<br>
[MAS.865](../../index.html) > [People](../index.html) > Jake Read
## Working On:
- [*Networked Machine Kit*](https://gitlab.cba.mit.edu/jakeread/mkxmods)
- [mkrouter](https://gitlab.cba.mit.edu/jakeread/mkrouter)
- [mkstepper](https://gitlab.cba.mit.edu/jakeread/mkstepper)
- [mkbldc](https://gitlab.cba.mit.edu/jakeread/mkbldcdriver)
- [smallrotary](https://gitlab.cba.mit.edu/jakeread/smallrotary)
- [better linear axes](https://gitlab.cba.mit.edu/jakeread/rtcmill)
- actuator for proprioceptive robots
- search for control
## Documentation
To start working with networked hardware - steppers, routers, start at the [*mkxmods*](https://gitlab.cba.mit.edu/jakeread/mkxmods) project on gitlab.
### Currently:
- Finishing Networked Motion Control and simple hardware / software Mods -> Machine Kit implementation
### Goals:
- Networked Motion Control works, including packet timing
- One Tiny Robot arm does 6DOF control, dynamics (with Jorge)
- mkbldcdriver accepts speed commands for making spindles
### Ambitions:
- a design for a proprioceptive actuator
- motion control search: using motor feedback for acceleration tuning
- control search for 1DOF smallrotary joint
## Weekly Log
[Go here for week-by-week notes](/log.html)
## More Generally
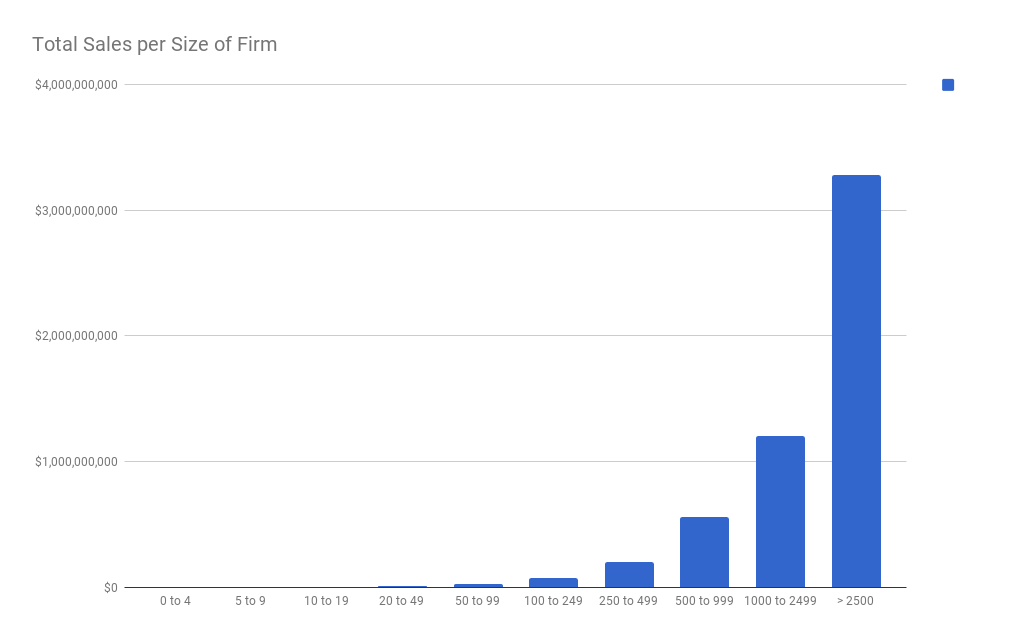
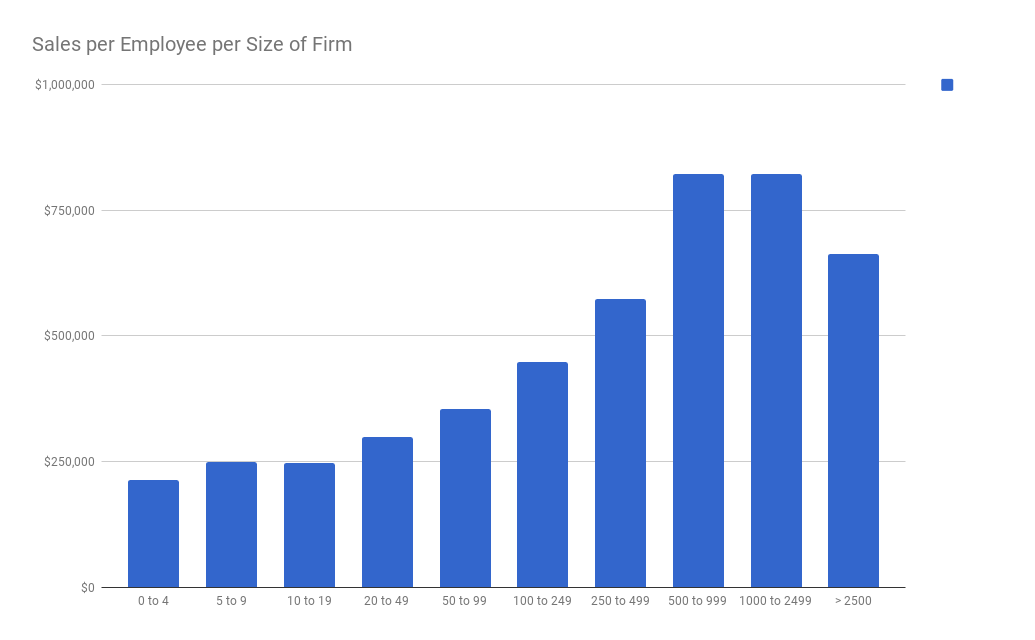
Right now, the distribution of the world's fabrication is similar to the distribution of wealth: a small number of large firms control the vast majority of it. This means that less of us are able to participate in the design of our world: we are consumers and not architects, and this seems to me like a great shame.
This has led me to focus on a few areas of work:
## Networked Motion Control
So, economics aside, the lightweight reconfigurable factory is an interesting technical challenge: primarily the missing link is good strategy for networking control of physical systems which are modular and reconfigurable and can easily be made to do many different things. Control across networks is challenging because networks introduce time-delays that are hard to measure that might cause a control loop to go unstable, or some action to be missed, or not coordinated in time with other actions, etc.
This work is taken up in the [mkxmods](https://gitlab.cba.mit.edu/jakeread/mkxmods) project. At this point, I'm through with building a few of the fundamental building blocks, a router, a stepper driver and a brushless motor driver.
Right now, I'm working through [my 'redux' project](https://gitlab.cba.mit.edu/jakeread/mkxmods/redux) wherein I tear down one of my old mills (with nasty nasty breadboard control circuitry) and install networked motors.


