How to make something that makes (almost) anything
MAS.865 2018 | Ben Jenett
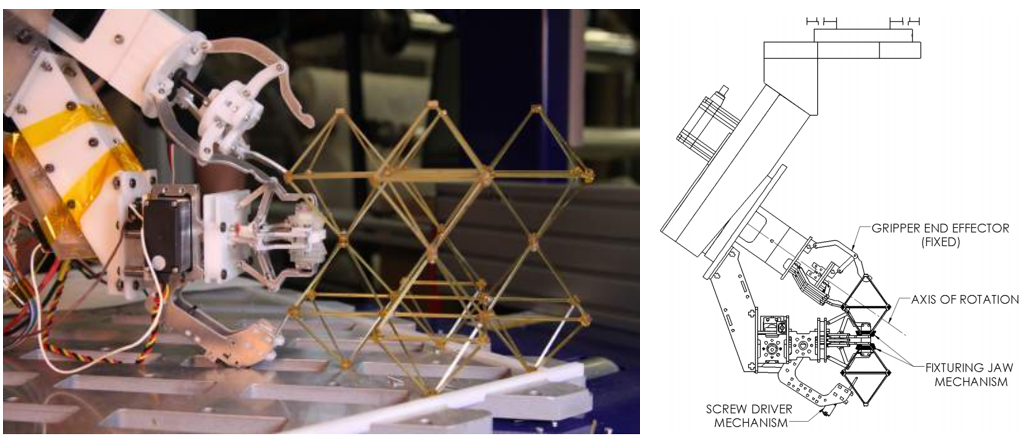
Discrete Assembly End Effector (component)
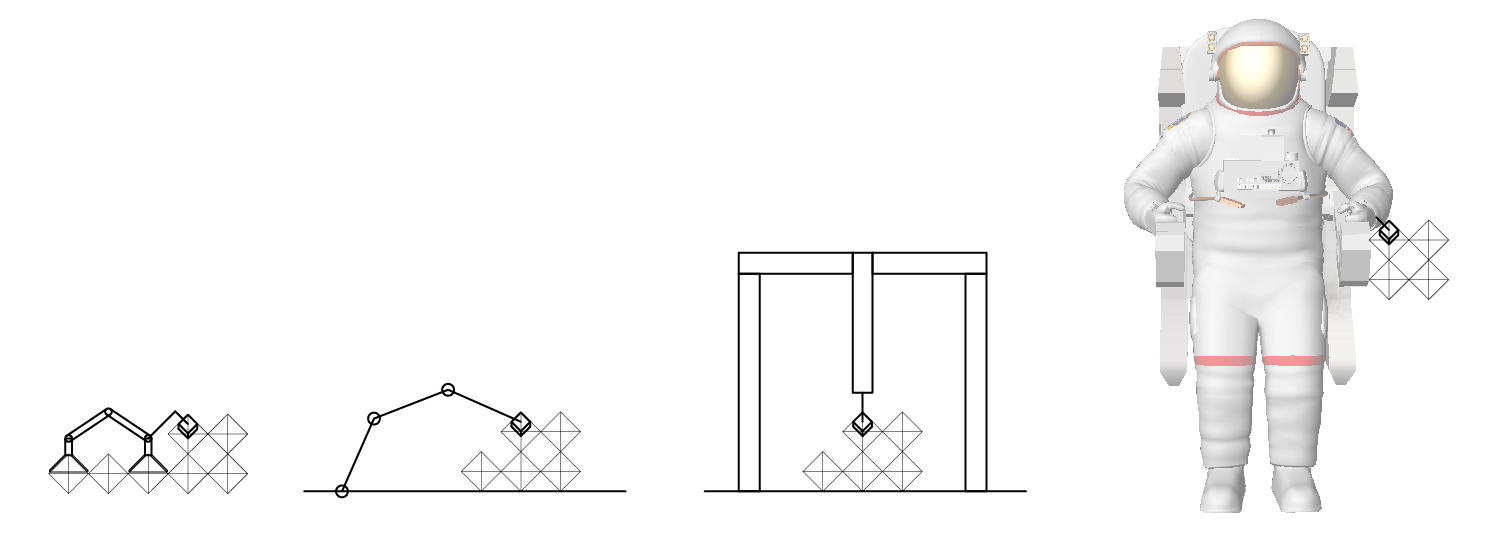
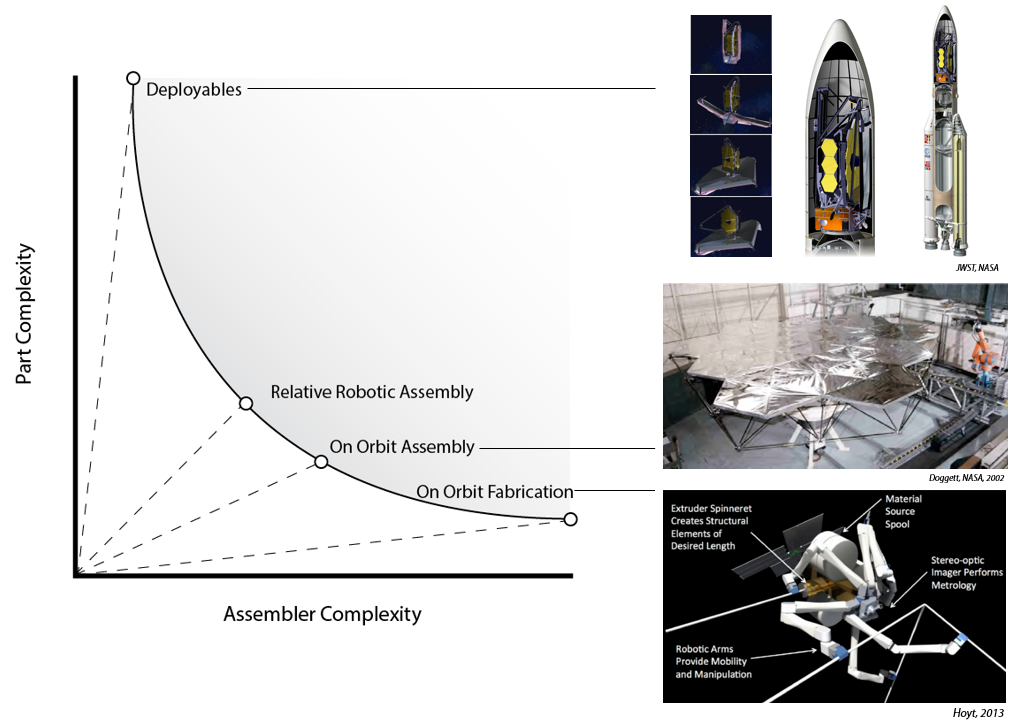
