
This week we were to continue experimenting with measurement. I would call it a week of fails for me.
Pi Cam
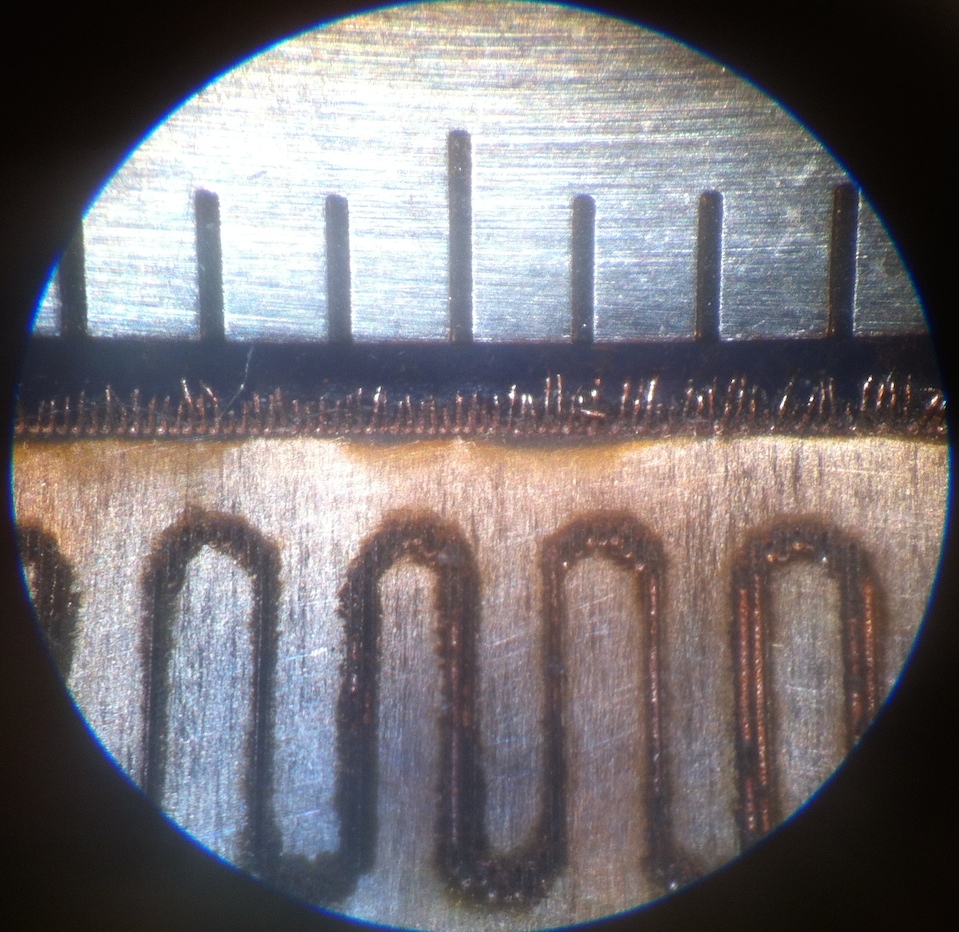
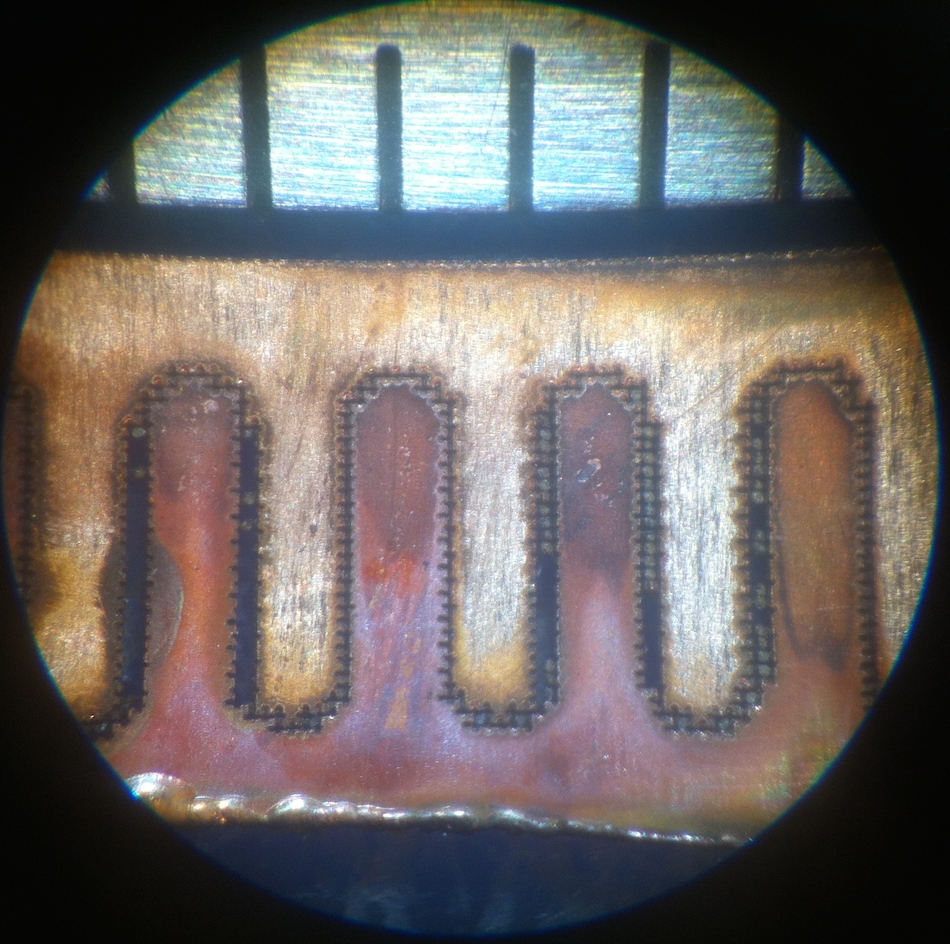
I experimented with moving all of the OpenCV from last week to my raspberry pi, using the dedicated raspberry pi camera module. It's a slick little package: $30 for an HD camera with a dedicated camera serial interface bus. It has a fixed focus, but based on this post, you can adjust the focus to do macro photography. Below, I shot an old tiny45 board that I had lying around.
The raspberry pi's documentation shows how to programmatically set exposure settings, capture stills and video to streams, and a bunch of other stuff. No simple way to process frames as they come in with OpenCV... need to muck around more. The naive approaches I tried were all pretty slow just to get frames off the camera.

Given this, I think I'm happy to just use USB webcams and microscopes for computer vision work.
TXRX for composites QC
