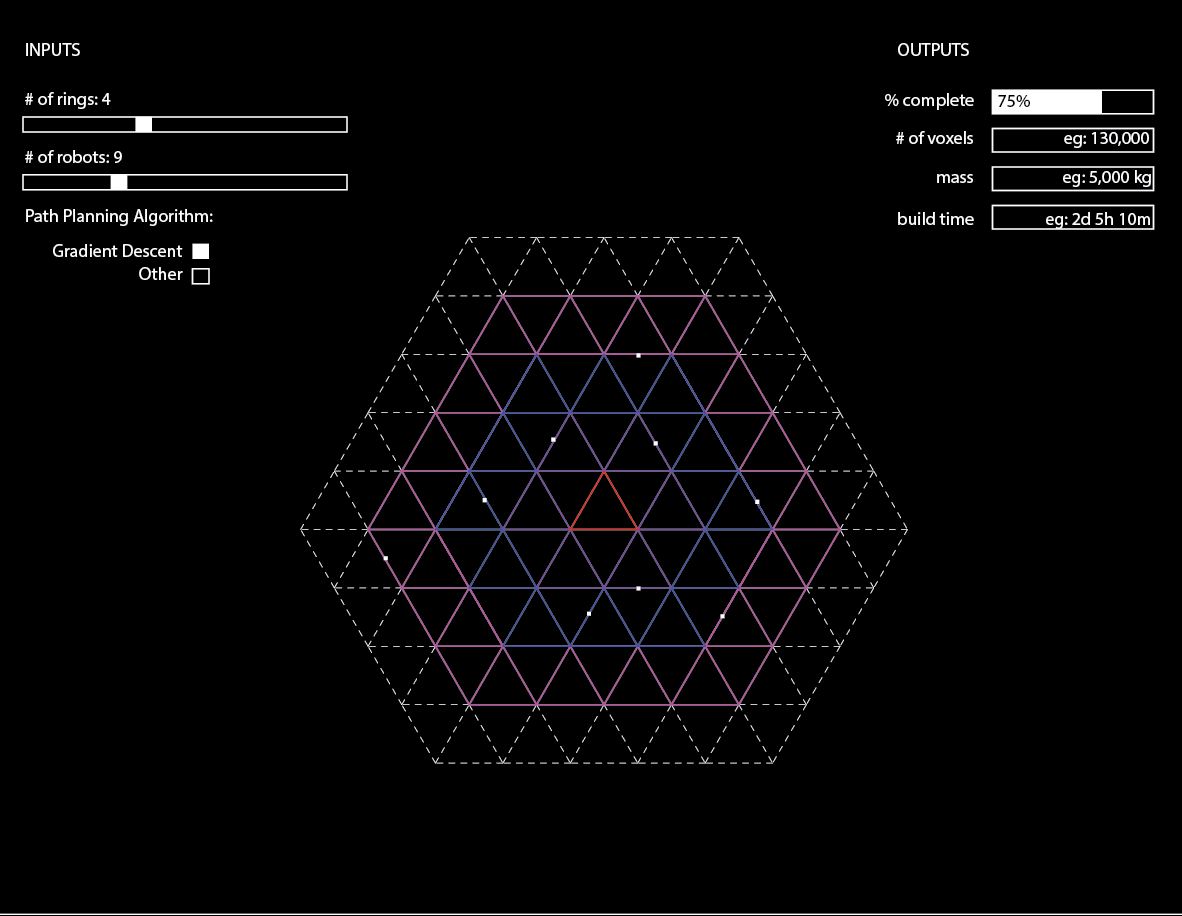
Therefore, a second topic would
look at these (comparatively) smaller scale interactions. While (A) is
indeed interesting, it will be more tractable to look at (B) and only
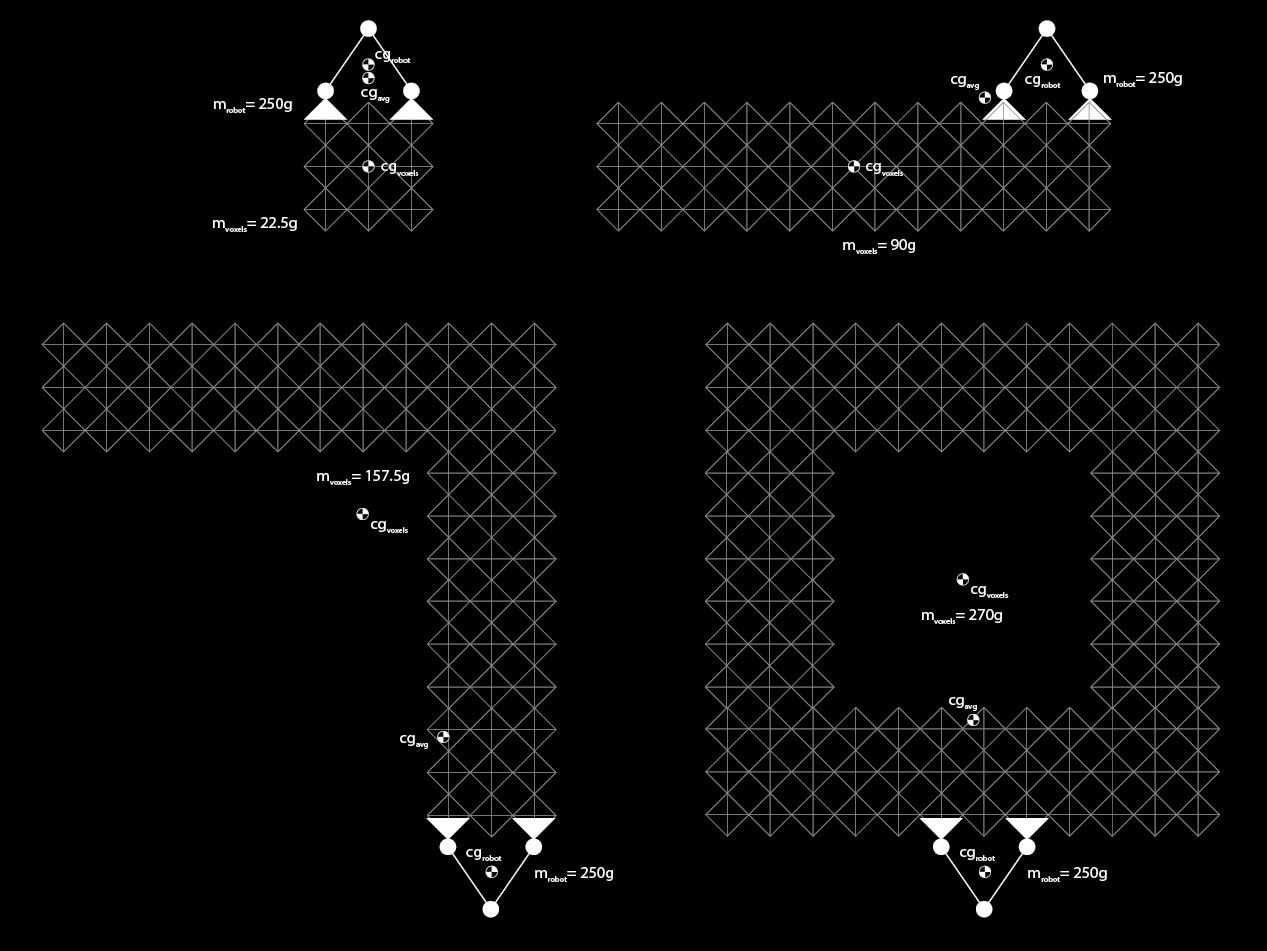
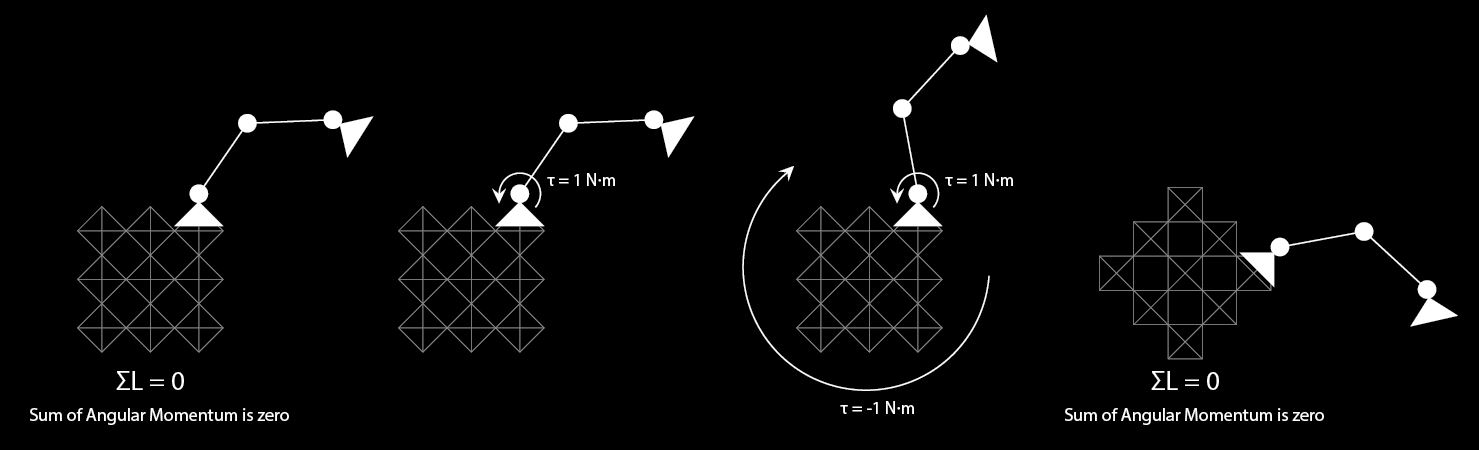
consider rigid body motions. The design tool/simulator would then
investigate how a robot with much greater mass than the structure it is
building would alter the center of gravity (CG) of the structure, and
how that would result in rotation of the structure in 2D (for now)
space.
Here's a sketch: