
PhD student in the Computational Fabrication Group in CSAIL, I am interested in developing a machine whose workspace can be much larger than its size, with the hope of having it build other machines or physical artifacts of corresponding size, possibly also helping in scanning large areas very easily (and with much higher quality than drone-based solutions).
As of now, my machine goal is cable-driven to simplify the hardware implementation of large-scale motion axes (to the detriment of having to deal with a more complicated motion dynamic, but this can be solved offline in software, so it's fine).
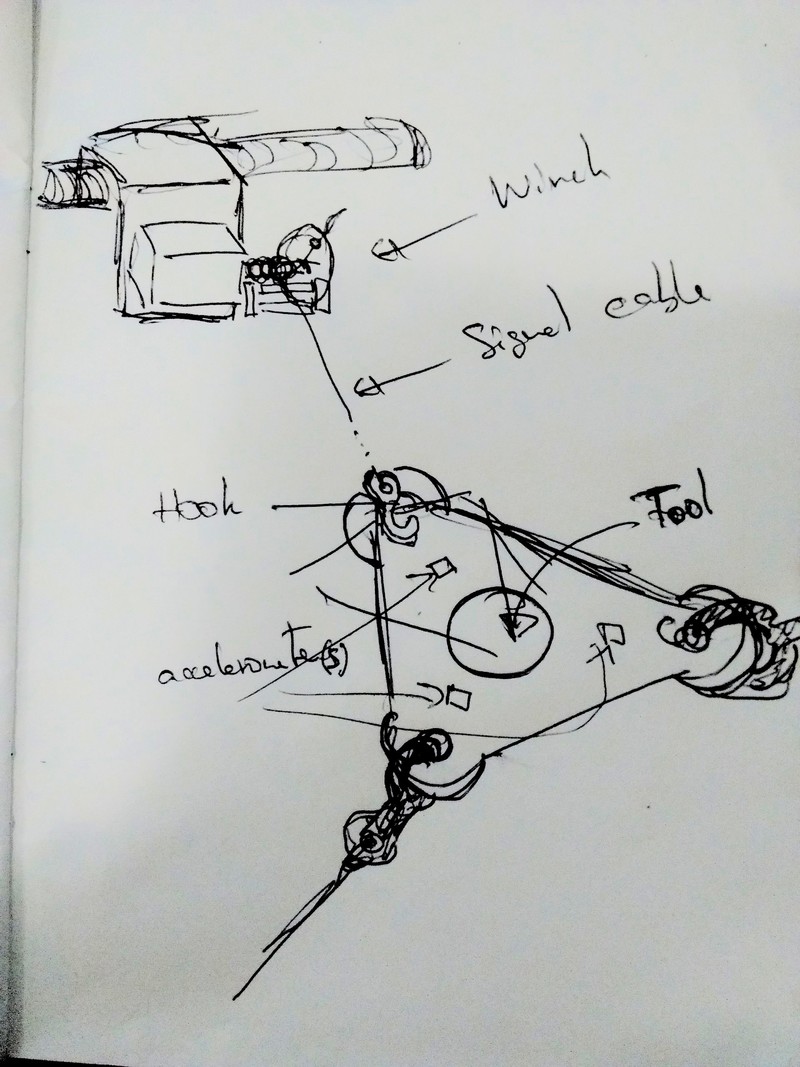
Furthermore, one big problem of cable-driven machines is their calibration. I want user-friendly automated calibration. This will probably imply the use of some sensors to determine the machine configuration (e.g. using accelerometers, sonic range, tension sensors).
My ideal machine would use closed-loop control thanks to stepper encoders (most likely magnetic encoders on the stepper back), and do automatic calibration to determine the precise location and configuration of the axes and the end effector.
I need also some slightly more complicated path planning since the axes are tightly coupled.
So far, given that doing all of that would be a stretch, I'll be focusing on the sound-based automatic calibration component, and the coupled-axes path planning part. If time permits, I'd be improving the accuracy of the machine by implementing closed-loop control with magnetic stepper encoders.
I signed up for path planning (I might have to write a path planner for coupled axes), as well as scanning processes (I have some experience, and this would be my first go-to end-effector). I will probably also talk about knitting machines since I am involved with it in my research group.