I've been experimenting with resin transfer molding of thin-walled carbon fiber tubes using inflation bladders for compaction. Two of the challenges have been ensuring an even wall thickness and ensuring the braid is situated so it can press up against the outer mold. It's possible to get visual feedback on the latter due to the optical clarity of the outer tube mold, but sometimes the refraction makes it tricky. I thought I would see if capacitive sensing could shed more light on the situation inside the mold.
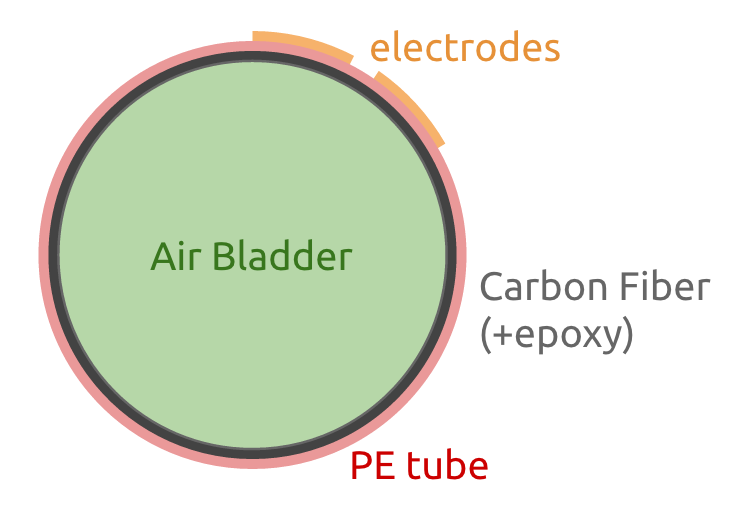
At first, I wanted a capacitive sensor that could tell me how thick the layup is. This seemed like a challenging task because the target thickness is so thin (around .010"), the pads are separated from the layup by a thicker layer of polyethylene (around .020"), and the carbon fiber itself is relatively conductive (having resistivity of a few micro-ohm-meters). These challenges seemed like they could be addressed by the geometry of the capacitive sensor.
