<br>
## Rob's tracking page.
---
### Fab Machines
Machined and assembled HDPE/Delrin Jens axes with Jakes instantiation. Used Jakes files and followed his documentation
[here](https://gitlab.cba.mit.edu/jakeread/machineweek).
I took 2D outlines from the Rhino design file, imported into Vcarve (shopbot software) to make toolpaths. While I was able
to use the vector editing to make this work, I think that the Fusion 360 toolpath generation will be advantageous in big jobs like this one.
(Here I will link my Vcarve files.)

Design thoughts.
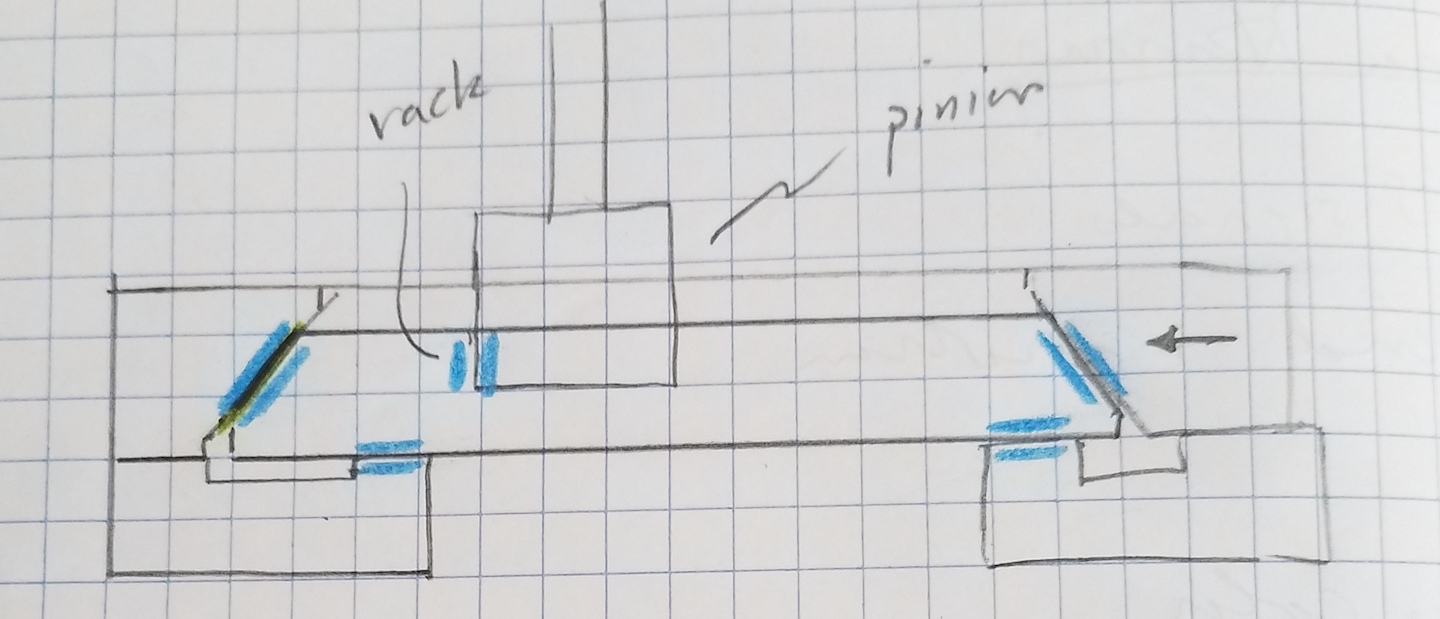
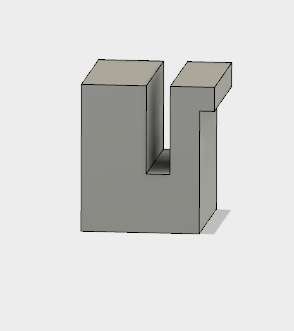
Below is a cross section detail of the slider/drive arrangement in the Jens axis.
(See below) The precision of the location a point on the slider depends on the tolerance and positioning of four distinct delrin parts, the relative position
of the rack and the pinion and four surfaces of the HDPE slider, two of which are machined at 45 degrees with not so nice a tool. When the qxes are put together
the choice is to bind or to leave sloppy. In my axes, there needs to be ~1mm play transverse to the axis direction, in order for the
slider to operate without binding.