To demonstrate all of the layers working together I made this machine.
<video width="960" height="540" controls>
<source src="https://gitlab.cba.mit.edu/jakeread/mkxmods/raw/master/reich/video/reich-v01-web.mp4" type="video/mp4">
</video>
At the end of this project, I'd like to build a little tiny factory - probably to construct one of my other projects autonomously... maybe the small rotary joint, or the TDPD project, who knows.
Here's the current kit of parts:
[router:](https://gitlab.cba.mit.edu/jakeread/mkrouter)

[stepper driver:](https://gitlab.cba.mit.edu/jakeread/mkstepper)

[bldc driver:](https://gitlab.cba.mit.edu/jakeread/mkbldcdriver)

## Machines for Education
- picture of roller mill axis !
Learning can be hands-on and continuous, and should be empowering above all. Probably, it could be wicked fun as well. Primary to the work on network I mentioned above, these tools should also be 'discoverable' - easy to get started with and should offer enough depth and transparency that in tearing them apart, 'cutting the wire' they should educate people who use them.
This thrust is tied up in everything that I'm doing, but [this particularely is a machine system I'm designing for our education projects](https://gitlab.cba.mit.edu/jakeread/rtcmill). It's coming along.
## Actuators for Robots
There will be more robots. What's important is not whether or not we use them, but how we do and who has access to them. Same vein as work on Networks and Education: but from a Mech E angle. Robotic actuation is hard, and actuators are expensive, and this means that those with Capital have access to more Marginal Productivity, etc. Also this is a fun engineering problem, and I'm curious to see if fancy new design tools and weird control schemes will let us make actuators that haven't been previously considered viable.
<a href="https://jakeread.pages.cba.mit.edu/actuators/"></a>
To get through this, I'm working on a [low cost gearbox](https://gitlab.cba.mit.edu/jakeread/tdpd) and on a weird drive that combines electromotive force with gear reduction. Both are attempts at making better actuators that would cost less and work better. Imagine robotics, but as accessible as handdrills - and fabricable by individuals.
## Search for Control
On a high level, the intelligences that we (and machines) develop have a huge amount to do with how information is presented to them: successful implementations of Machine Learning algorithms rest primarily on how data is presented to them. Marleau-Ponty, Wittgenstein, Color in Language, etc for humans. This is an interesting statement, and it connects somehow to the way we might train robot AI: i.e. that they should have 'wide' access to, for example, motor control and feedback - not heirarchic access (I'm thinking of the strong body/mind link that makes us very distinctly human). I haven't spent too much time with this thought, but it seems like there are a few interesting questions within it.
On a lower level, when we build robotic systems, a lot of the complexity arises in the deviousness of the requisite tuning processes: even good PID loop tuning is something that can take experts weeks! When we build all of the systems mentioned above (networked factory production, machines for education) we should be able to embed some of this expertise in the systems.
To work towards this, I've started the [smallrotary](https://gitlab.cba.mit.edu/jakeread/smallrotary) project. It uses a tiny DC motor / gearbox and a high resolution encoder to actuate joints that might become a robot arm. This is a straightforward tesbed for control search.
- pic
<video width="960" height="540" controls>
<source src="https://gitlab.cba.mit.edu/jakeread/smallrotary/raw/master/video/quick-torque-tests-01.mp4" type="video/mp4">
</video>