Part v Assembler Complexity
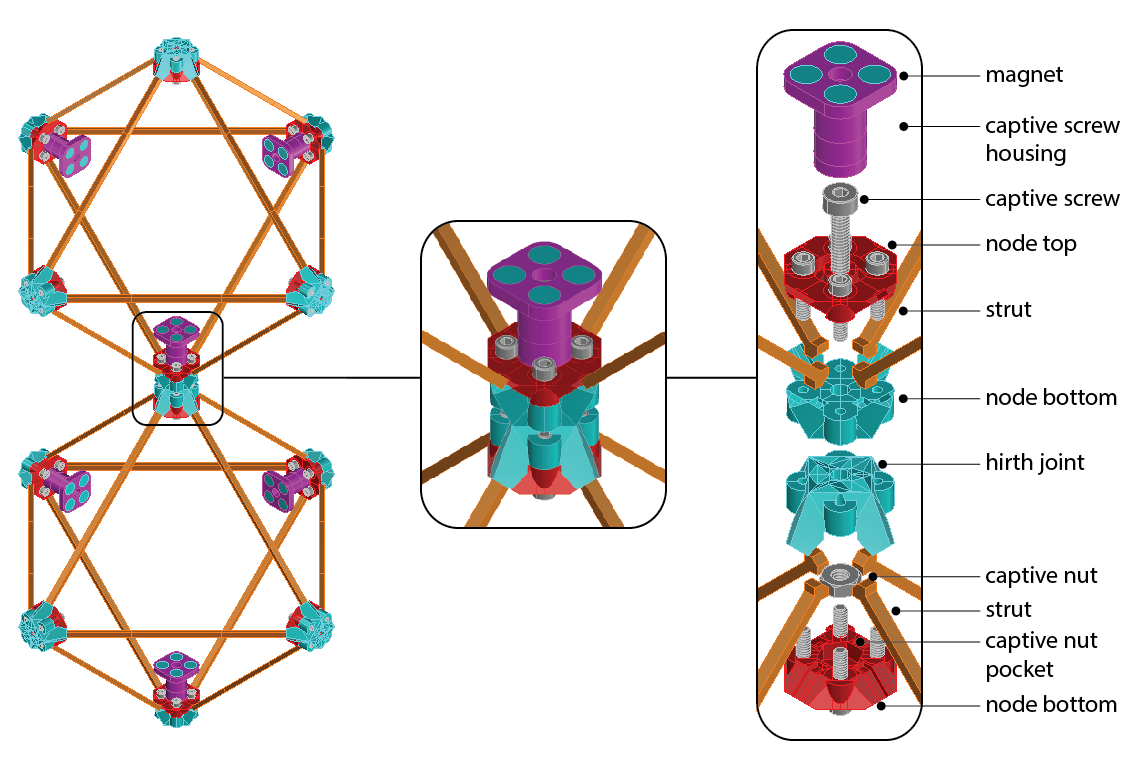
Captive Hardware, example
In order to produce accurate parts from a desirable material (CFRP), I developed a way to cut sets of struts using the branching pattern shown below.