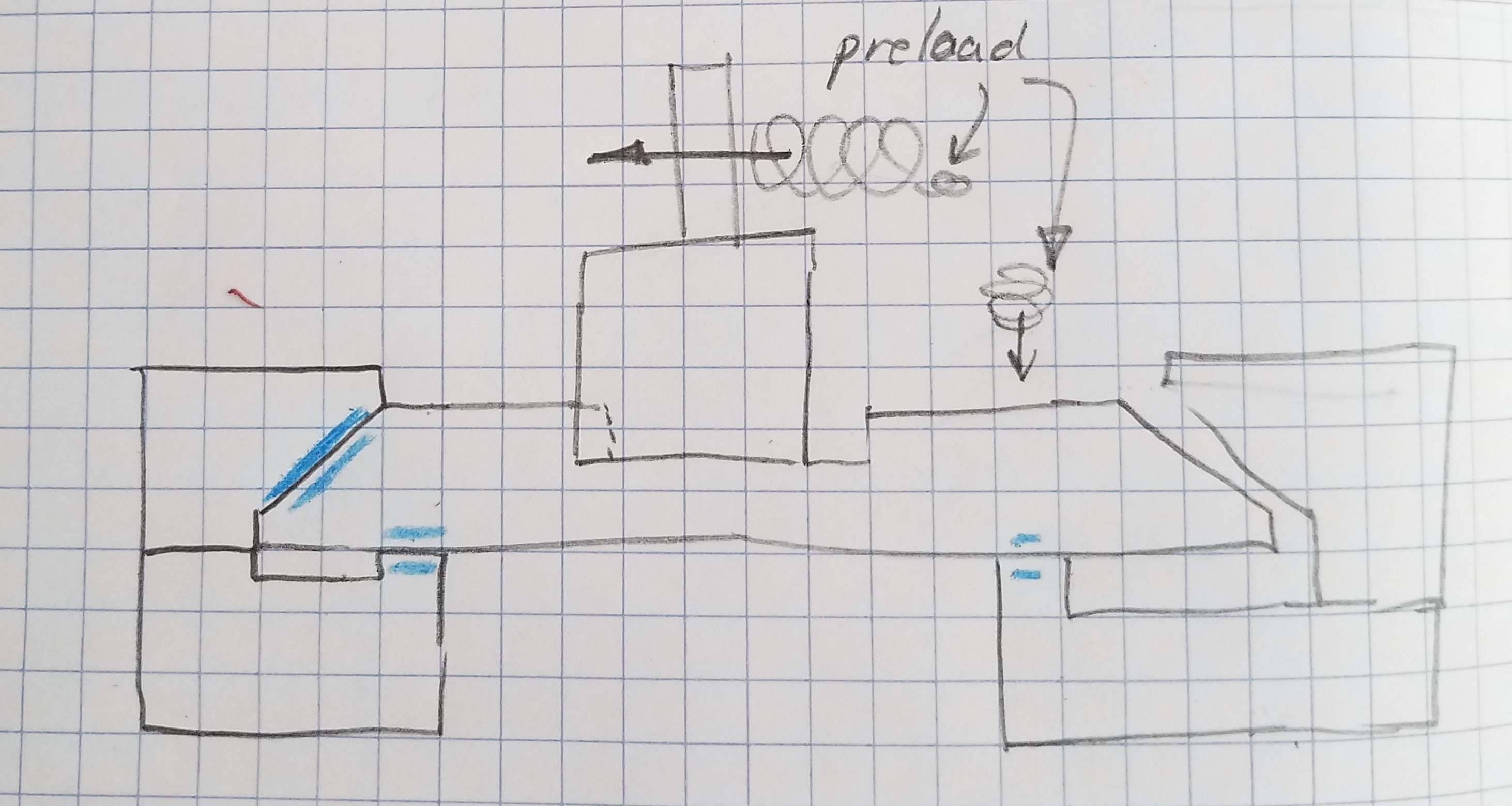
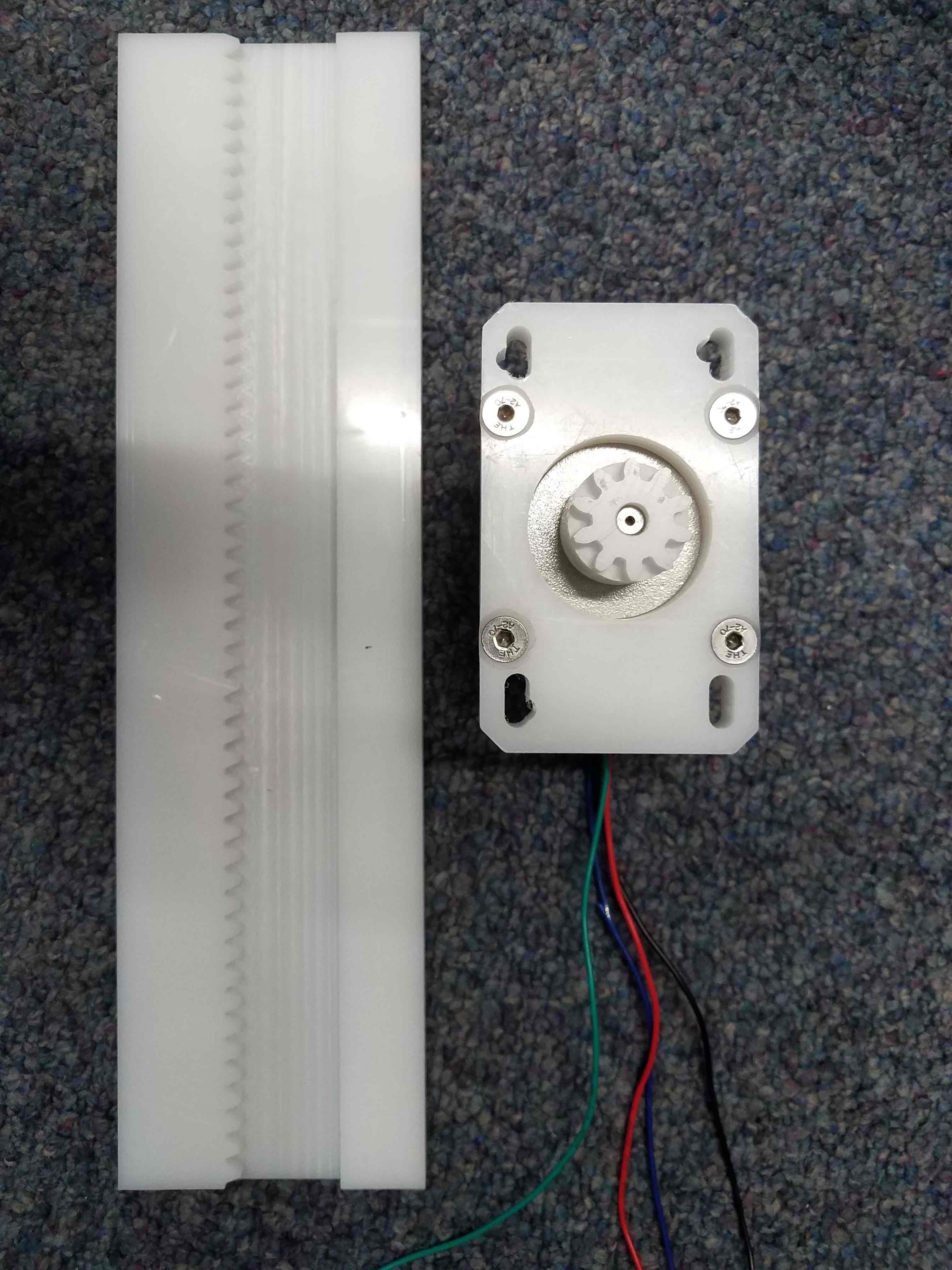