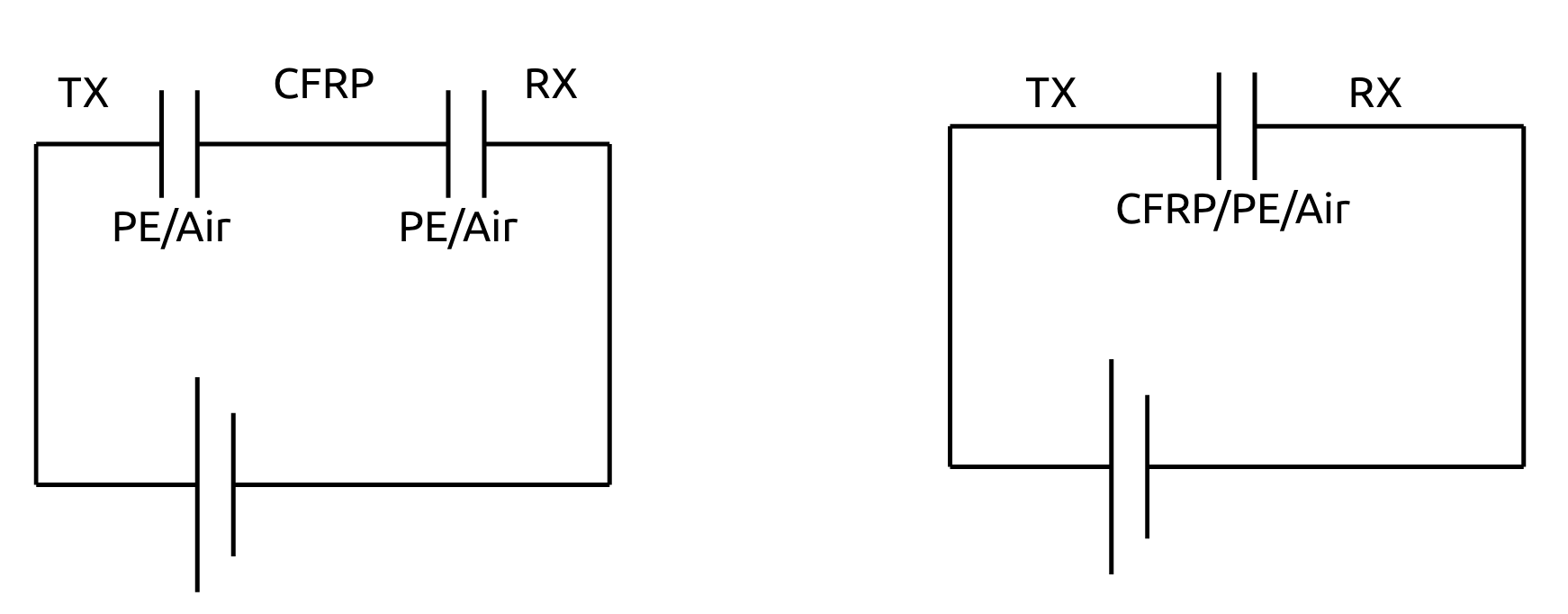
If we think of the sensor as effectively integrating the dialectric constant along a path, we can hope to adjust the integration path based on electrode geometry. Neil advised that the depth of penetration of the path is roughly proportional to the electrode size and the gap between them. To keep the path even more constrained to the surface, I designed lots of interleaved fingers.