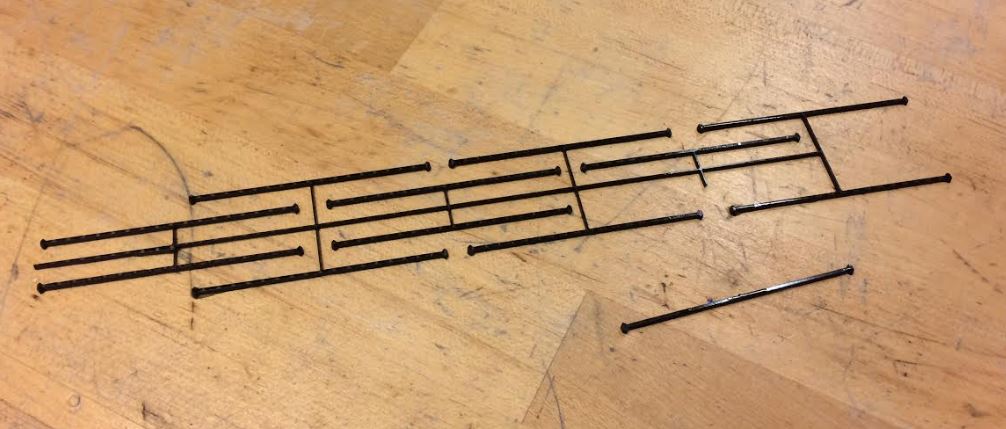
This allows parts to be cut in a single pass, while minimizing the cut time between head and tail of the part, thus resulting in part lengths repeatable within the tolerances of the machine (0.001 in)
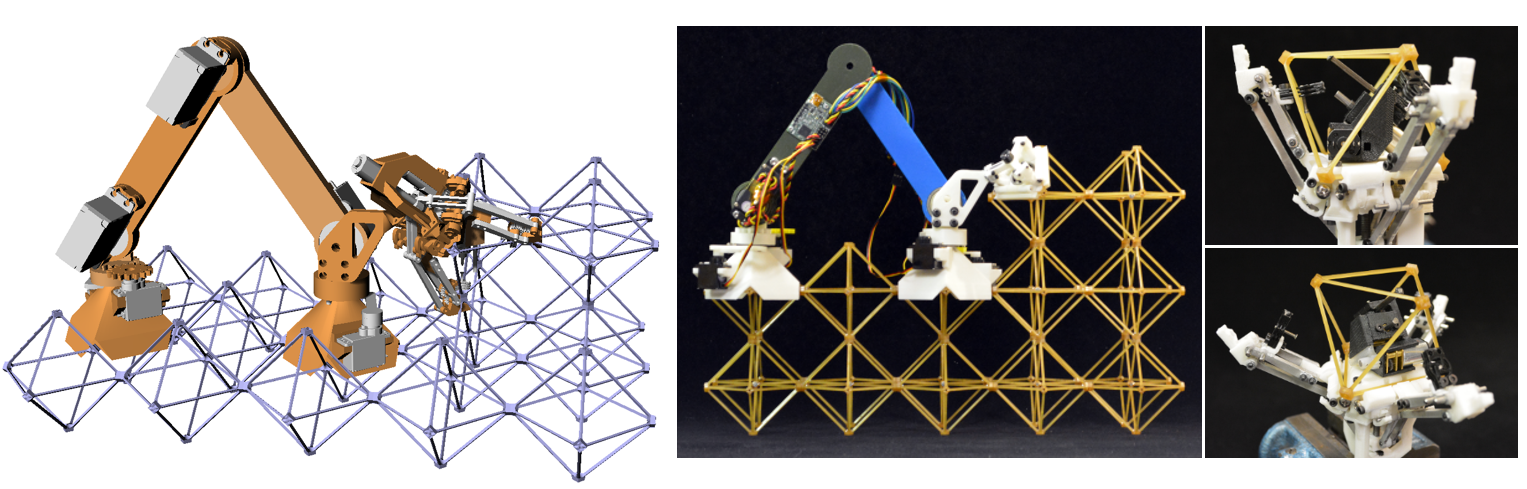