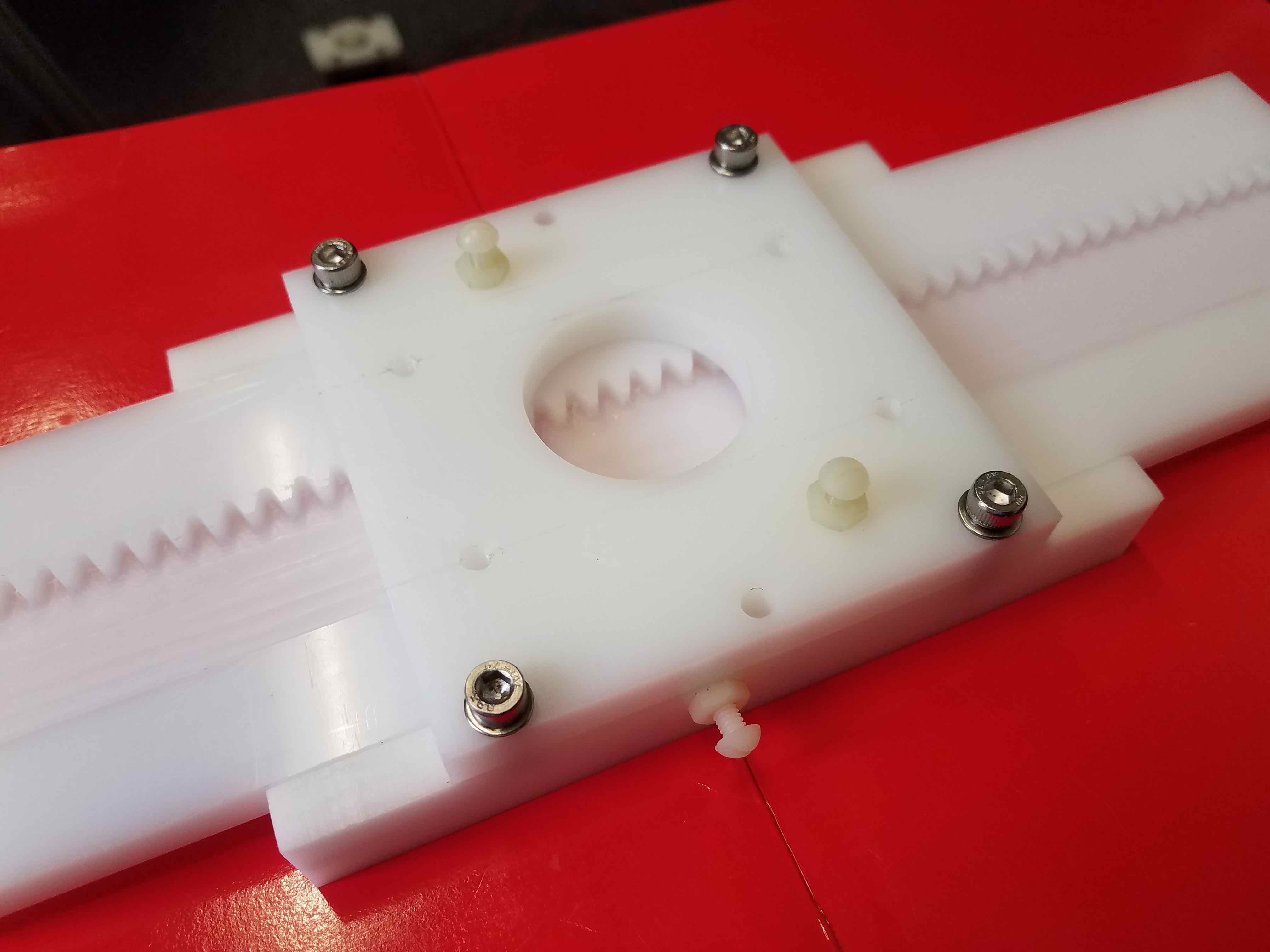
(Drawing below) By loosening the constraints on the side away from the rack/pinion, and providing a couple of preload spring forces, the situation is improved.