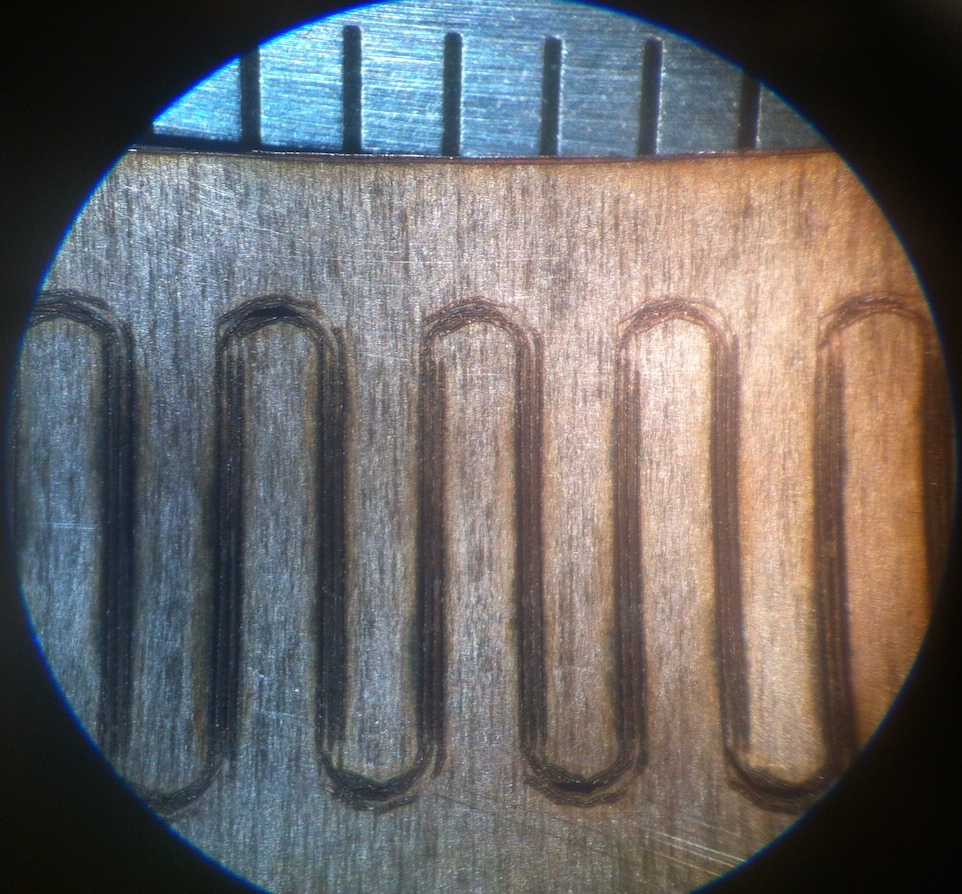
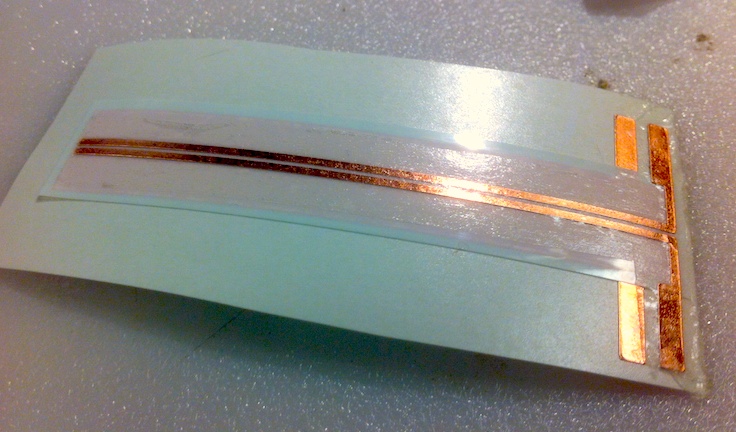
I acquired some pyralux (copper film bonded to a kapton substrate) that I've been meaning to experiment with -- I thought this could be the perfect time to use it. The complex geometry and small gaps between the electrodes would be a nightmare on the vinyl cutter. Above are the results of a couple trials to etch the copper film off the kapton using a fiber laser (1 micron wavelength vs. 10 micron CO2 laser wavelength). First, I tried a micromachining approach -- simply generating offsets to the desired geometry. This worked reasonably well, except where the laser power ramping failed to etch the material. Next, I tried a raster approach. The ramping was no longer an issue, but I was left with little strings of copper bridging the gap. Finally, I did a two-stage raster, once in each direction. This worked much better.