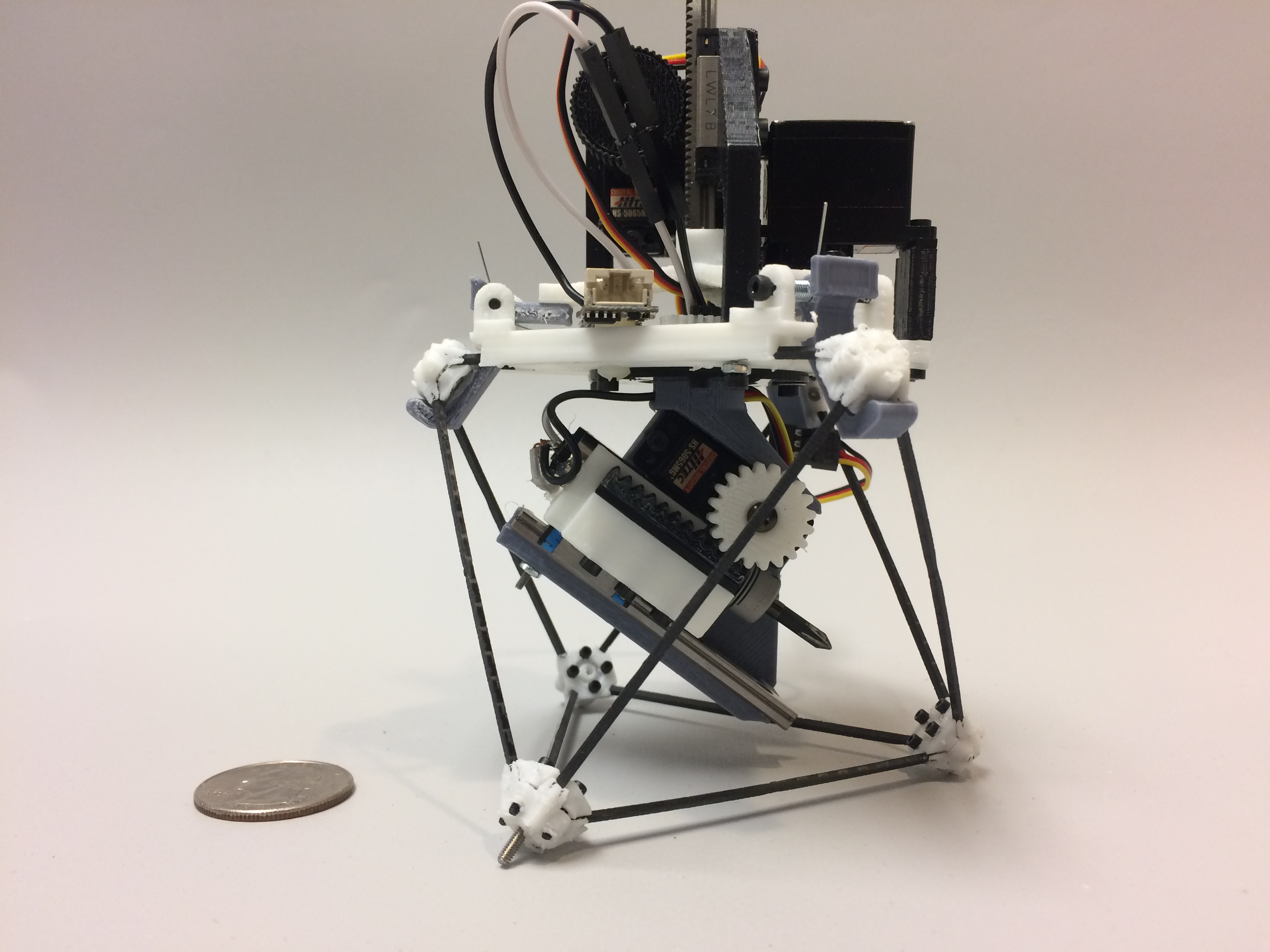
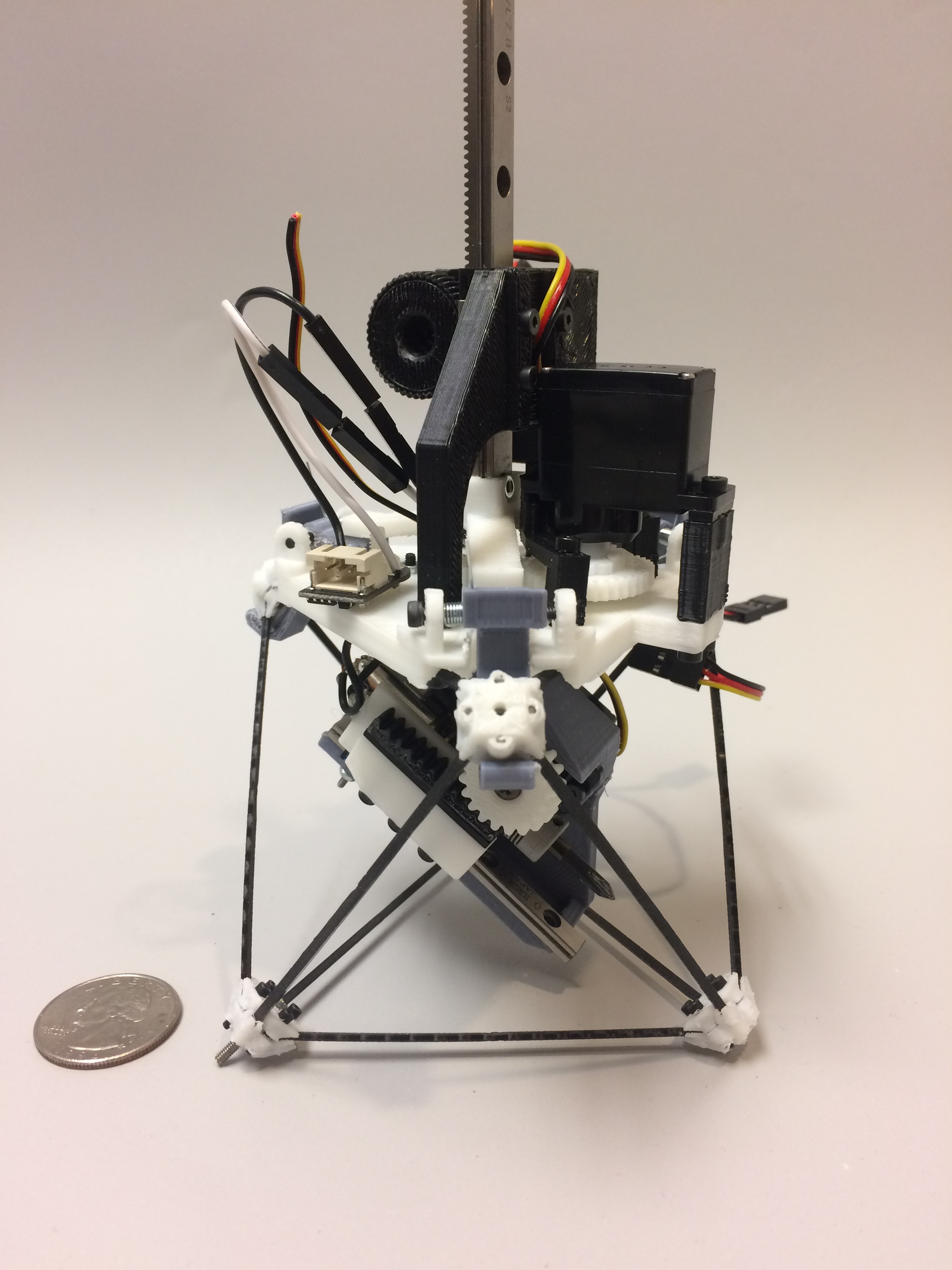
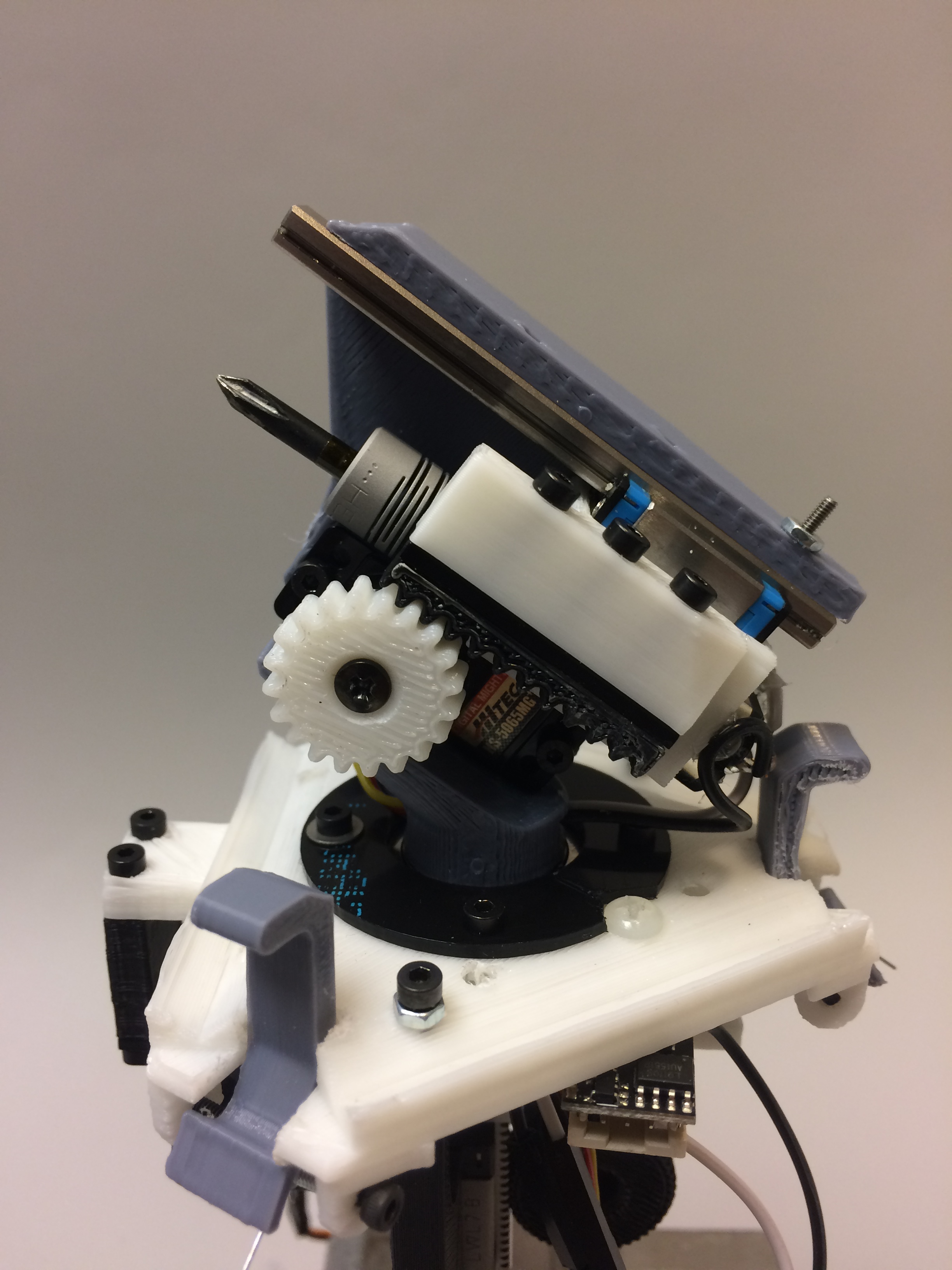
Bolter protoype
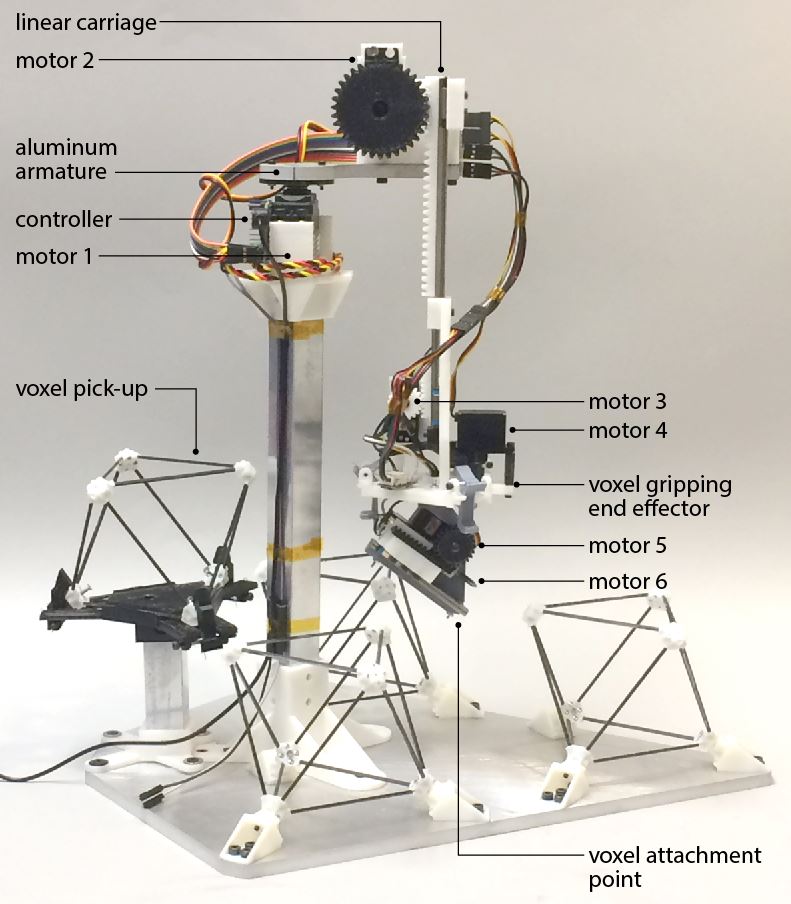
The effort for controls is to define the tasks of the machine and then to define motions to accomplish the tasks.