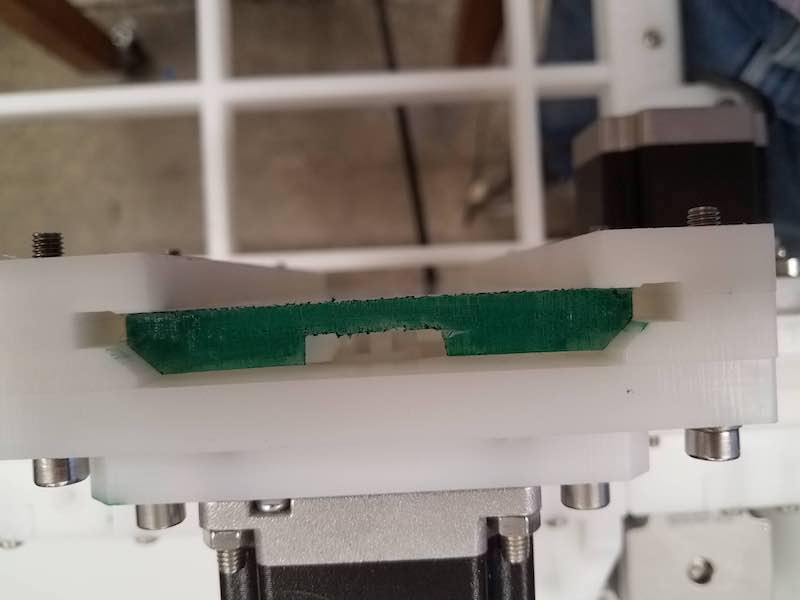
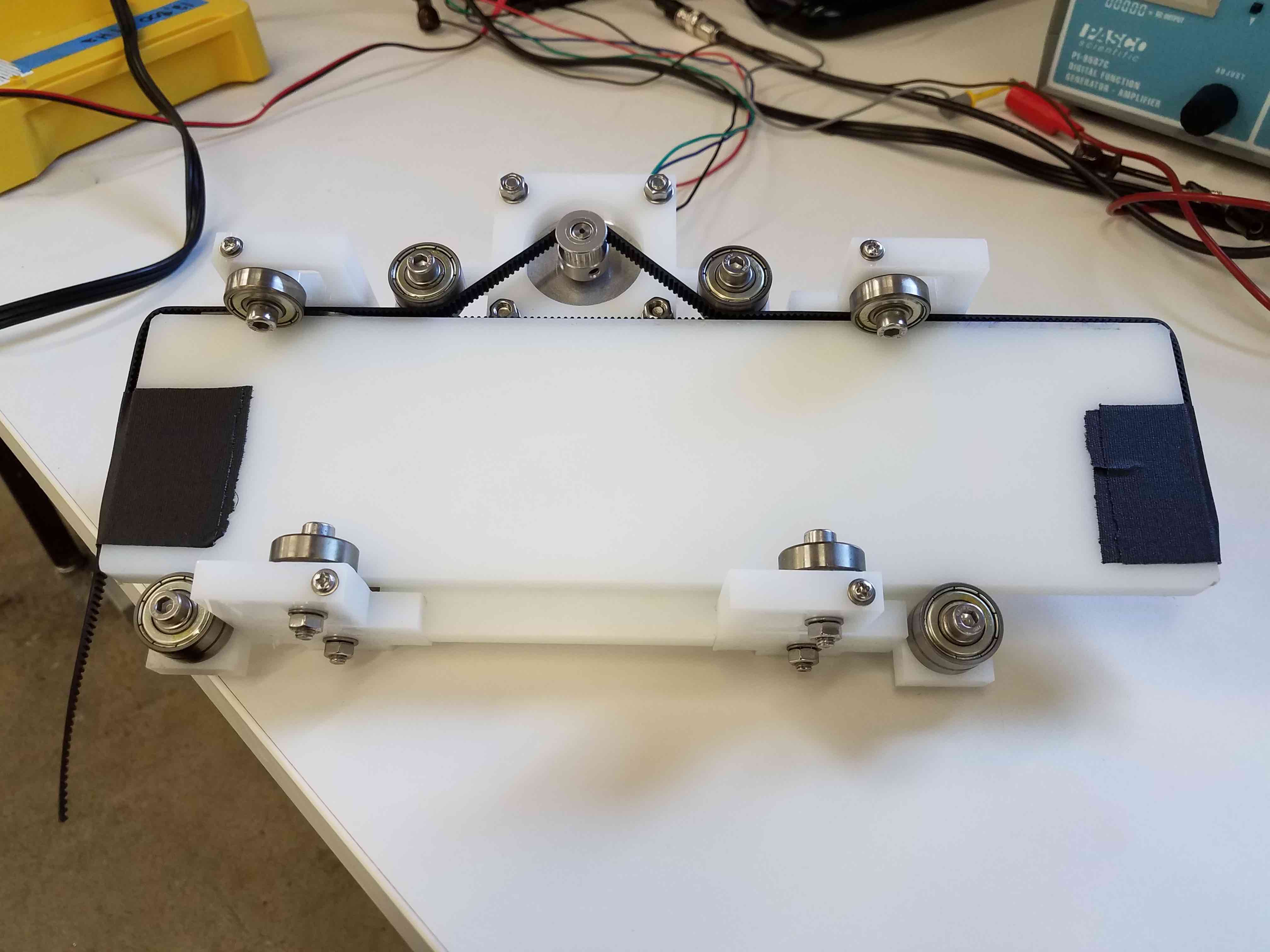
Below is a photo of an implementation of this. Note that the pinion translates ~+/- 0.5mm as each tooth is traversed. This does not affect the precision now, but
with the more highly constrained version, it would have led to binding or a need to relax the precision.
