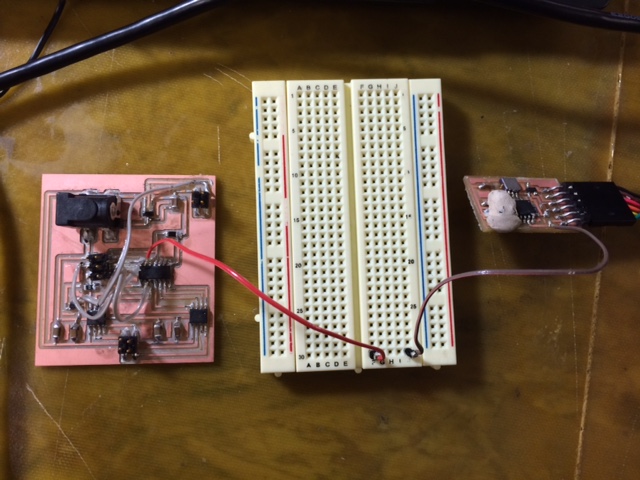
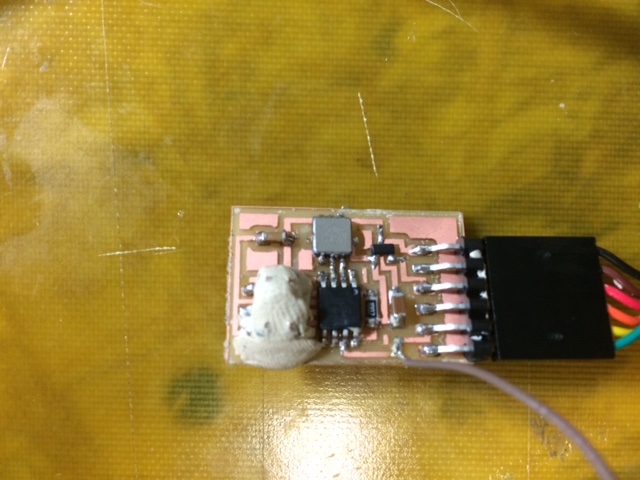
Given my multiple corexy idea from last week, I want to start playing with the limits of an end effector that would rotate the plate. A sensor that can help determine how much the plate has rotated would be an accelerometer. So this week, I wanted a stepper motor to rotate based on the output of an accelerometer.
This board was programmed using Neil's hello world 2 axis accelerometer code from H2MAA. Programmed in c, and I used Processing to read in the input. Board is powered by 5V from an FTDI cable.
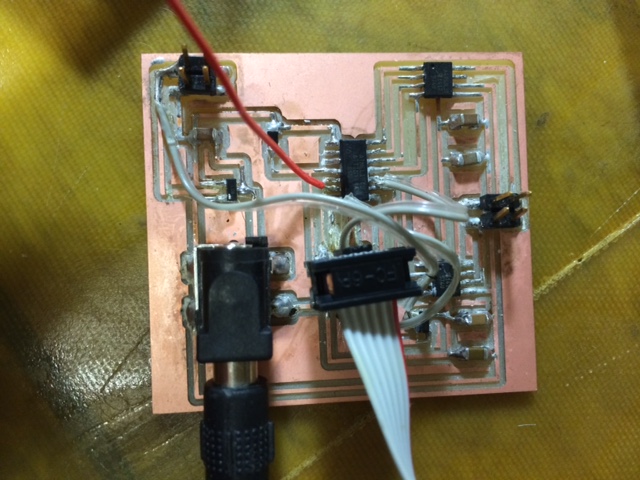
This controller controls the direction and number of steps of a motor. Lots of wires hanging out because I needed to re-mill, but couldn't get back into the machine shop haha. Requires 9-volt for the motor.
In my head, I can connect the output pin of the attiny45 on the accelerometer board to the input pin on the attiny44 board, and voila! Not as simple, however. Issues I ran into.
Suggestions for how to continue highly encouraged!