Despite the promising results, I ditched the pyralux in the interest of time, and switched to a design that would work well with the vinyl cutter. It is essentially the same, but with no interleaved fingers.

One thing I should have anticipated is how much more sensitive these devices are to being squished than they are to the presence of a material with dialectric properties different from air. In the graph below, I tested two of the designed (with .05" and .25" width electrodes). The effect of the carbon fiber moving away from the device is visible as a small drop from the baseline. We see the effect doesn't significantly differ between the two electrode geometries.
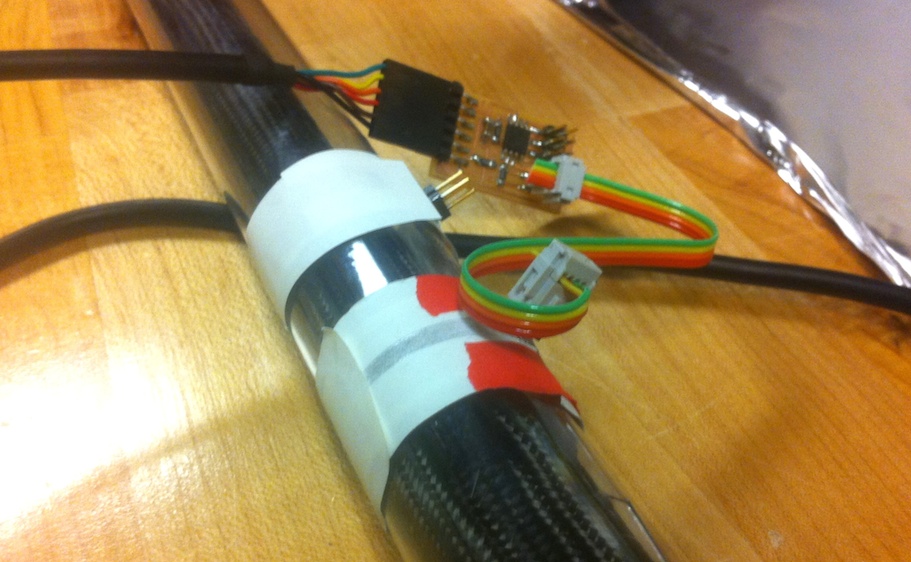
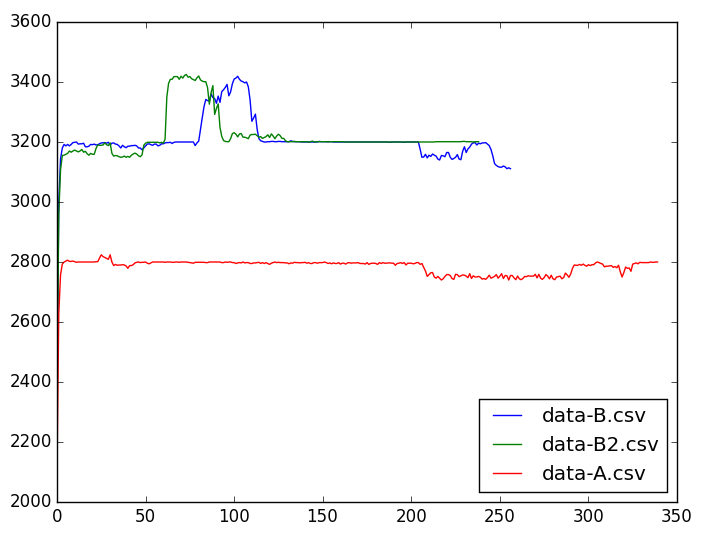
More noticable, however, is the large spike upwards which I believe comes from pressurizing the tube and stretching the sensor, effectively bringing the ground plane closer to the electrodes. Since they are so close to begin with, this small change produces a large change in capacitance.
Gelsight
I went to a very cool talk this week on micromeasurement of surfaces using elastomers. Professor Edward Adelson in CSAIL started a company called GelSight to provide devices for getting SEM-like results with a webcam and a chunk of thermoplastic elastomer.