 
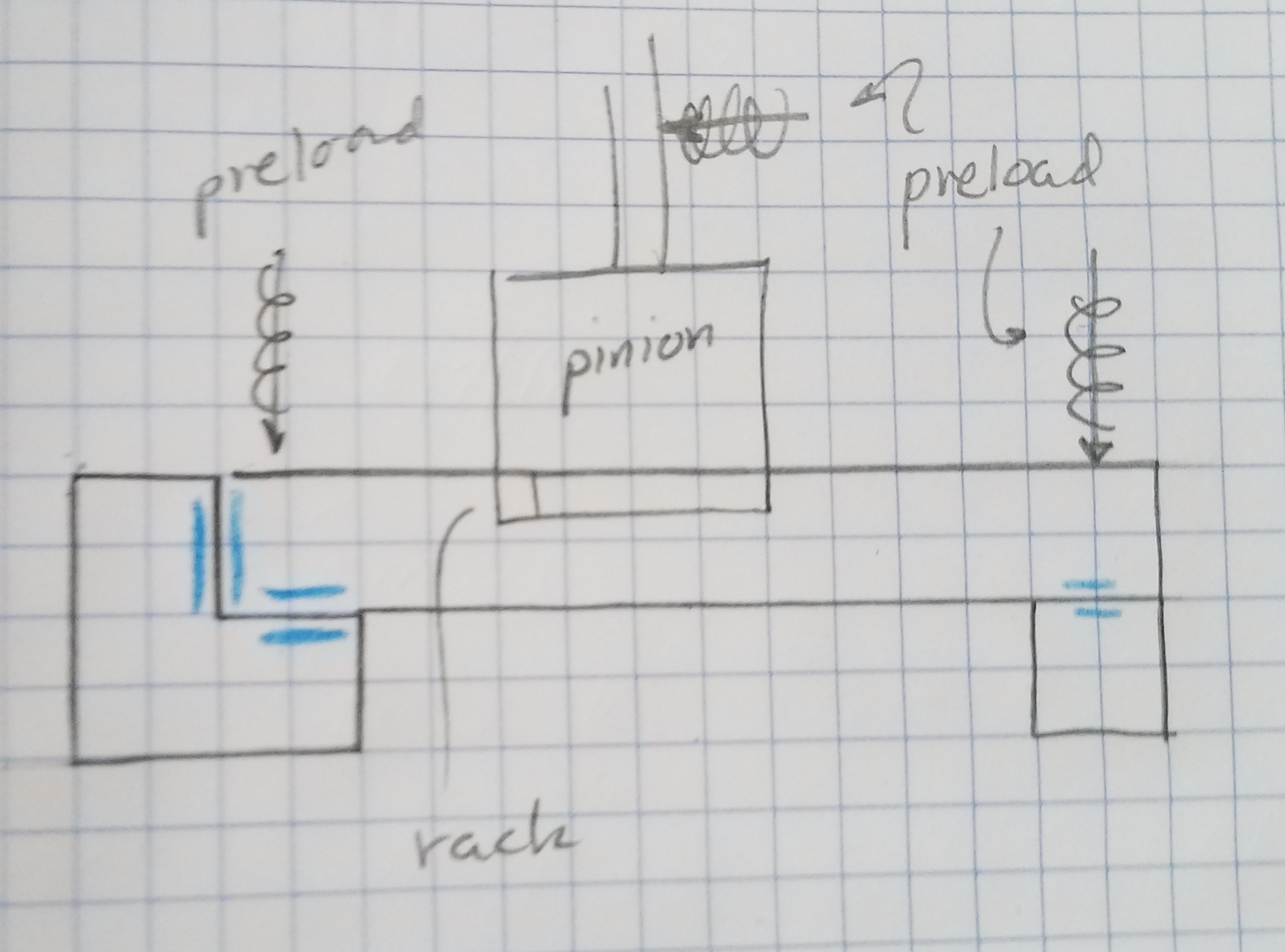
Below is a simple design that puts the requirement for precision into two or three machined parts, rather than a chain.
