11 May 2009
Stepper Motor Speed Profile
AVR Application Note AVR446
AVR446 Source Code
4 May 2009
i0.3.out.88.cad
i0.3.out.88.web.v4.asm
i0.3.serial.88.cad
i0.3.serial.88.packet.asm
27
April 2009
Link to Allegro A3984 Datasheet
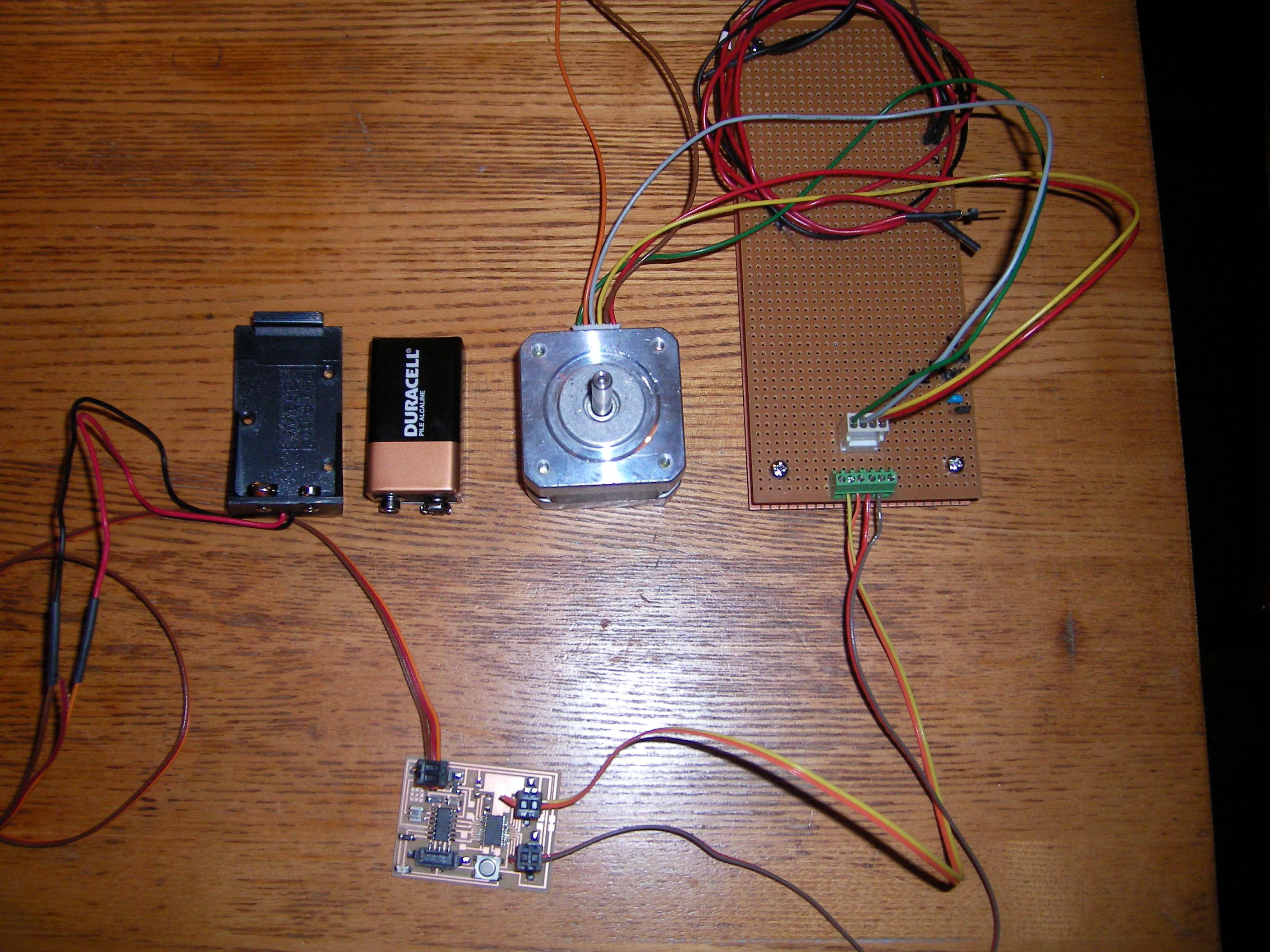
Power supply, motor and wiring ready to test the new bipolar stepper driver Internet Zero node.
Selection of sense resistors and reference voltage
Note: maximum rating (0.5 V) on the SENSE1 and SENSE2 pins is not exceeded.
The
maximum value of current limiting is set by the selection of Rsx and
the voltage at the VREF pin. The transconductance function is
approximated by the maximum value of current limiting, ITripMAX (A),
which is set by
ITripMAX = Vref / ( 8 %D7 Rs )
where Rs is the resistance of the sense resistor (Ω) and Vref is the input voltage on the REF pin (V).
We assume that the maximum current we need is 0.5 amp per phase.
V = IR %A0=> V = 0.5*Rs for each phase.
Assuming Rs is 0.5 Ω, V = 0.25 V < 0.5 (less than maximum rating on the SENSE1 and SENSE2 pins).
Since Rs = 0.5 Ω and ITripMAX = 0.5 amps,
0.5 = Vref / (8 x 0.5)
=:> Vref = 0.5 * 4 = 2V
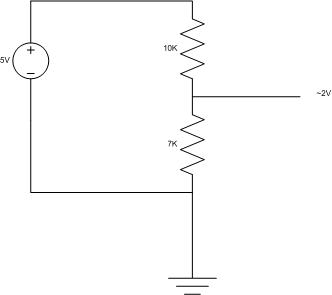
We can make a voltage divider with Rtop 10K and Rbottom 7K.

13 April 2009
hello.H-bridge.44.cad
i0.3.bipolar.44.cad
i0.3.H-bridge.44.cad
i0.3.IO.44.cad
i0.3.IO.44.thtpv4.asm
i0.3.sensor.44.cad
i0.3.serial.44.cad
i0.3.serial.44.packetv4.asm
i0.3.stepper.44.cad
thtpv4.py
i0.3.out.88.web.v4.asm