Main tasks:
- Pick up voxel at voxel station
- Bring voxel to location for assembly
- Assembly (fasten) voxel
- Return
Due to the setup of the machine, we can define these based on simple, internally closed-loop, position control settings.
Then, the build sequence is simply interpolating between these position settings, in sequence.
These positions are as follows:
- Start
- Rotate 90 to Voxel pickup
- Lower end effector
- Grip voxel
- Raise end effector with gripped voxel
- Rotate 180 to voxel placement location
- Lower voxel
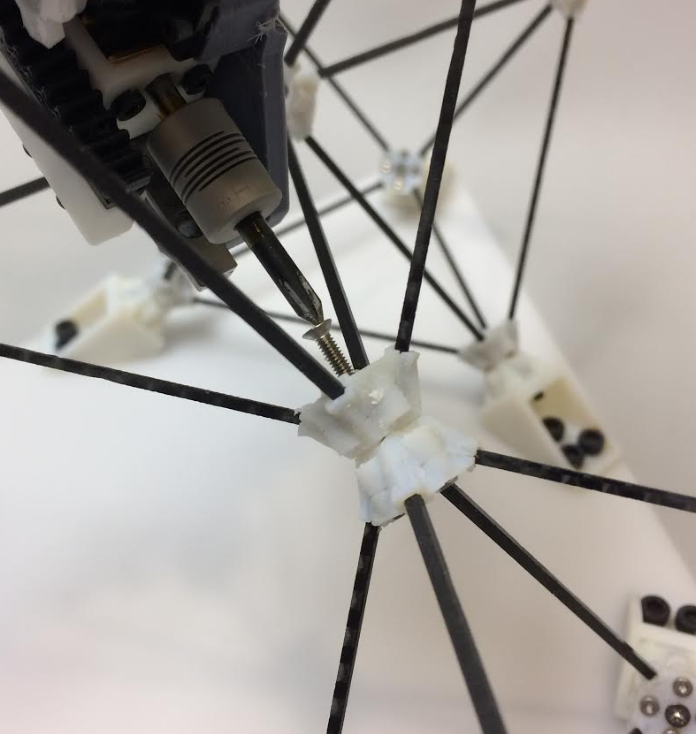
- Turn on drill
- Move drill forward, pause, move drill back
- Rotate drill to +120, repeat
- Rotate drill to -120, repeat
- Return to central position
- Ungrip voxel
- Raise end effector
- End