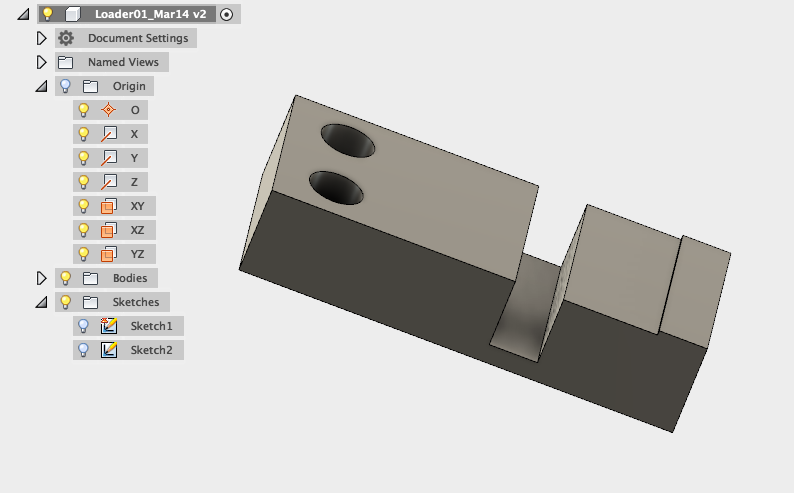
#### Learning about Fusion 360.
Parameter table accessed by big Sigma in the "Modify" menu.<br>
Use sketches and operations in way similar to machining process.<br>
Set up constraints in sketches.<br>
learning CAM in Fusion 360. Set up to machine simple load-slider-module.
<br>
<br>
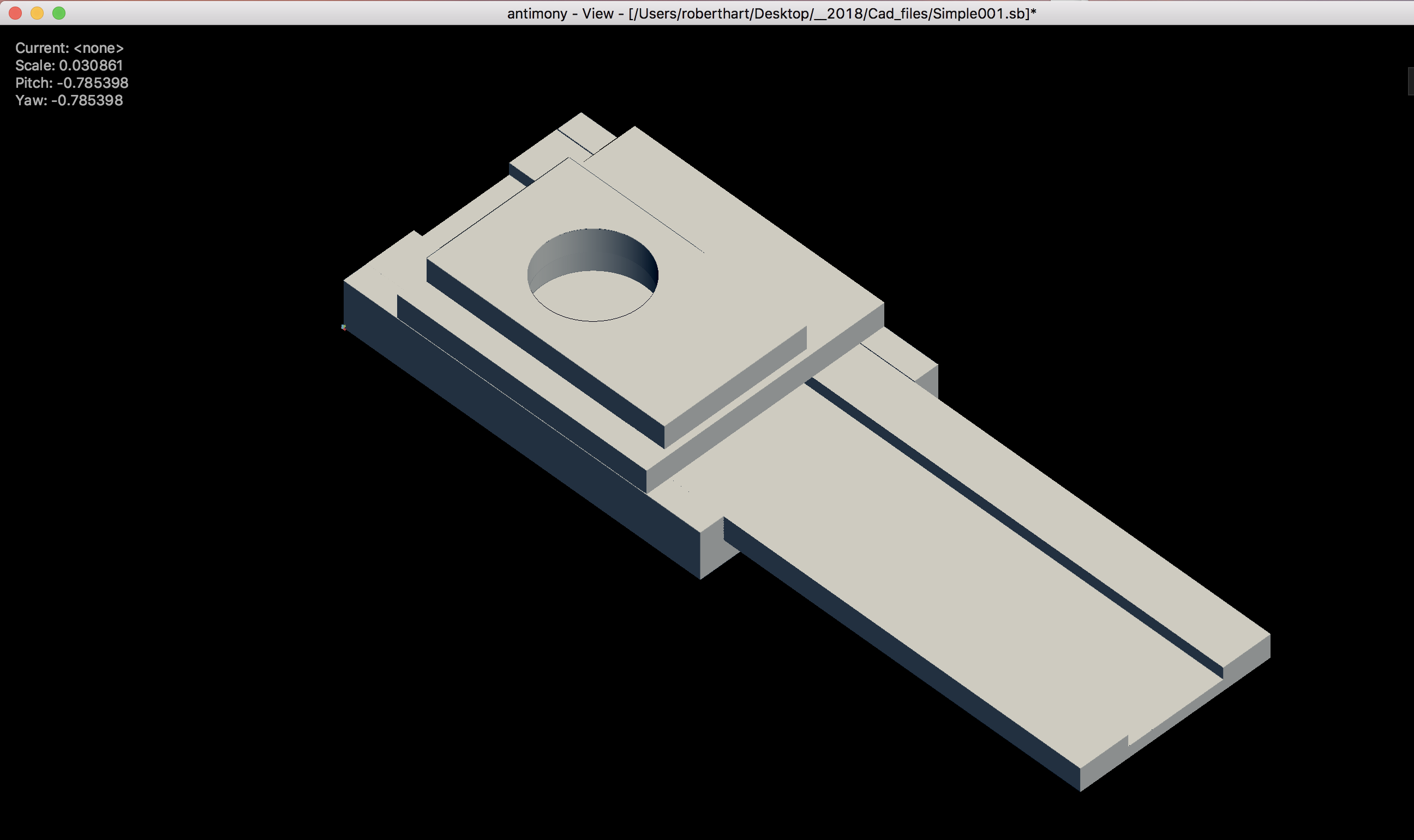
#### Simple sliding axis using Antimony.
[Antimony File Simple001.sb](Simple001.sb)
<br>
<br>
Here is a simple axis parametrically designed using Antimony. Not complete, but a starting exercise and at this point a pretty graph! Parameterized using
two thicknesses of material, lengths and widths of slider, stepping motor block, and length of axis. Think of this as an x-axis. Then the y and z constraints
are the Delrin slider block/HDPE rail. x-constraint is given by the rack. Preload in z is given by roller or slider elements not shown. Preload in y is given
by spring-loaded pinion gear (flex or spring-loaded stepper motor plate)
Parameter list is below:
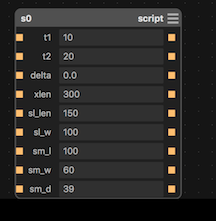
Next figure out how to describe rack and pinion in Antimony.
### [Video from Fab Academy recitation on Machine Building](http://fab.academany.org/2018/lectures/fab-20180416.html)
Jonathan Ward presents a flexing machine based on Jens axes.
Jens gives a convincing talk about his machines.
<ul>
<li>Correct speeds and feeds more important than fancy toolpaths. Suggests using single-flute endmill. See his site.</li>
<li>Describes double-gang rack and pinion.</li>
<li>See chamferrail readme</li>
<li>Look closely at Hattori.</li>
<li></li>
</ul>
### Spindle. Week of 4/16/18
Ordered Spindle and bearings as suggested by Jake: [Amazon order](https://www.amazon.com/gp/css/order-history/ref=nav_youraccount_orders)
### Axis machining
- Use Jakes Fusion 360 model to CAM and machine a set of axes.
- [The slightly modified file from Jake with CAM added:](RCT CAM May4 v3.f3d)
- May 7-8: increase belt clearance, glue belt to slider - axis is now usable.
- May 7-9: Design rack and pinion using Neils mods, and make shopbot toolpaths in mods to make axis.
- 
[The mods program](rackdesign001.txt)
- This axis arrangement has six sliding pads analogous to the roller-coaster bearings. Three are intended to be stiff and three springy. The springy ones are now nylon screws, but
can be designed into the material as flexures with adjustment. Friction ~ 2-3 N.
- 
- picture of the nylon screws in positions where flex pads will be placed.
- May 10-17: Finish sliding-pad axis. Investigate and design axis with HDPE clips for joining plates.
- . Picture of the spring-clip insert for variable compression.
[Here is the Fusion 360 file](SimpleAxes002_v6.f3d) for the slider axes.
- 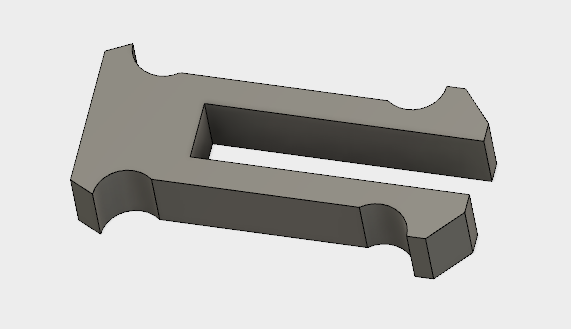 a picture of the clip.
[The Fusion 360 File for the clip](snap-pins_May16_v4.f3d)
### Fiber machines
Needle felting machine.
Fulling machine.
Spinning machine.